






自动驾驶决策规划算法第二章第二节(中) 参考线算法_哔哩哔哩_bilibili
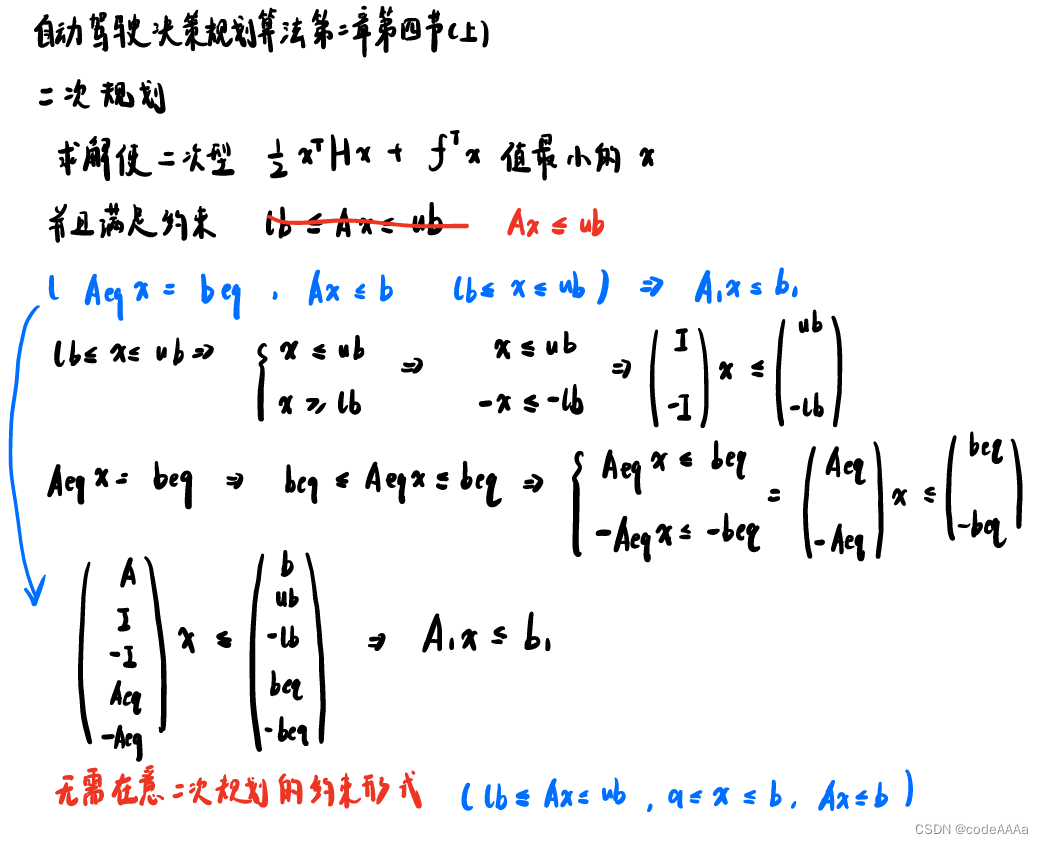
动态规划开辟的凸空间如下,两条橙色线之间:

黄色的点就意味着L的上下界,物理意义是当轨迹s=s1时,L的范围应该是(Lmin1,Lmax1)之间,这个范围就是开辟的凸空间。

规划的路径要满足:
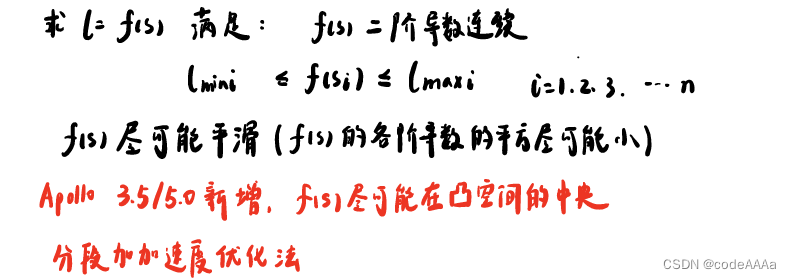
求解L = f(s)使用Apollo3.5中的算法——分段加加速优化算法:
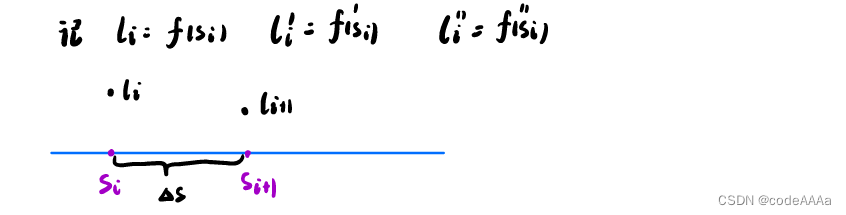

假设在f(s)的三阶导数![]() 恒为一个常数,那么f(s)四阶以上的导数都是0;
恒为一个常数,那么f(s)四阶以上的导数都是0;
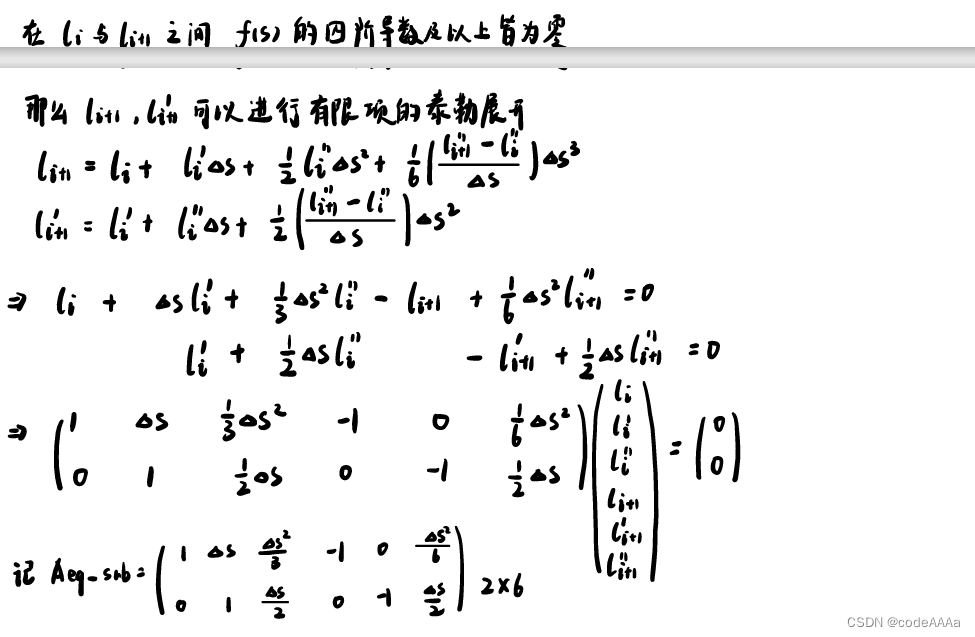

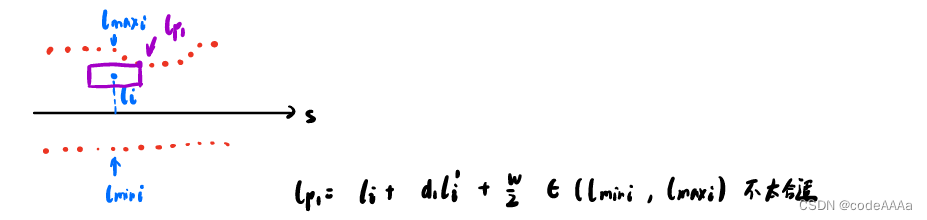
上面的方程组就是二规划的等式约束;除了对Li有等式约束,还有不等式约束,不等式约束主要就是L不能超过凸空间的范围,如下:


![]()
这样近似是安全的,大角度时只会把车估计大,而不是估计小,是一个比较安全的。
约束时:
使用上面的约束方法不合适,因为上图的Lp1已经碰到凸空间的边界。需要做的保守一些,如下:
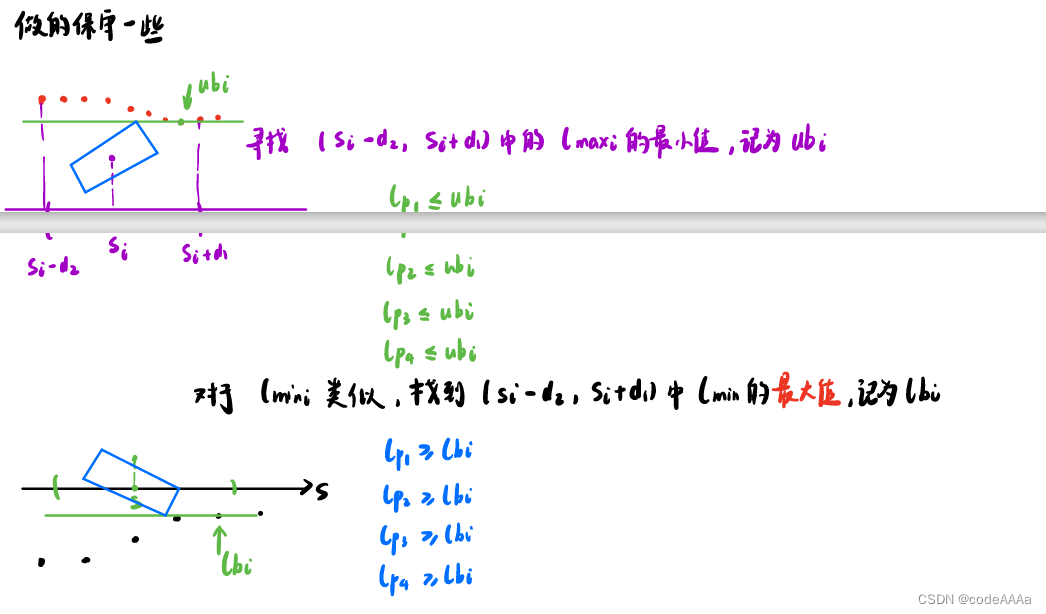
具体就是寻找车辆在凸空间上附近(si-d2,si+d1)所有lmaxi都囊括进来进行比较,选择最小值,记未ubi,使得四个脚点都要小于它,对于lmini也进行近似的处理,找到(si-d2,si+d1)所有lmini中的最小值,是四个角点都小于它。
不等式约束可以写成如下形式:

由上面可以推出总的不等式约束:

二次规划的等式约束和不等式约束都已经写出来了,接下来就写其cost function:
















 2814
2814

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









