






目录
一、ROS简介
ROS(Robot Operating System)是一个用于机器人软件开发的灵活框架,其目标是促进复杂而可重用的机器人软件开发。尽管被称为“操作系统”,ROS实际上更接近于一个中间件或一个软件开发套件(SDK),它提供了操作系统应有的服务,如硬件抽象、底层设备控制、常用功能的实现、进程间消息传递以及包管理等。
二、ROS安装
1.添加ROS软件源
将这条命令在ubuntu的终端执行
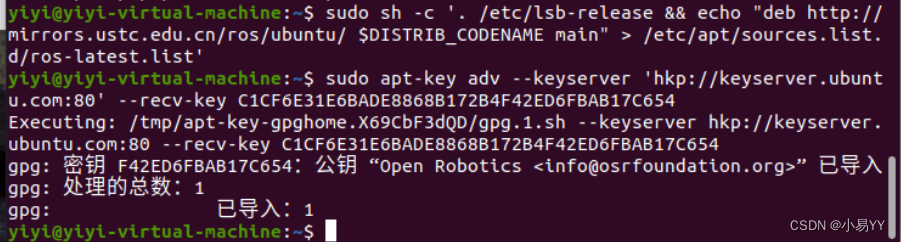
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
2.添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
成功后显示:
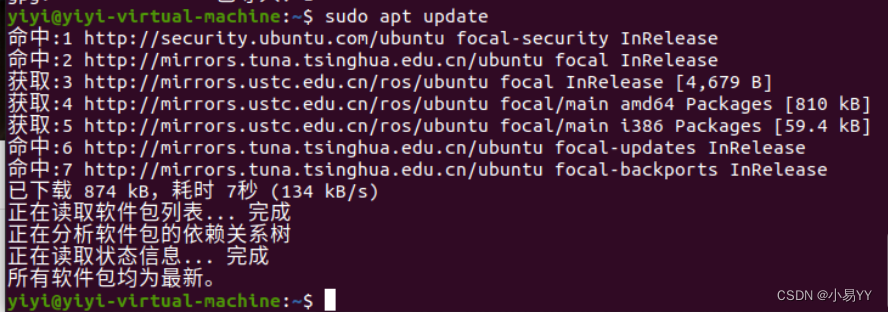
3.更新软件源
sudo apt update
成功后显示:
4.安装ROS
sudo apt install ros-noetic-desktop-full
运行命令后会显示如下界面:
5.初始化rosdep
sudo rosdep init
在这里我出现了错误:找不到命令
可以输入命令
sudo apt install python3-rosdep2
命令执行完后接着又出现了错误:ERROR: cannot download default sources list from:https : //raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.listWebsite may be down.
输入命令:
sudo gedit /etc/hosts
然后在打开的文件中添加如下的内容
199.232.28.133 raw.githubusercontent.com
命令执行完后接着又出现了错误:ERROR: default sources list file already exists: /etc/ros /rosdep/sources.list.d/20-default.listPlease delete if you wish to re-initialize
输入以下命令:
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
再输入sudo rosdep init命令,成功运行
6.设置环境变量
(1)输入下面的这行代码,注意我的ubuntu是20.04版本,对应的是noetic,需要根据自己的版本查找
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
再运行分别两个命令,让环境变量生效
gedit .bashrc
source ~/.bashrc
7. 安装rosinstall
输入命令
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
验证ROS是否安装成功
输入以下命令:
roscore
我出现了问题

输入以下命令
sudo apt install ros-noetic-desktop-full
又出现了问题

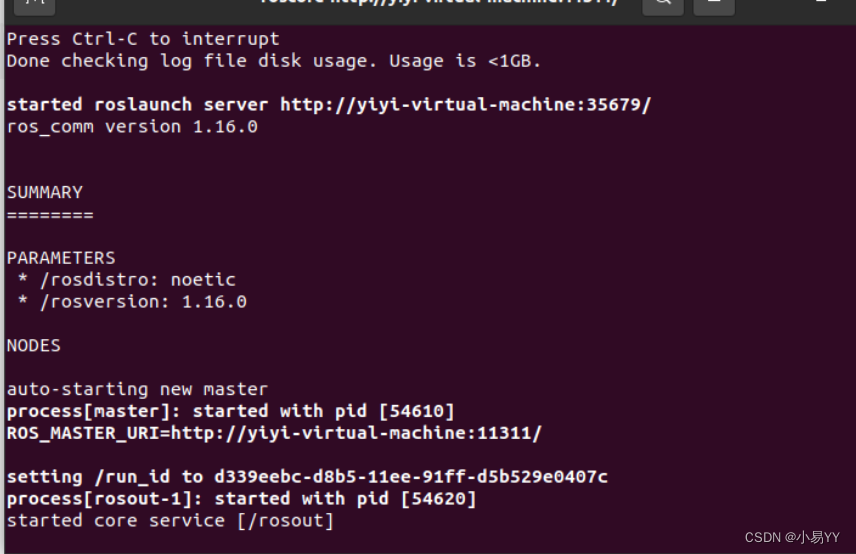
输入以下命令
source /opt/ros/noetic/setup.bash
再输入roscore,显示安装成功:
三、小海龟实验
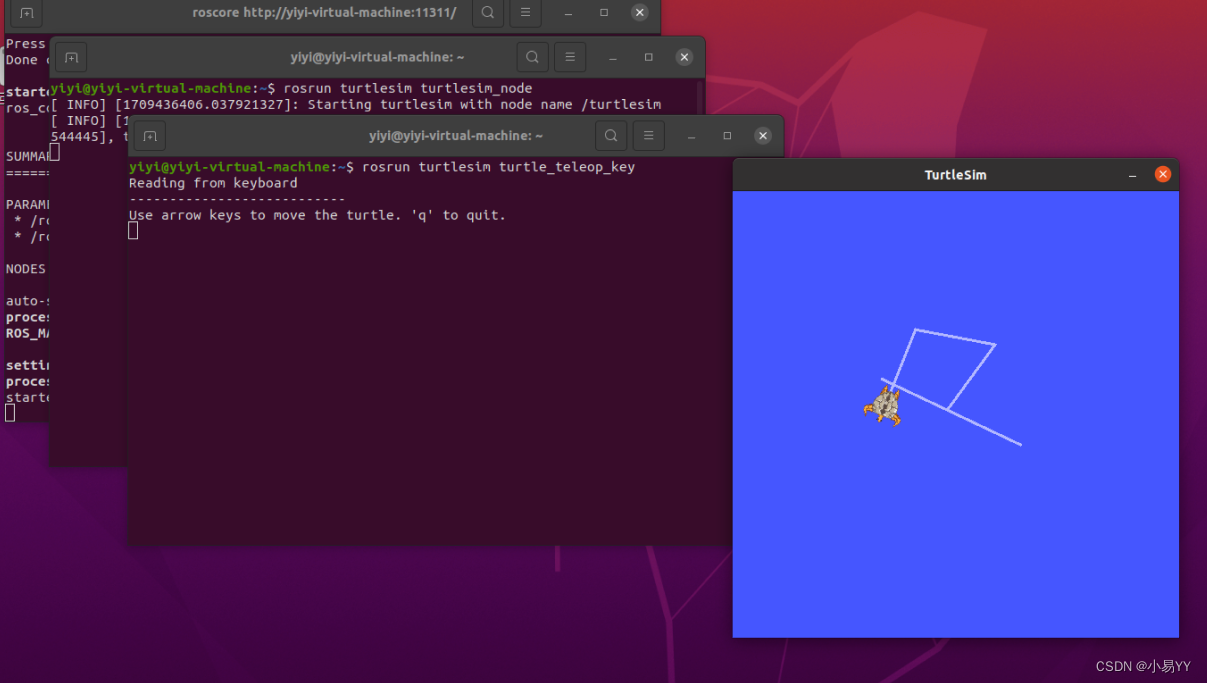
1.键盘控制小海龟
新建终端运行ros
roscore
新建终端启动小海龟的仿真器
rosrun turtlesim turtlesim_node
新建终端打开键盘控制器
rosrun turtlesim turtle_teleop_key
可以通过键盘上下左右键对小海龟进行控制
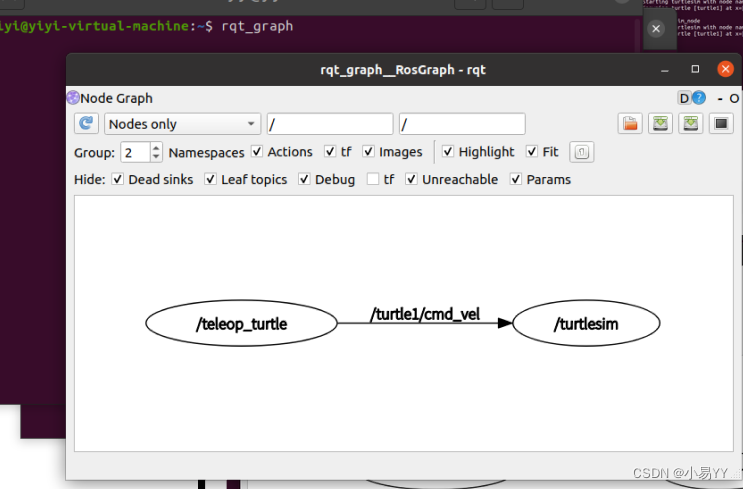
2.话题查看器查看两个node之间的消息传递
新建终端输入命令查看话题
rqt_graph
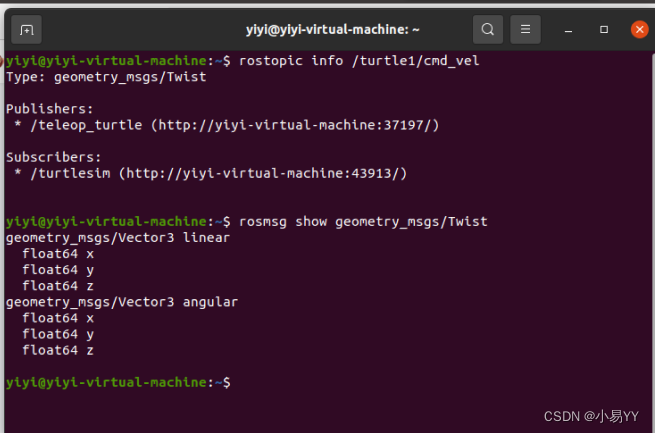
输出话题的内容:
rostopic info /turtle1/cmd_vel
查看自定义类型有什么:
rosmsg show geometry_msgs/Twist
3.用C++写一个程序,控制小海龟走圆形
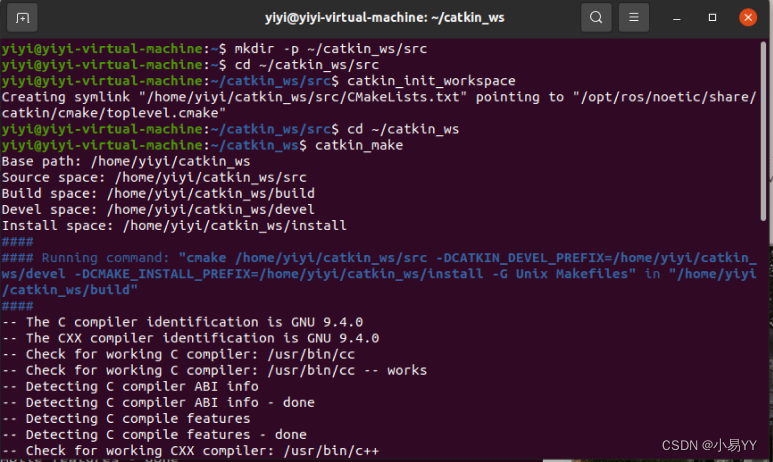
3.1创建工作目录
新建一个文件夹,命名为catkin_ws,在文件夹 catkin_ws 下创建一个文件夹 src,移动到src目录下输入catkin_init_workspace。在src文件夹中出CMakeLists.txt文件,返回catkin_ws,对其进行编译
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws
catkin_make
3.2设置环境变量
source devel/setup.bash
echo $ROS_PACKAGE_PATH

3.3Package创建
cd ./src
catkin_create_pkg my_turtle_package std_msgs rospy roscpp
进入my_turtle_package的src文件中

新建画圆程序名为yuan.cpp
touch yuan.cpp
3.4画圆C++程序
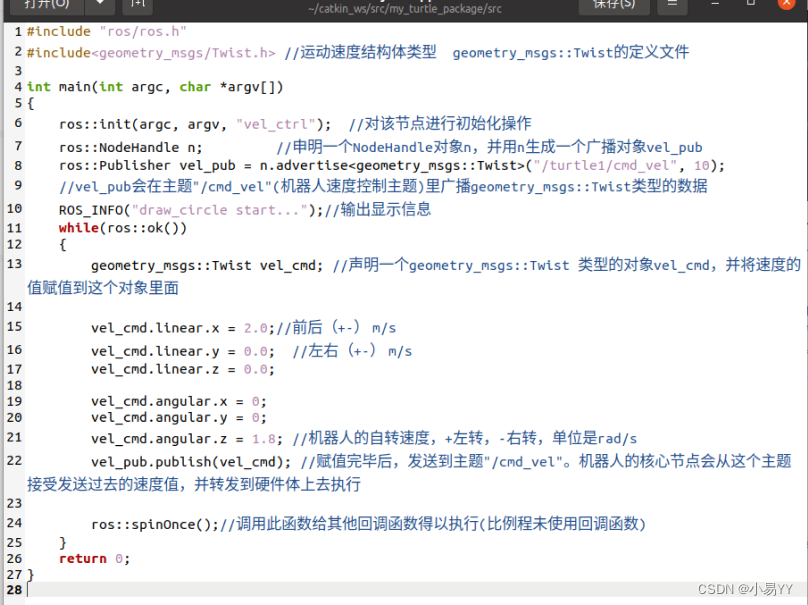
打开yuan.cpp,写入代码
#include "ros/ros.h"
#include<geometry_msgs/Twist.h> //运动速度结构体类型 geometry_msgs::Twist的定义文件
int main(int argc, char *argv[])
{
ros::init(argc, argv, "vel_ctrl"); //对该节点进行初始化操作
ros::NodeHandle n; //申明一个NodeHandle对象n,并用n生成一个广播对象vel_pub
ros::Publisher vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
//vel_pub会在主题"/cmd_vel"(机器人速度控制主题)里广播geometry_msgs::Twist类型的数据
ROS_INFO("draw_circle start...");//输出显示信息
while(ros::ok())
{
geometry_msgs::Twist vel_cmd; //声明一个geometry_msgs::Twist 类型的对象vel_cmd,并将速度的值赋值到这个对象里面
vel_cmd.linear.x = 2.0;//前后(+-) m/s
vel_cmd.linear.y = 0.0; //左右(+-) m/s
vel_cmd.linear.z = 0.0;
vel_cmd.angular.x = 0;
vel_cmd.angular.y = 0;
vel_cmd.angular.z = 1.8; //机器人的自转速度,+左转,-右转,单位是rad/s
vel_pub.publish(vel_cmd); //赋值完毕后,发送到主题"/cmd_vel"。机器人的核心节点会从这个主题接受发送过去的速度值,并转发到硬件体上去执行
ros::spinOnce();//调用此函数给其他回调函数得以执行(比例程未使用回调函数)
}
return 0;
}
3.5修改CMakeLists.txt文件内容
返回my_turtle_package,打开CMakeLists.txt文件

在CMakeLists.txt文件中找到##Declare a C++ executable,在这一行的前面添加如下内容:
add_executable(yuan src/yuan.cpp)
target_link_libraries(yuan ${catkin_LIBRARIES})

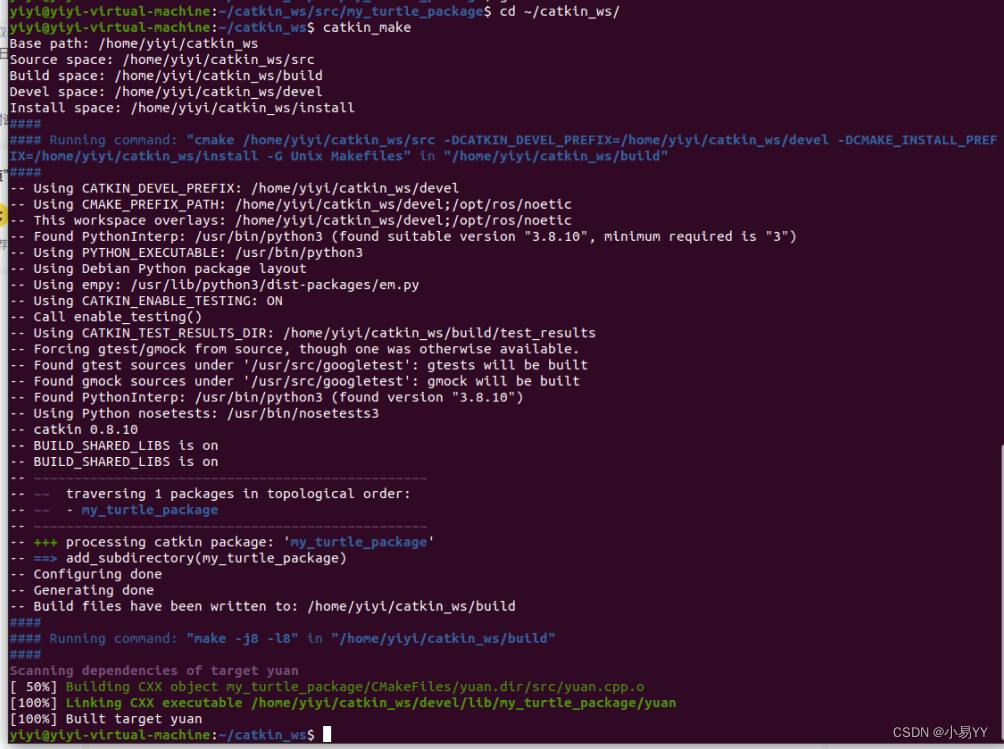
3.6编译程序
cd ~/catkin_ws/
catkin_make
3.7运行程序
新建终端,运行ros
roscore
再新建一个终端,启动海龟
rosrun turtlesim turtlesim_node
再新建一个终端
cd ~/catkin_ws/
source devel/setup.bash #程序注册
rosrun my_turtle_package yuan
效果如图:

四、总结
安装ROS的整个过程中,出现许多的错误,通过网络查询,一步一步解决问题,花费了较多时间。不过通过解决这些问题我对ROS有了更深刻的理解,使用C++实现小海龟画圆实验使我对ROS有了初步的实践。















 1628
1628











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









