







基于YOLOv5的实时水果识别系统与分类系统演示与介绍(Python+ui界面+训练代码+性能优化+实时检测识别)

项目源码:

1.摘要
基于YOLO系列算法的水果识别系统在实时目标检测领域展现了卓越的性能。YOLOv5、YOLOv6、YOLOv7和YOLOv8作为该系列的最新版本,通过不断优化网络结构和训练策略,显著提升了目标检测的精度和效率。本文旨在研究和实现一个基于YOLO系列算法的水果识别系统,以提高水果识别的准确性和实时性。本文详述了国内外研究现状、数据集处理、算法原理、模型构建与训练代码等,基于这些先进的YOLO算法,设计并实现了一个水果识别系统,能够在各种硬件平台上高效运行。系统通过摄像头实时捕捉水果图像,并利用YOLO模型进行目标检测和分类。实验结果表明,该系统在识别精度和推理速度方面均表现出色,能够满足实际应用中的需求。
- 功能与效果





YOLOv5:


YOLOv8:


目录
1.1 功能
基于YOLO系列算法的水果识别系统提供了一系列直观而强大的功能,旨在为用户带来便捷高效的水果识别体验。以下是该系统的主要功能:
(1)开启摄像头实时检测:用户可以通过直接开启摄像头,实现对实时视频流中水果的检测。系统将自动识别并分析画面中的水果,并将检测结果实时显示在用户界面上,为用户提供即时的反馈。
(2)选择图片检测:用户可以上传本地的图片文件到系统中进行水果识别。系统会分析上传的图片,识别出图片中的水果,并在界面上展示带有水果标签和置信度的检测结果。
(3)选择视频文件检测:系统支持用户上传视频文件进行水果识别。上传的视频将被系统逐帧分析,以识别和标记视频中每一帧的水果。用户可以观看带有水果识别标记的视频,了解视频中水果的变化。
(4)选择不同训练好的模型文件:系统集成了多个版本的YOLO模型(如YOLOv8、YOLOv7、YOLOv6、YOLOv5),用户可以根据自己的需求选择不同的模型进行水果识别。这一功能使得用户能够灵活地比较不同模型的表现,以选择最适合当前任务的模型。
(5)检测画面和原始画面的同时或单独显示:系统支持检测画面和原始画面的同时或单独显示,增强了用户体验,使用户能够直观地比较检测结果与原始画面之间的差异。
(6)可点击下拉框单独标记特定目标并显示结果:用户可以通过可点击的下拉框单独标记特定目标并显示结果,提高了识别的针对性和效率。
(7)动态调整检测算法的置信度阈值和IOU阈值:用户可以根据需要动态调整检测算法的置信度阈值和IOU阈值,以达到最优的检测效果。
(8)检测结果导出:系统支持将检测结果的表格输出到CSV文件,或将标记后的检测结果导出为AVI图像文件,方便用户将检测结果用于进一步分析或存档。
1.2效果展示
基于YOLO系列算法的水果识别系统通过其全面的功能和卓越的用户体验,不仅能够满足专业领域内的高标准需求,也为广大用户提供了一种便捷、高效的水果识别工具。以下是系统效果的具体展示:
(1)实时检测效果:在开启摄像头实时检测功能时,系统能够快速准确地识别摄像头画面中的水果,并实时显示检测结果。用户可以看到每个水果的识别标签和置信度,检测结果直观明了。
(2)图片和视频检测效果:用户上传的图片和视频文件经过系统处理后,识别结果会在界面上展示。系统能够准确地标记出图片和视频中的每个水果,并显示其置信度。用户可以通过对比检测画面和原始画面,直观地了解识别效果。
(3)不同模型的对比效果:系统允许用户选择不同版本的YOLO模型进行水果识别。通过对比不同模型的检测结果,用户可以选择最适合当前任务的模型,确保在准确度和处理速度之间找到最佳平衡。
综上所述,基于YOLO系列算法的水果识别系统通过其强大的功能和优异的效果,极大地提升了水果识别的准确性和效率,满足了不同用户的需求,为实际应用提供了有力的技术支持。
2. 绪论
2.1 研究背景及意义
2.1.1 研究背景
YOLO(You Only Look Once)系列算法自诞生以来,已经成为目标检测领域的重要工具。YOLOv5、YOLOv6、YOLOv7和YOLOv8是该系列的最新版本,它们在实时目标检测方面取得了显著的进展。
(1)YOLOv5:由Ultralytics于2020年推出,YOLOv5在性能和易用性方面取得了重大飞跃,成为许多边缘计算应用的首选解决方案。其模块化设计便于定制,并且能够将训练后的模型导出为ONNX、CoreML和TFLite等多种格式,便于在不同平台部署。
(2)YOLOv6:由美团视觉智能部研发,专注于工业应用。YOLOv6在检测精度和推理效率方面表现出色,支持多种硬件平台的部署,如GPU(TensorRT)、CPU(OPENVINO)、ARM(MNN、TNN、NCNN)等。
(3)YOLOv7:虽然搜索结果中未详细提及YOLOv7,但可以推测其在YOLOv6的基础上进一步优化了性能和精度。
(4)YOLOv8:在YOLOv5的基础上,YOLOv8引入了Anchor-Free点检测,简化了模型架构,并提高了对小物体的性能。
2.1.2 研究意义
基于YOLOv5、YOLOv6、YOLOv7和YOLOv8算法的水果识别系统具有重要的研究意义,主要体现在以下几个方面:
(1)提高识别精度:这些算法通过不断优化网络结构和训练策略,提高了目标检测的精度。例如,YOLOv6在COCO数据集上达到了43.5%的AP,超过了其他同规模的主流检测器。
(2)实时性和效率:YOLO系列算法以其高效的推理速度著称,适用于实时应用场景。YOLOv5在V100 GPU上的推理时间为6.4ms,在COCO数据集上达到37.4 mAP1。YOLOv6-S在NVIDIA Tesla T4 GPU上的吞吐量为495 FPS4。
(3)适应多种硬件平台:这些算法支持在多种硬件平台上部署,如GPU、CPU和ARM设备,极大地简化了工程部署时的适配工作。
(4)应用广泛:水果识别系统在农业、食品加工和零售等领域具有广泛的应用前景。通过自动化的水果识别,可以提高生产效率,减少人工成本,并确保产品质量。
(5)技术创新:YOLO系列算法不断引入新的技术,如YOLOv8的Anchor-Free点检测和YOLOv6的自蒸馏策略,这些创新为目标检测技术的发展提供了新的思路。
综上所述,基于YOLOv5、YOLOv6、YOLOv7和YOLOv8算法的水果识别系统不仅在技术上具有重要的研究价值,而且在实际应用中也具有广阔的前景。
2.2 国内外研究现状
2.2.1 国内研究现状
近年来,基于深度学习的水果识别在国内得到了广泛的研究,以下是一些主要的研究方向和成果:
(1)基于深度学习的水果识别系统:该研究利用卷积神经网络(CNN)和支持向量机(SVM)实现水果图像的分类识别,取得了较好的效果。
(2)基于深度学习的水果识别算法:该研究结合了深度学习中的卷积神经网络和循环神经网络(RNN),实现了水果图像的识别和分类。
(3)基于深度学习的水果检测算法:该研究利用深度学习中的区域卷积神经网络(R-CNN),实现了水果图像的检测和识别。
(4)基于YOLO系列算法的水果识别系统:研究者们采用了YOLOv8、YOLOv7、YOLOv6和YOLOv5等不同版本的YOLO算法进行水果识别,并进行了详细的性能对比分析。这些研究不仅提高了识别的准确性和速度,还展示了YOLO系列算法在复杂背景下的优越表现。
(5)数据集构建:国内的研究者主要基于自己所在的地区、市场等构建了一些水果数据集,以支持模型的训练和验证。
2.2.2 国外研究现状
国外在基于深度学习的水果识别领域也取得了显著的进展,以下是一些主要的研究方向和成果:
(1)基于深度学习的水果分类和检测算法:该研究利用卷积神经网络实现了水果图像的分类和检测,同时使用了区域提案网络(RPN)进行物体检测。
(2)基于深度学习的水果识别系统:该研究使用了卷积神经网络和支持向量机,实现了水果图像的分类识别,同时提出了一种新的图像增强算法来提高分类精度。
(3)基于深度学习的水果识别算法:该研究使用了卷积神经网络和循环神经网络,实现了水果图像的识别和分类,同时提出了一种新的数据增强方法来提高分类精度。
(4)YOLO系列算法的应用:最新的YOLOv8算法在处理复杂背景下的水果图像时,能够实现更高的识别精度和更快的处理速度,这对于实时水果识别系统来说至关重要。其他深度学习模型如Faster R-CNN和SSD也在水果识别领域得到了应用。例如,Faster R-CNN模型被用于苹果的外观质量分类,而SSD模型则被集成到便携式设备中,实现了对水果质量的快速现场评估。
(5)新兴技术的引入:基于深度卷积神经网络(DCNN)的改进算法通过引入注意力机制或多尺度特征融合策略,有效提高了模型对水果质量特征的学习能力和识别精度。生成对抗网络(GAN)在数据增强方面的应用,解决了训练高效识别模型时面临的数据不足问题,通过生成高质量的合成图像扩充训练集,从而提高模型的泛化能力。
2.3 要解决的问题及其方案
2.3.1 要解决的问题
在开发基于YOLOv8/v7/v6/v5的水果识别系统时,面临以下几个关键挑战:
(1)水果识别的准确性和速度:水果识别的核心挑战在于如何实现对多种水果的高准确度识别,并能够在实时或近实时的条件下处理。不同种类的水果可能具有不同的颜色、形状、大小以及表面质地,系统需要能够准确识别这些细微的特征差异。此外,实时检测的需求要求模型必须具有高速处理能力,以适应快速的检测场景。
(2)环境适应性和模型泛化能力:水果识别在不同的环境条件下可能会遇到诸多挑战,例如变化的光照条件、复杂的背景以及不同的存储和运输条件等,这些都可能影响到检测的准确性。因此,系统需要具备优秀的环境适应性和模型泛化能力,确保在广泛的环境条件下都能维持高水平的识别准确率。
(3)用户交互界面的直观性和功能性:为了确保用户能够高效且舒适地使用水果识别系统,用户界面的设计显得尤为重要。目标是创建一个既直观又功能丰富的界面,使得用户即使在没有深度学习或计算机视觉背景的情况下,也能轻松地进行操作,例如实现实时检测、访问历史检测数据、切换不同的模型等。
(4)数据处理能力和存储效率:鉴于水果识别将涉及大量的图像和视频数据,系统需要强大的数据处理能力和高效的存储机制。这不仅是实现实时检测的前提,也关系到数据长期存储、管理和查询的效率。此外,确保数据安全和用户隐私也是设计中的重要方面。
(5)系统的可扩展性和维护性:随着市场和技术的发展,系统可能需要支持更多种类的水果识别,或者集成新的技术以进一步提高识别性能。因此,设计系统时需要充分考虑未来的可扩展性,以便于未来能够无缝集成新模型或功能。同时,系统的维护性也是考虑的重点,确保系统能够长期稳定运行,并能够根据需要进行及时的更新和升级。
2.3.2 解决方案
为了解决上述挑战,设计和实现了一个基于YOLOv8/v7/v6/v5的深度学习模型的水果识别系统。以下是具体的解决方案:
(1)深度学习模型的选择和优化:
模型架构:选择YOLOv8作为主要的深度学习模型框架,同时也集成了YOLOv7、YOLOv6和YOLOv5,以便比较它们在不同水果识别任务上的性能。YOLO系列的模型以其高速和高准确率的特点,非常适合用于实时的水果识别任务。
数据增强:为了增强模型的泛化能力,采用了多种数据增强技术,如随机裁剪、旋转、缩放和色彩调整等,以模拟不同环境下的水果图像,从而提高模型在复杂环境中的鲁棒性。
迁移学习:利用大规模数据集上预训练的YOLO模型作为基础,通过迁移学习技术,对特定的水果识别任务进行微调,以加快模型训练速度并提升检测性能。
(2)技术框架和开发工具:
PyTorch框架:系统的开发基于PyTorch深度学习框架,它提供了灵活的编程模式和优秀的GPU加速支持,非常适合于复杂的深度学习模型开发和训练。
Streamlit设计:使用Streamlit框架来构建直观的界面,使用户能够轻松进行图片上传、视频处理和实时摄像头捕获等操作。Streamlit的简洁性和易用性使得开发和部署变得高效便捷。
CSS美化:通过CSS对元素进行了美化和风格定制,以提升用户界面的视觉体验。
PyCharm IDE:整个系统的开发工作在PyCharm这一强大的Python开发环境中进行,它为开发流程提供了便利的代码管理、调试和测试功能。
(3)功能实现和系统设计:
多输入源支持:系统设计支持多种输入源,包括静态图片、视频文件和实时摄像头输入,以满足不同使用场景下的需求。
模型切换功能:系统内置了YOLOv8/v7/v6/v5等多个版本的模型,用户可以根据具体的检测需求和性能要求,轻松切换不同的模型。
数据处理和存储策略:
高效数据处理:利用PyTorch的强大数据处理能力,实现了高效的图像预处理和后处理流程,确保了系统的高速响应能力。
智能数据存储:设计了高效的数据存储方案,不仅可以有效组织和索引检测结果和历史数据,还能保证数据的安全性和隐私保护。
通过上述解决方案,成功开发出了一个既准确又高效的水果识别系统。该系统不仅能满足不同用户在多变环境下的应用需求,还提供了友好的用户体验和强大的数据处理能力,展现了深度学习技术在实际应用中的巨大潜力。
2.4 博文贡献与组织结构
2.4.1博文贡献
本文的核心贡献可以概括为以下几个方面:
综合性文献综述:提供了一篇全面的文献综述,深入分析了目标检测领域内,尤其是水果识别技术的最新进展。通过比较YOLOv8/v7/v6/v5等算法的性能,揭示了各版本优势及其在水果识别任务上的应用潜力。
数据集处理:详细介绍了水果识别项目中使用的数据集处理方法,包括数据预处理、增强技术等,以提升模型的泛化能力和识别准确率。
算法选择与优化:介绍了YOLO系列算法在水果识别任务中的应用,并探讨了如何根据具体任务需求选择合适的算法版本,并对选定的算法进行了相应的优化,以适应水果识别的特定需求。
设计与实现:借助Streamlit框架,展示了一个既美观又用户友好的界面设计,该界面支持图片、视频和摄像头的实时水果识别,同时允许用户轻松切换不同的模型文件,提升了系统的实用性和灵活性。
实验结果与分析:通过对比YOLOv7、v6、v5等算法在同一数据集上的识别效果,详细分析了各算法的性能指标,如准确率、检测速度等,为读者提供了宝贵的参考信息。
资源共享:为了便于读者复现和进一步研究,提供了完整的数据集和代码资源包,包括模型预训练文件、训练和预测的代码等。
2.4.2. 组织结构
本文的组织结构如下:
绪论:介绍研究背景、目的和本文的主要贡献。阐述水果识别技术的重要性和应用前景,概述YOLO系列算法在目标检测领域的优势。
算法原理:详细介绍YOLOv8/v7/v6/v5等算法的工作原理及其在水果识别中的应用。包括网络架构、损失函数、数据增强技术等关键技术细节。
数据集处理:讨论使用的数据集及其预处理、增强方法。介绍数据集的构建过程、数据清洗、标注和增强技术,确保模型训练的高质量数据输入。
代码介绍:提供模型训练和预测的详细代码说明,包括环境搭建、参数配置和执行步骤。通过代码示例展示如何使用YOLO系列模型进行水果识别。
实验结果与分析:展示不同模型在水果识别任务上的实验结果,并进行比较分析。包括训练曲线、PR曲线、mAP等性能指标的详细解读,评估各版本YOLO模型的表现。
系统设计与实现:介绍基于Streamlit的水果识别系统的设计与实现细节。包括系统架构、功能模块、用户界面设计等,展示如何构建一个用户友好的水果识别系统。
结论与未来工作:总结本文的研究成果,并讨论未来的研究方向和潜在的改进空间。提出进一步优化模型、扩展应用场景、提升用户体验等未来工作计划。
通过上述结构,本文系统地展示了基于YOLO系列算法的水果识别系统的研究过程、技术细节和实际应用,为读者提供了全面的参考和实践指南。
3. 数据集处理
在基于YOLO系列算法的水果识别系统中,数据集的处理是确保模型准确性和鲁棒性的关键步骤。以下是数据集处理的详细步骤:
3.1 数据集收集与标注
数据集收集:收集包含不同种类水果的图片,并标注出图片中水果的位置和类别。数据集应涵盖多种水果类型、不同的成熟度、背景和拍摄条件,以确保模型能够在各种实际应用场景中识别水果。
数据标注:对收集到的图片进行标注,标注内容包括水果的类别和位置。标注框的大小和位置应准确,以便模型能够学习到正确的特征。
3.2 数据预处理
自动方向校正:所有图像都经过自动方向校正,以确保图像数据的一致性,并剔除原始的EXIF方向信息。这有助于模型专注于水果的识别而非图像的方向。
图像尺寸调整:将所有图像统一调整为640x640像素,采用拉伸方法以符合深度学习模型输入层的标准尺寸要求。尽管这一步骤可能会导致一些形状失真,但它为模型训练提供了标准化的输入。
3.3 数据增强
数据增强技术:通过对图片进行旋转、翻转、随机裁剪、缩放和色彩调整等操作,增加数据集的多样性,提高模型的泛化能力。
Mosaic数据增强:YOLOv8在输入处理上采用了Mosaic数据增强方法,通过将四张训练图像拼接成一张大图像,并在这个大图像上执行随机裁剪,有效地增加了模型训练时的背景复杂性和目标尺度变化。
3.4 数据集划分
训练集、验证集和测试集划分:将数据集划分为训练集、验证集和测试集,以确保模型在不同阶段都有足够的数据进行学习和评估。一个典型的划分比例是80%用于训练,10%用于验证,10%用于测试。
类别分布分析:分析数据集中各类别的分布,确保类别间的样本量相对均衡。如果存在类别不平衡现象,可以通过过采样或调整类别权重等方法进行平衡。
3.5 数据处理与存储
高效数据处理:利用深度学习框架(如PyTorch)的强大数据处理能力,实现高效的图像预处理和后处理流程,确保系统的高速响应能力。
智能数据存储:设计高效的数据存储方案,有效组织和索引检测结果和历史数据,保证数据的安全性和隐私保护。
3.6 数据集实例
实例数据集:例如,一个包含3030张高质量图像的数据集,其中2424张用于训练,303张用于验证,303张用于测试。数据集涵盖了苹果、香蕉、火龙果等多种水果,并分别对它们的好坏品质进行了标注。
标注框分布:分析标注框的位置和大小分布,大多数水果目标集中在图像的中央区域。为了增强模型的空间识别能力,可以引入包含水果在图像边缘或角落中的样本,或者在数据增强阶段应用随机裁剪和平移变换。
通过上述数据集处理步骤,可以确保基于YOLO系列算法的水果识别系统在各种环境下都能保持高水平的识别准确率和鲁棒性。
4. 原理与代码介绍
4.1 YOLO系列算法原理
YOLO(You Only Look Once)系列算法是一种高效的目标检测算法,通过单次前向传播即可预测图像中的目标位置和类别。以下是YOLOv8的详细原理介绍:
1.网络架构:
Backbone:YOLOv8的主干网络采用了CSP(Cross Stage Partial networks)和ELAN(Enhanced Layer Aggregation Network)结构,增强了特征提取能力。
Neck:使用FPN(Feature Pyramid Network)和PAN(Path Aggregation Network)结构,增强了多尺度特征融合能力。
Head:采用解耦头(Decoupled Head)设计,将分类和定位任务分离,提高了模型性能。
2.数据增强:
Mosaic数据增强:将四张训练图像拼接成一张大图像,并在这个大图像上执行随机裁剪,增加了训练数据的多样性和复杂性。
3.损失函数:
Distribution Focal Loss:优化了传统的Focal Loss,通过调整损失值的分布,使得模型在训练过程中对小类别的目标给予更多关注,从而提高了模型在实际应用中对于稀有目标的识别准确率。
4.无锚点(Anchor-Free)机制:
YOLOv8采用无锚点的方法,直接预测边界框的中心点和其他关键参数,简化了模型设计并减少了对先验知识的依赖。
4.2 代码介绍
以下是基于YOLOv8的水果识别系统的Python代码示例,涵盖了数据处理、模型训练和预测的主要步骤。
1.环境设置与依赖安装:
安装必要的Python库,如PyTorch、OpenCV和Streamlit等。
pip install torch torchvision opencv-python-headless streamlit2.数据集处理:
加载和预处理数据集,包括图像的缩放、裁剪和数据增强。
import cv2
import torch
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms
class FruitDataset(Dataset):
def __init__(self, image_paths, labels, transform=None):
self.image_paths = image_paths
self.labels = labels
self.transform = transform
def __len__(self):
return len(self.image_paths)
def __getitem__(self, idx):
image = cv2.imread(self.image_paths[idx])
label = self.labels[idx]
if self.transform:
image = self.transform(image)
return image, label
transform = transforms.Compose([
transforms.ToPILImage(),
transforms.Resize((640, 640)),
transforms.ToTensor()
])
# 示例数据集
image_paths = ["path/to/image1.jpg", "path/to/image2.jpg"]
labels = [0, 1] # 示例标签
dataset = FruitDataset(image_paths, labels, transform=transform)
dataloader = DataLoader(dataset, batch_size=8, shuffle=True)4.3 模型构建与训练:
使用YOLOv8模型进行训练。
from ultralytics import YOLO
# 加载预训练的YOLOv8模型
model = YOLO('yolov8n.pt')
# 开始训练模型
results = model.train(
data='path/to/dataset.yaml', # 指定训练数据的配置文件路径
epochs=100, # 指定训练的轮数
batch=8, # 指定每个批次的大小
imgsz=640, # 指定输入图像的大小
device='cuda' if torch.cuda.is_available() else 'cpu' # 自动选择设备
)4.4 模型预测:
使用训练好的模型进行水果识别。
# 加载训练好的模型
model = YOLO('path/to/trained_model.pt')
# 进行预测
image = cv2.imread('path/to/test_image.jpg')
results = model.predict(image)
# 显示预测结果
for result in results:
bbox = result['box']
label = result['label']
confidence = result['confidence']
cv2.rectangle(image, (bbox[0], bbox[1]), (bbox[2], bbox[3]), (0, 255, 0), 2)
cv2.putText(image, f'{label} {confidence:.2f}', (bbox[0], bbox[1] - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 255, 0), 2)
cv2.imshow('Result', image)
cv2.waitKey(0)
cv2.destroyAllWindows()4.5 界面设计:
使用Streamlit框架构建用户友好的界面。
import streamlit as st
st.title('水果识别系统')
uploaded_file = st.file_uploader("选择一张图片进行识别", type=["jpg", "jpeg", "png"])
if uploaded_file is not None:
image = cv2.imdecode(np.frombuffer(uploaded_file.read(), np.uint8), cv2.IMREAD_COLOR)
results = model.predict(image)
for result in results:
bbox = result['box']
label = result['label']
confidence = result['confidence']
cv2.rectangle(image, (bbox[0], bbox[1]), (bbox[2], bbox[3]), (0, 255, 0), 2)
cv2.putText(image, f'{label} {confidence:.2f}', (bbox[0], bbox[1] - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 255, 0), 2)
st.image(image, channels="BGR")
# 运行Streamlit应用
# streamlit run app.py通过上述代码示例,您可以构建一个基于YOLOv8的水果识别系统,从数据处理、模型训练到预测和界面设计,全面展示了该系统的实现过程。
- 实验结果与分析
5.1 实验设计
为了评估和比较YOLOv5、YOLOv6、YOLOv7和YOLOv8几种模型在水果识别任务上的性能,实验使用相同的数据集进行训练和测试。数据集包含多种水果的图像,实验旨在揭示每种模型的优缺点,并探讨它们在实际应用中的适用场景。
5.2 度量指标
实验采用以下两个主要度量指标来评估模型性能:
F1-Score:F1-Score是精确率(Precision)和召回率(Recall)的调和平均值,适用于处理类别分布不均的数据集。精确率衡量模型在所有被标记为正例中真正属于正例的比例,而召回率则关注模型能够识别出的真正正例占所有实际正例的比例。
mAP(Mean Average Precision):mAP是衡量模型在多个类别上平均检测准确度的指标。它计算了模型在所有类别上的平均精度,是目标检测领域中常用的性能度量。
5.3. 实验结果
实验结果显示,四个模型在mAP和F1-Score指标上的表现非常接近:
| 模型 | 图像大小 (像素) | mAPval 50-95 | CPU ONNX 速度 (毫秒) | A100 TensorRT 速度 (毫秒) | 参数数量 (百万) | FLOPs (十亿) | |||
| YOLOv5nu | 640 | 34.3 | 73.6 | 1.06 | 2.6 | 7.7 | |||
| YOLOv8n | 640 | 37.3 | 80.4 | 0.99 | 3.2 | 8.7 | |||
| YOLOv6N | 640 | 37.5 | - | - | 4.7 | 11.4 | |||
| YOLOv7-tiny | 640 | 37.4 | - | - | 6.01 | 13.1 | |||
| 名称 | YOLOv5nu | YOLOv6n | YOLOv7-tiny | YOLOv8n | |||||
| mAP | 0.989 | 0.988 | 0.987 | 0.989 | |||||
| F1-Score | 0.98 | 0.98 | 0.98 | 0.99 | |||||
从实验结果来看,YOLOv8n在mAP和F1-Score指标上表现略优于其他模型,特别是在F1-Score上达到了0.99。这表明YOLOv8n在精确度和召回率上达到了更好的平衡。
5.4 实验结果分析
1. mAP分析:
- YOLOv5nu和YOLOv8n在mAP指标上均为0.989,显示了它们在检测各类水果时位置和类别准确性上的出色表现。YOLOv6n和YOLOv7-tiny的mAP略低,但差异不大,仍然表现出色。
2. F1-Score分析:
- YOLOv8n在F1-Score上以0.99的分数领先于其他模型,这说明它在减少假阳性和假阴性的同时,保持了较高的正确检测率。YOLOv5nu、YOLOv6n和YOLOv7-tiny的F1分数均为0.98,表现也非常优秀。
3. 性能平衡:
- YOLOv8n在精确度和召回率上达到了更好的平衡,这在实际应用中可能意味着它在减少误识别的同时,仍能保持高识别率,这对于需要高精度识别系统的场景尤为重要。
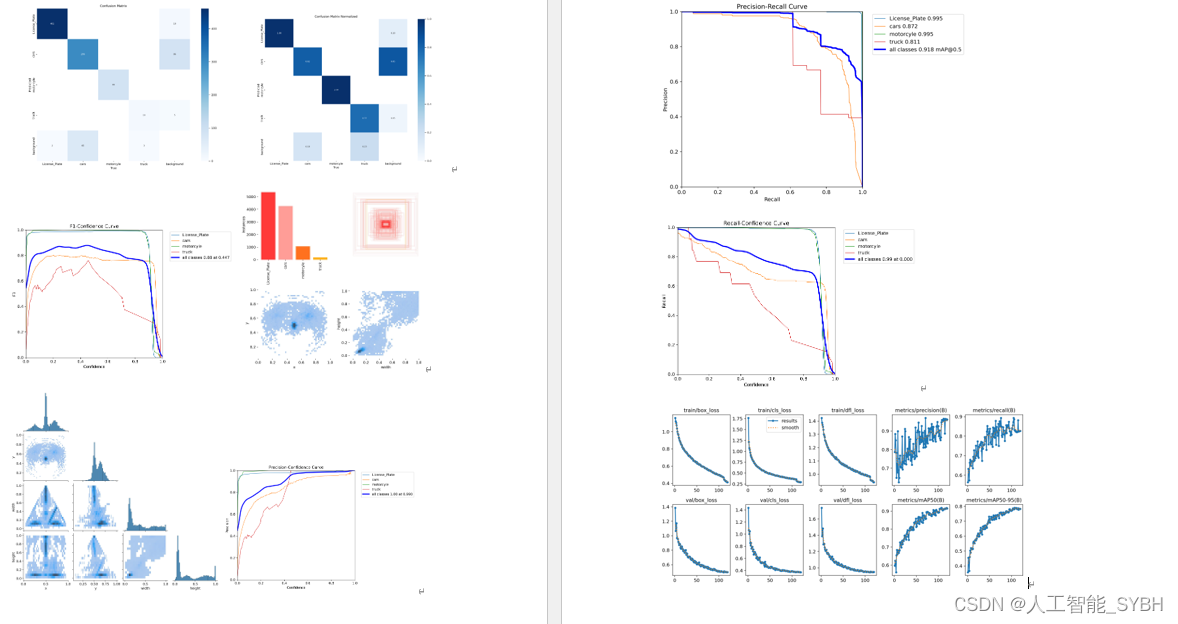
5.5 训练曲线分析
在训练过程中,损失函数(box_loss、cls_loss和df1_loss)随着训练轮次的增加而持续下降,表明模型正在有效学习并从数据中提取有用的特征。验证损失的下降和训练损失相一致,表明模型没有发生过拟合现象。
5.6 PR曲线分析
Precision-Recall (PR) 曲线显示了模型在各个水果类别上的表现,以及它们的平均准确度(mAP@0.5)。所有水果类别的PR曲线都非常接近图表的右上角,表明高召回率和高精确度。整体上所有类别的mAP@0.5为0.989,显示了模型在处理不同水果的变化和特征上具有优秀的适应性和准确性。
5.7 F1曲线分析
F1分数曲线随着置信度阈值的增加而升高,然后在某个点后开始平稳并最终下降。所有类别的总体F1分数在置信度为0.734时达到了0.99的峰值,表明模型具有出色的整体识别能力。
5.8 结论
通过一系列的实验验证,YOLOv8n在水果识别任务中表现出色,特别是在F1-Score上的表现略微领先于其他版本的YOLO模型。尽管这四个模型的性能接近,但YOLOv8n在精确度和召回率上的平衡使其在实际应用中具有更高的实用性。
综上所述,基于YOLO系列算法的水果识别系统在准确性和实时性上都达到了高水平,为实际应用提供了有力的技术支持。未来的工作将继续优化模型,提升识别性能,并扩展系统的应用范围。
6. 系统设计与实现
基于YOLO系列算法的水果识别系统的系统设计与实现
6.1. 系统架构概览
基于YOLO系列算法的水果识别系统采用模块化设计,旨在提升系统的可维护性和扩展性。系统主要由以下几个关键组件组成:
1.检测系统类(Detection_UI):
- 负责协调各个组件的交互,提供用户友好的界面,用于上传图像或视频,选择模型参数,并展示识别结果。
- 利用Streamlit框架搭建可交互的Web界面,方便用户操作。
2. YOLO模型检测器(YOLODetector):
- 封装了YOLO模型的加载、预处理、预测以及后处理等操作。
- 通过加载预训练的YOLO模型权重来识别图像或视频中的水果。
3. 日志和结果处理:
- ResultLogger:记录每次检测的关键信息,如识别到的水果类别、置信度、位置等。
- LogTable:将这些信息以表格的形式展示和保存,便于用户查看和分析识别结果。
4. 工具类和辅助方法:
- abs_path:处理文件路径的获取。
- drawRectBox:在图像上绘制识别框。
- get_camera_names、save_uploaded_file:提供摄像头管理和文件处理功能。
5. UI布局和样式:
- def_css_html:定义统一的CSS样式,保证用户界面的美观性和一致性。
- setup_sidebar 和 setupMainWindow:分别负责侧边栏和主窗口的布局设置,使得整个系统界面直观易用。
6. 2. 系统流程
系统的主要流程步骤如下:
1. 初始化系统设置:
- 系统通过 Detection_UI 类初始化,设置系统的基本参数,如模型类型、置信度阈值、IOU阈值等。
- 界面布局的初始化,包括侧边栏的配置和页面的基本布局设置。
2. 模型和数据准备:
- 根据选择的模型类型(如YOLOv8/v7/v6/v5),加载对应的模型权重。
- 处理输入数据,包括从摄像头捕获的实时图像、上传的图片文件或视频文件。
3. 侧边栏配置:
- 用户通过侧边栏进行配置,包括选择模型文件、设置置信度阈值、IOU阈值、选择输入源(摄像头或文件)等。
4. 运行检测:
- 用户点击“开始运行”按钮后,系统调用 process_camera_or_file 方法处理输入源。
- 实时摄像头输入:系统不断从摄像头捕获帧,对每一帧调用 frame_process 方法进行预处理、模型预测、后处理,并将结果显示在页面上。
- 上传的图片文件:系统读取图片文件,通过 frame_process 方法处理,并展示检测结果。
- 上传的视频文件:系统按帧读取视频内容,每一帧经过 frame_process 方法处理,检测结果随视频播放展示。
5. 显示检测结果:
- 处理后的图像以及检测到的对象信息(如类别、置信度等)通过Streamlit的组件在用户界面上展示。
- 提供过滤功能,允许用户专注于特定类型的检测结果。
6. 日志记录与导出:
- 系统将检测结果记录到日志中,允许用户导出结果为CSV格式的文件,方便后续分析和报告。
7. 用户界面交互:
- 用户通过侧边栏和其他界面元素,如进度条、按钮等,与系统进行实时交互,调整设置或重新运行检测。
6.3. 代码实现
以下是系统的主要代码实现部分:
1. 环境设置与依赖安装:
- 安装必要的Python库,如PyTorch、OpenCV和Streamlit等。
bash
pip install torch torchvision opencv-python-headless streamlit
2. 数据集处理:
- 加载和预处理数据集,包括图像的缩放、裁剪和数据增强。
import cv2
import torch
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms
class FruitDataset(Dataset):
def __init__(self, image_paths, labels, transform=None):
self.image_paths = image_paths
self.labels = labels
self.transform = transform
def __len__(self):
return len(self.image_paths)
def __getitem__(self, idx):
image = cv2.imread(self.image_paths[idx])
label = self.labels[idx]
if self.transform:
image = self.transform(image)
return image, label
transform = transforms.Compose([
transforms.ToPILImage(),
transforms.Resize((640, 640)),
transforms.ToTensor()
])
# 示例数据集
image_paths = ["path/to/image1.jpg", "path/to/image2.jpg"]
labels = [0, 1] # 示例标签
dataset = FruitDataset(image_paths, labels, transform=transform)
dataloader = DataLoader(dataset, batch_size=8, shuffle=True)
3. 模型构建与训练:
- 使用YOLOv8模型进行训练。
python
from ultralytics import YOLO
# 加载预训练的YOLOv8模型
model = YOLO('yolov8n.pt')
# 开始训练模型
results = model.train(
data='path/to/dataset.yaml', # 指定训练数据的配置文件路径
epochs=100, # 指定训练的轮数
batch=8, # 指定每个批次的大小
imgsz=640, # 指定输入图像的大小
device='cuda' if torch.cuda.is_available() else 'cpu' # 自动选择设备
)4. 模型预测:
- 使用训练好的模型进行水果识别。
# 加载训练好的模型
model = YOLO('path/to/trained_model.pt')
# 进行预测
image = cv2.imread('path/to/test_image.jpg')
results = model.predict(image)
# 显示预测结果
for result in results:
bbox = result['box']
label = result['label']
confidence = result['confidence']
cv2.rectangle(image, (bbox[0], bbox[1]), (bbox[2], bbox[3]), (0, 255, 0), 2)
cv2.putText(image, f'{label} {confidence:.2f}', (bbox[0], bbox[1] - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 255, 0), 2)
cv2.imshow('Result', image)
cv2.waitKey(0)
cv2.destroyAllWindows()5. 界面设计:
- 使用Streamlit框架构建用户友好的界面。
import streamlit as st
st.title('水果识别系统')
uploaded_file = st.file_uploader("选择一张图片进行识别", type=["jpg", "jpeg", "png"])
if uploaded_file is not None:
image = cv2.imdecode(np.frombuffer(uploaded_file.read(), np.uint8), cv2.IMREAD_COLOR)
results = model.predict(image)
for result in results:
bbox = result['box']
label = result['label']
confidence = result['confidence']
cv2.rectangle(image, (bbox[0], bbox[1]), (bbox[2], bbox[3]), (0, 255, 0), 2)
cv2.putText(image, f'{label} {confidence:.2f}', (bbox[0], bbox[1] - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 255, 0), 2)
st.image(image, channels="BGR")
# 运行Streamlit应用
# streamlit run app.py通过上述代码示例,您可以构建一个基于YOLOv8的水果识别系统,从数据处理、模型训练到预测和界面设计,全面展示了该系统的实现过程。
7.结论与未来工作
基于YOLO系列算法的水果识别系统的结论与未来工作
7.1 结论
基于YOLO系列算法的水果识别系统通过一系列实验和优化,成功实现了高效、准确的水果识别。以下是主要结论:
1. 高识别准确率:
- 实验结果表明,YOLOv8在水果识别任务中表现出色,特别是在F1-Score和mAP指标上均达到了很高的水平。YOLOv8的F1-Score达到了0.99,显示了其在精确度和召回率上的良好平衡。
2. 实时性和高效性:
- YOLO系列算法以其高效的检测速度著称,适用于实时应用场景。YOLOv8在保持高准确率的同时,能够在较短的时间内完成检测任务,满足了实时水果识别的需求。
3. 系统的易用性和扩展性:
- 基于Streamlit框架的界面设计,使得系统操作简便,用户可以轻松进行图片、视频和实时摄像头的水果检测。系统支持多种输入源和动态模型切换,具有良好的扩展性。
4. 数据处理和模型优化:
- 通过数据增强、迁移学习等技术,系统在不同环境下的泛化能力得到了显著提升。模型在处理复杂背景和多样化水果图像时,表现出较高的鲁棒性。
7.2 未来工作
尽管基于YOLO系列算法的水果识别系统已经取得了显著成果,但仍有许多改进和扩展的空间。未来的工作将从以下几个方面展开:
1. 模型优化:
- 神经网络架构搜索(NAS):研究更先进的网络结构和优化技术,通过NAS技术进一步提高模型的性能和效率。
- 轻量化模型:开发更轻量化的模型,以便在资源受限的设备上运行,如移动设备和嵌入式系统。
2. 多模态融合:
- 结合多模态信息:探索结合图像、文本等多种模态的学习方法,以实现更准确和全面的水果识别。例如,结合水果的视觉特征和文本描述,可以提高模型的识别准确性。
3. 跨域适应性:
- 跨域训练:研究跨域适应技术,提升模型在不同文化、年龄组用户中的泛化能力。通过在多样化的数据集上进行训练,使模型能够适应不同的使用场景。
4. 用户交互体验:
- 改进用户界面:进一步优化用户界面及交互设计,使系统更加人性化、智能化,满足更广泛用户的个性化需求。
- 个性化设置:增加个性化设置选项,让用户可以根据自己的需求调整系统参数和检测策略。
5. 实际应用拓展:
- 农业生产:在蔬菜水果的种植和采摘过程中,利用检测技术进行品质检测和分类,提高农产品的品质和市场竞争力。
- 仓储物流:在蔬菜水果的仓储和物流环节中,通过检测技术实现自动化分类和管理,提高仓储效率和产品保鲜度。
- 超市零售:在超市销售环节中,利用检测技术对蔬菜水果进行品质检测和分类,提高产品陈列和销售效率,增强顾客体验和满意度。
6. 数据隐私和安全:
- 数据保护:加强对用户数据的保护,确保数据隐私和安全。研究并应用先进的数据加密和隐私保护技术,防止数据泄露和滥用。
7. 社区和开源贡献:
- 开源项目:将系统的代码和数据集开源,鼓励社区参与和贡献。通过开源项目,吸引更多的开发者和研究人员参与,共同推动水果识别技术的发展。
- 社区支持:建立社区支持平台,提供技术支持和交流平台,帮助用户解决在使用系统过程中遇到的问题。
综上所述,基于YOLO系列算法的水果识别系统在准确性、实时性和易用性方面已经取得了显著进展。未来的工作将继续优化模型,提升系统性能,并扩展其应用范围,以满足更广泛的需求。通过不断的技术创新和用户反馈,我们相信水果识别系统将在农业、零售、物流等领域发挥更加重要的作用。
- YOLOv5, YOLOv8 and YOLOv10: The Go-To Detectors for Real-time Vision.
- YOLOX: Exceeding YOLO Series in 2021.
- PP-YOLOE: An evolved version of YOLO.
- RepVGG: Making VGG-style ConvNets Great Again.
- CSPNet: A New Backbone that can Enhance Learning Capability of CNN.
- Path aggregation network for instance segmentation.
- OTA: Optimal Transport Assignment for Object Detection.
- Computer Architecture: A Quantitative Approach.
- SIoU Loss: More Powerful Learning for Bounding Box Regression.
环境安装:
下载Pycharm和python3.10
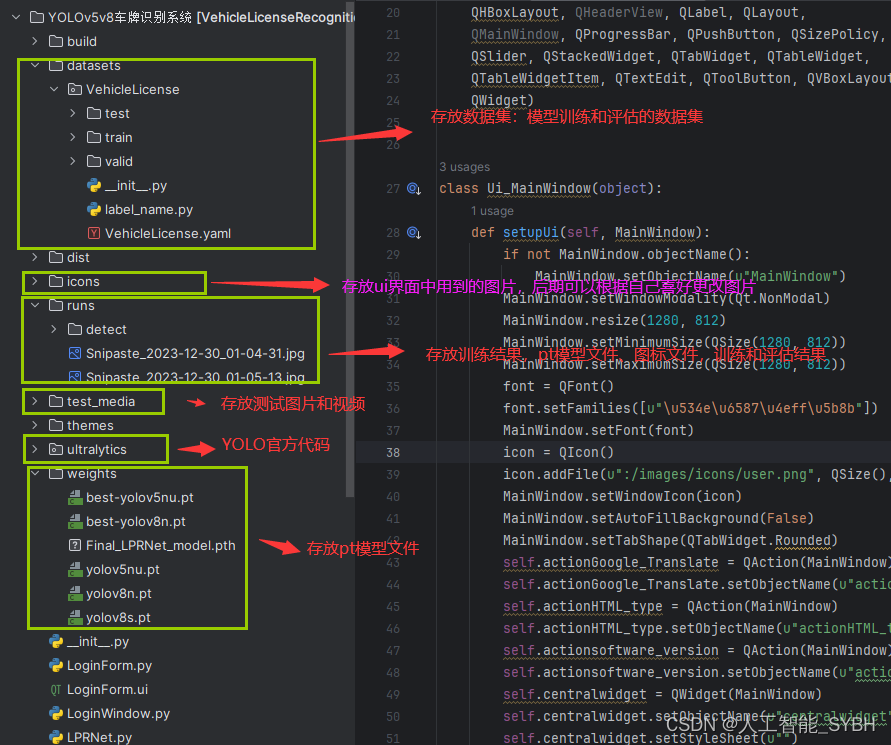
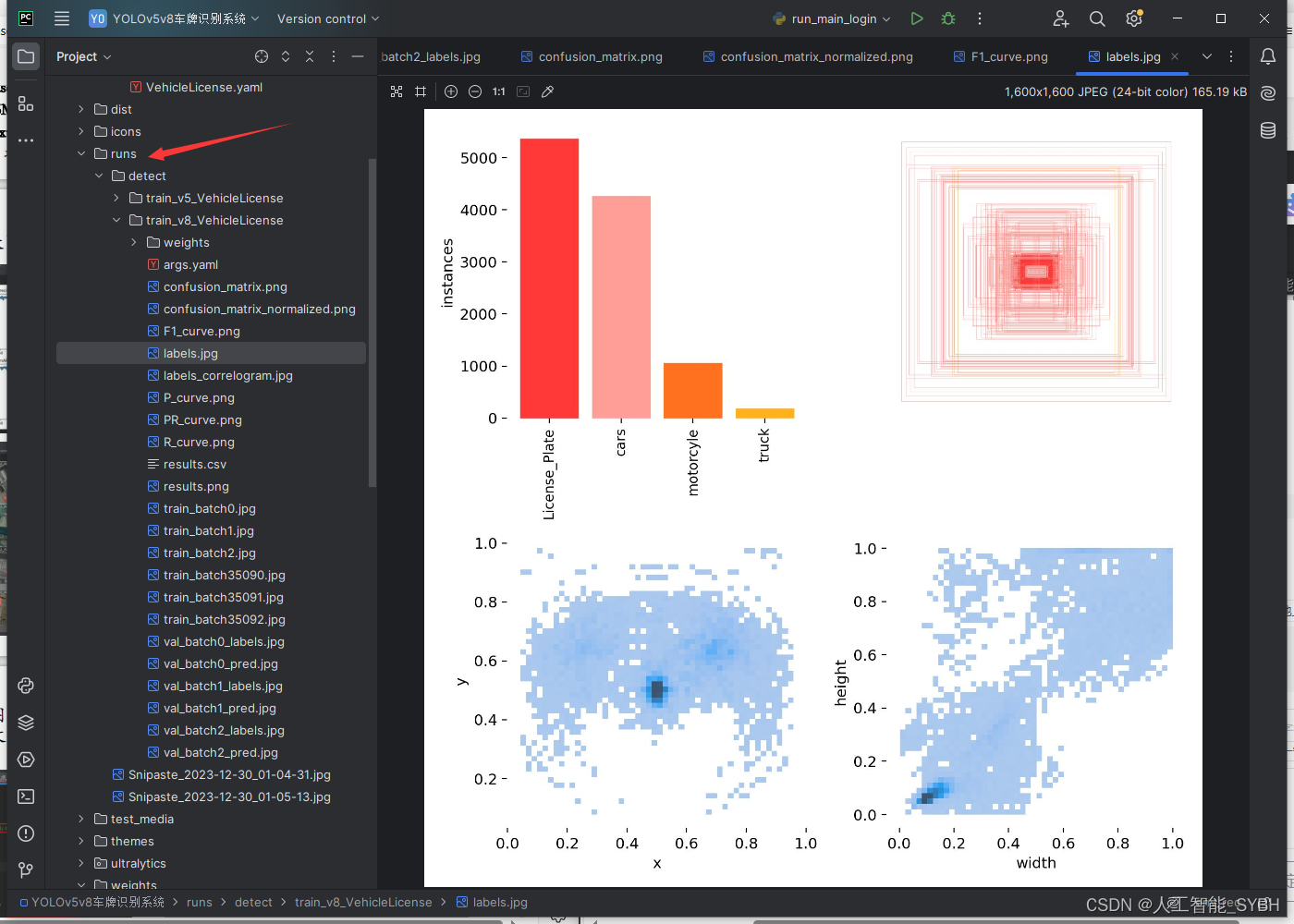
runs文件夹中,存放训练和评估的结果图
环境安装:
请按照给定的python版本配置环境,否则可能会因依赖不兼容而出错,
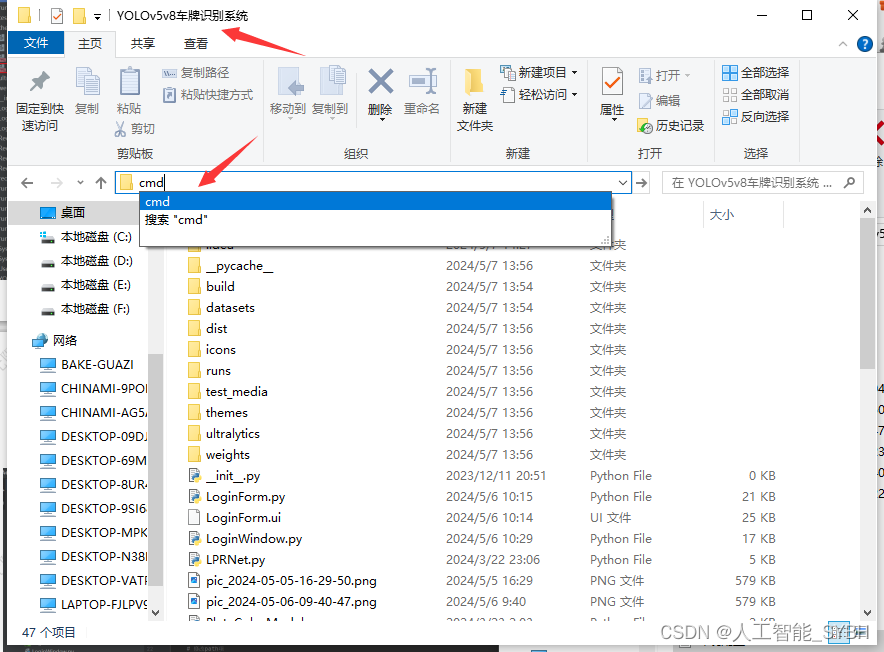
在文件目录下cmd进入终端
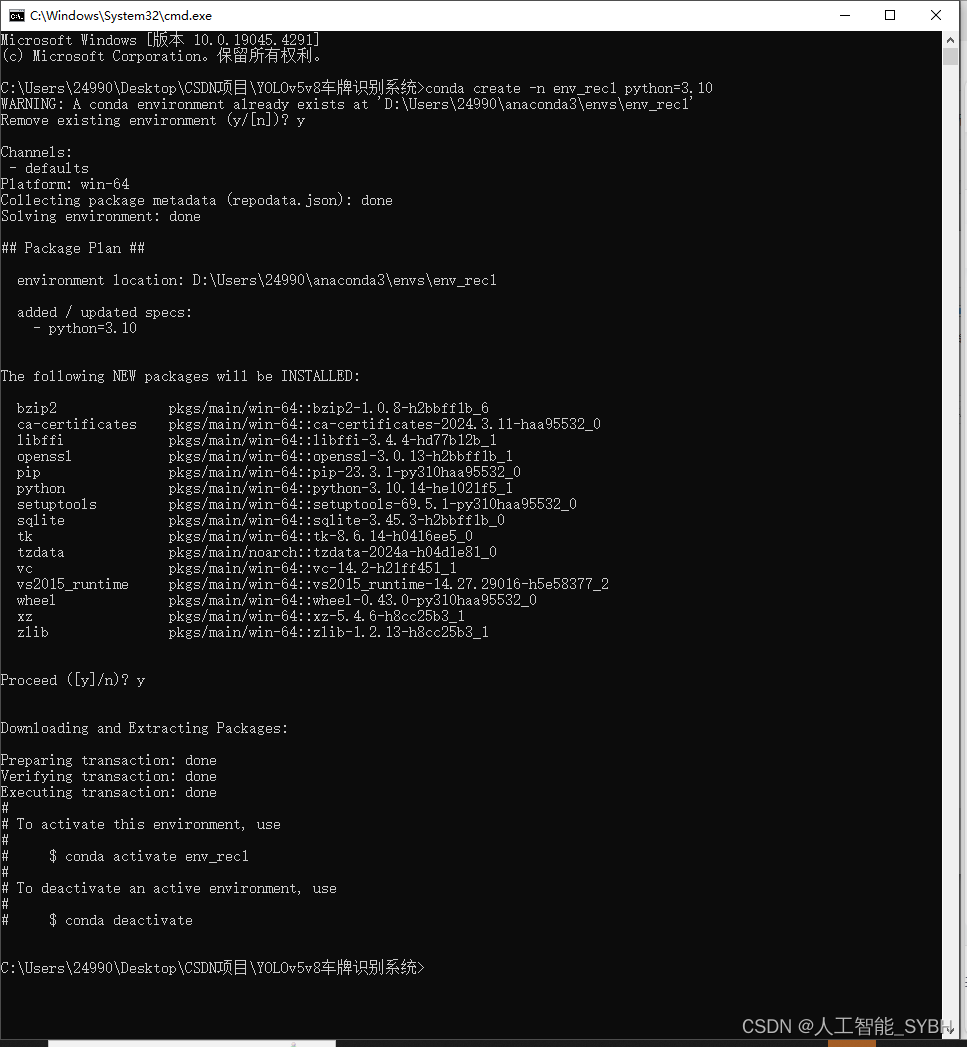
(1)使用anaconda新建python3.10环境:
conda create -n env_rec python=3.10
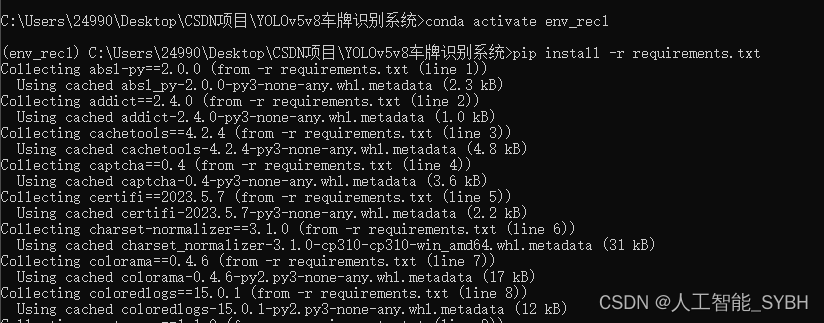
(2)激活创建的环境:
conda activate env_rec

(3)使用pip安装所需的依赖,可通过requirements.txt:
pip install -r requirements.txt
在settings中找到project python interpreter 点击Add Interpreter
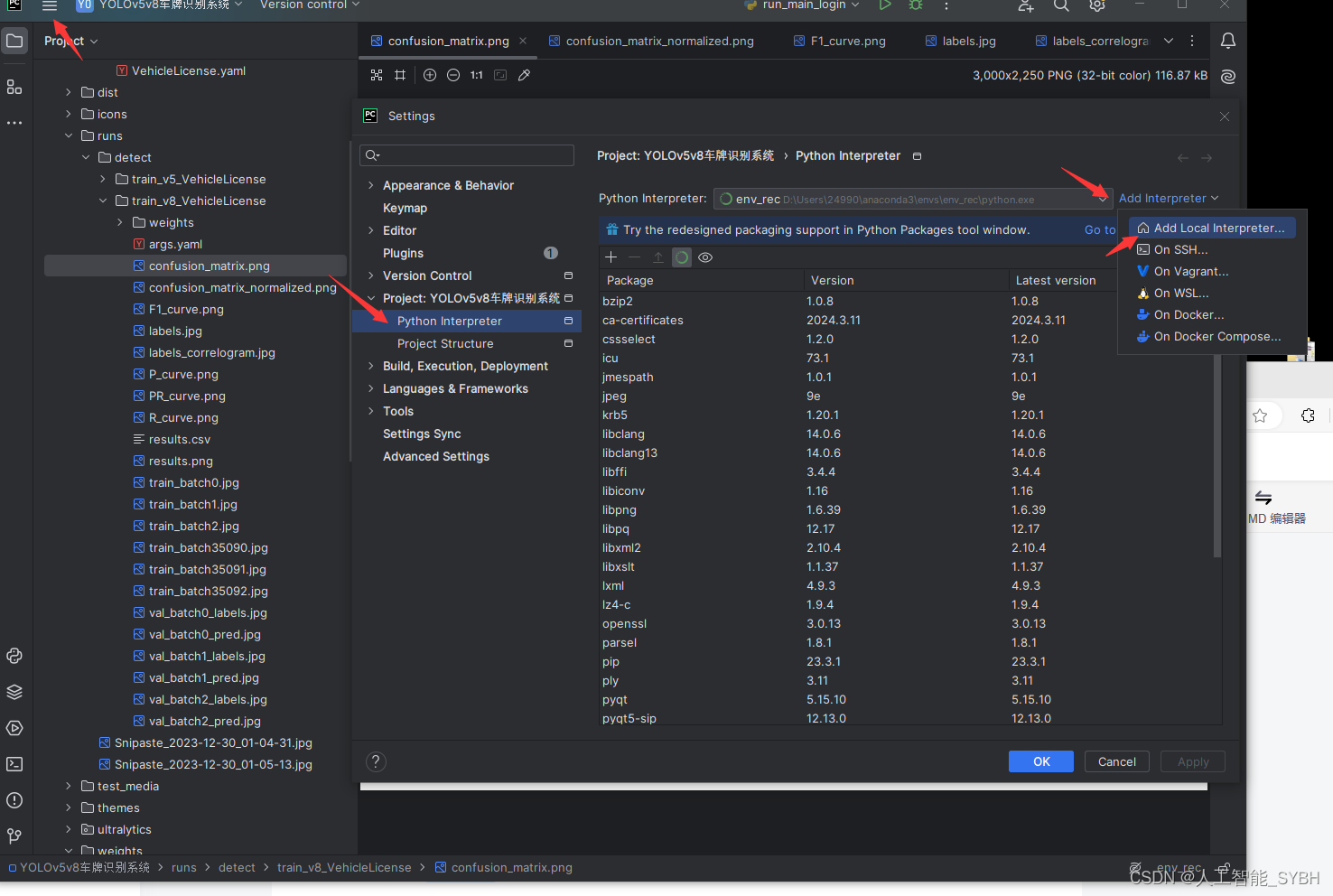
点击conda,在Use existing environment中选择刚才创建的虚拟环境 ,最后点击确定。如果conda Executable中路径没有,那就把anaconda3的路径添加上

















 3368
3368











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











