






文章中的截图均来自于西北工业大学卢京潮教授的讲义,侵删。
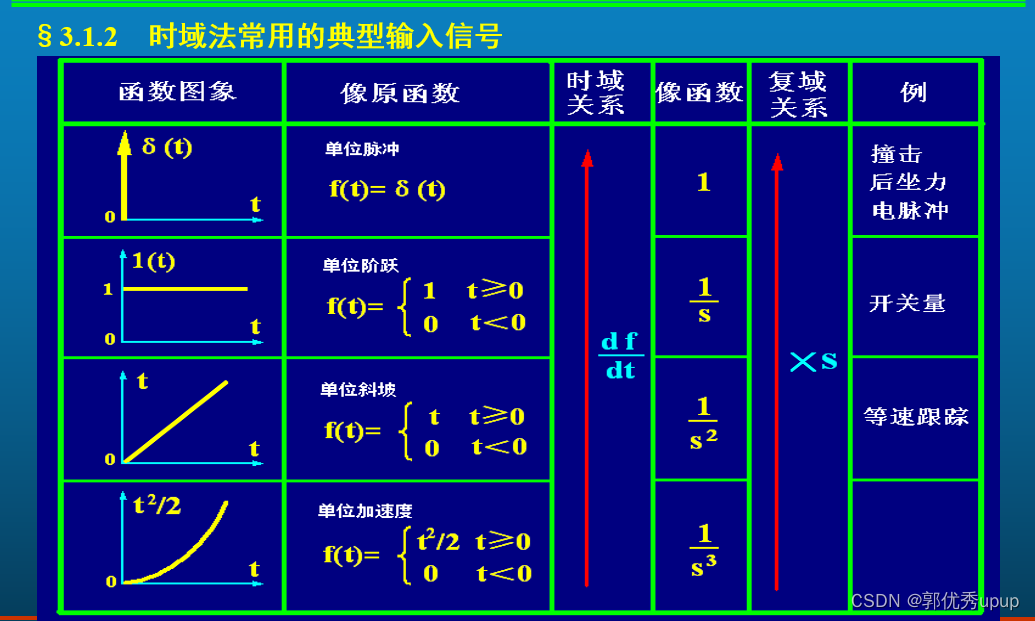
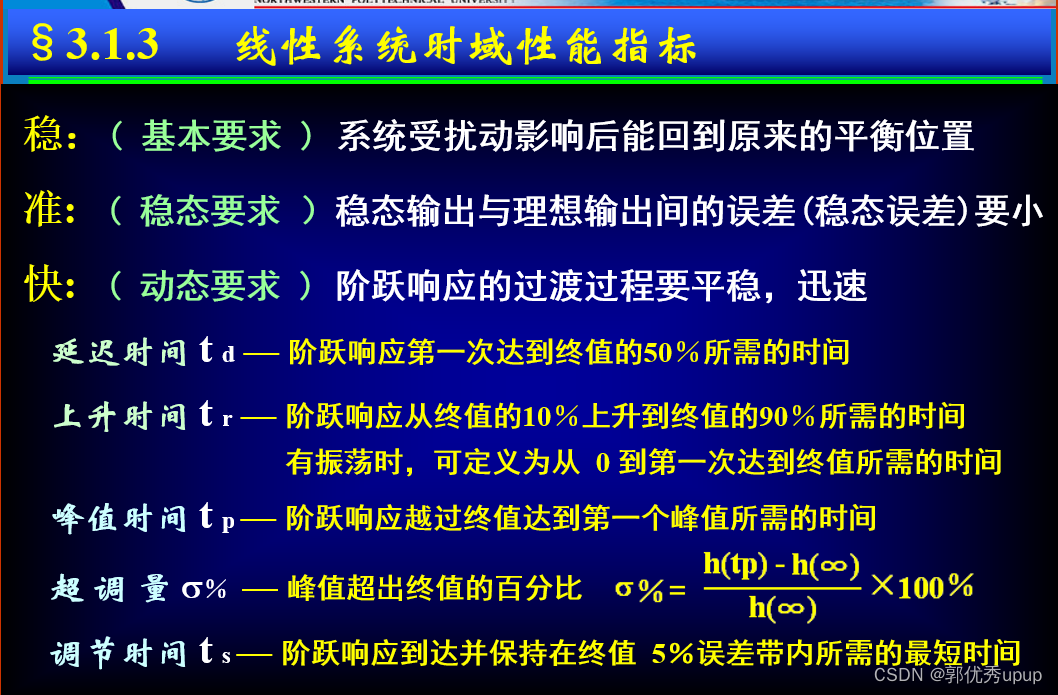
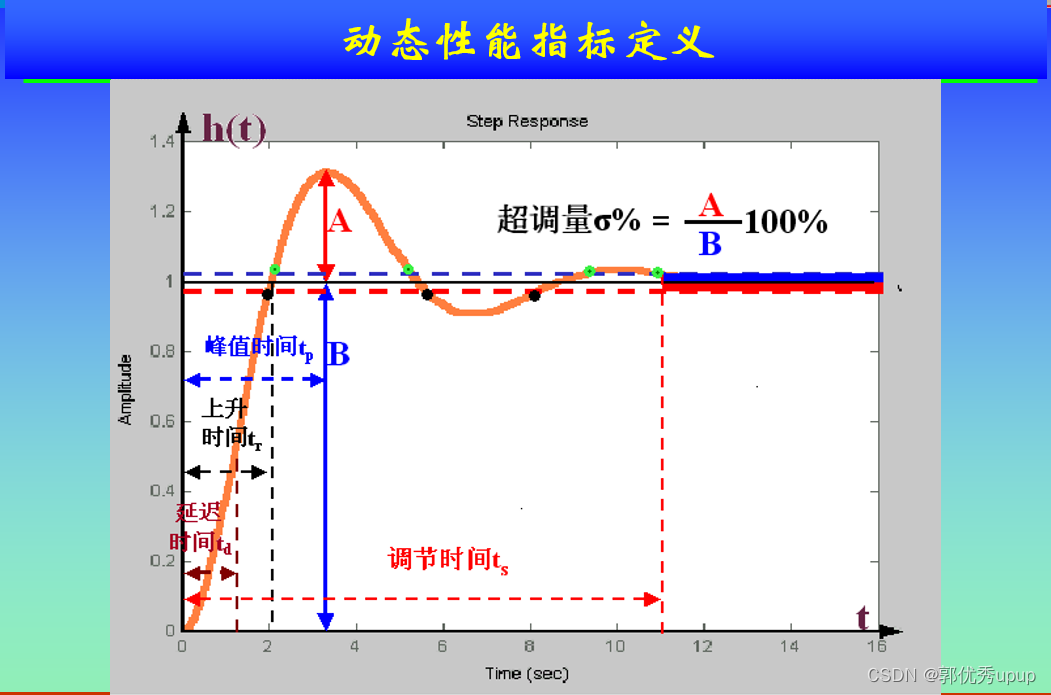
时域分析法概述
一阶系统的时间响应及动态性能
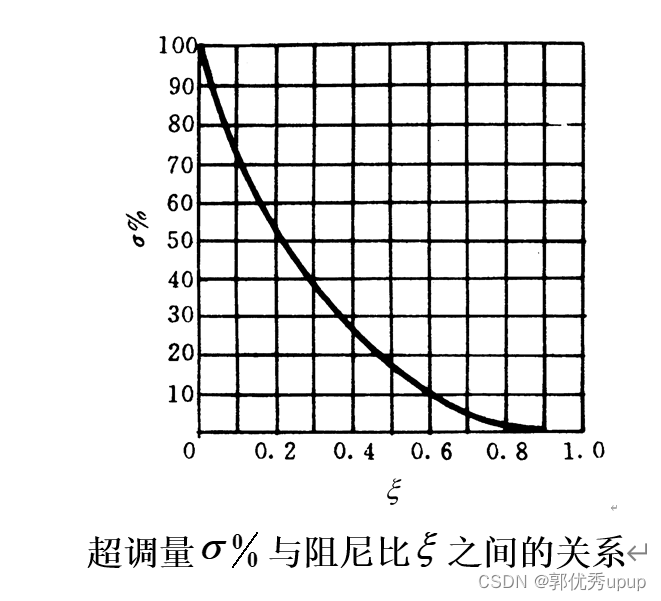
 超调量:反映一个系统跟踪一个阶跃信号的平稳性
超调量:反映一个系统跟踪一个阶跃信号的平稳性
调节时间:反映一个系统跟踪一个阶跃信号的迅速程度
一阶系统的时间响应及动态性能
一阶系统指的是其闭环传递函数的分母最高阶是一阶的系统。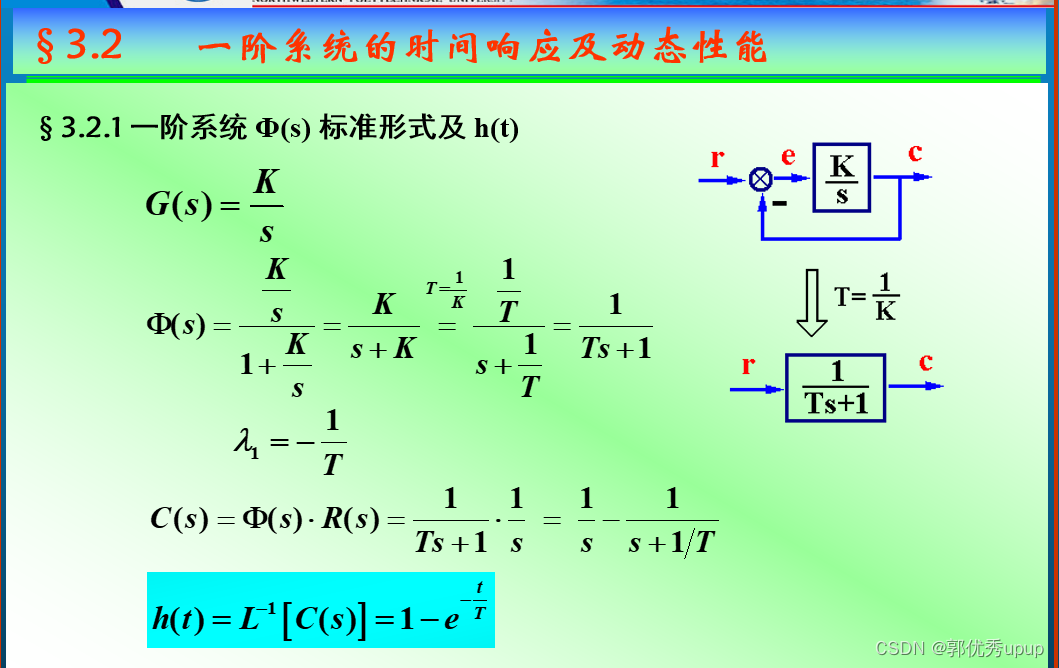
其中T是这个一阶系统的时间常数,时间常数的求法是将其闭环传递函数写成尾1标准形式,分母中s的系数就是其时间常数T。

例1:

一阶系统的典型响应
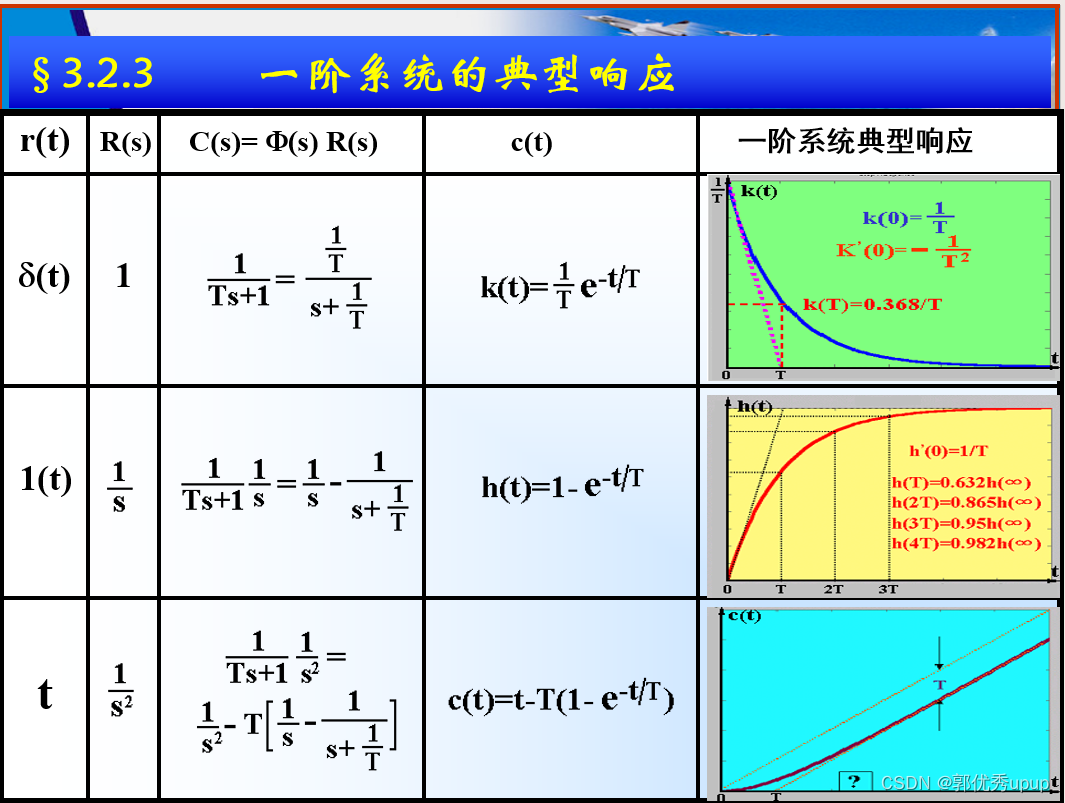
斜坡信号——单位阶跃信号——单位脉冲信号是逐层微分的关系;这三个信号对应的响应c(t)也是逐层微分的关系。从上面三个典型的响应可以看出系统对一个信号微分的响应等于这个系统对这个信号本身响应的微分,这个规则对于任意有限阶的线性定常系统都适用。
例子如下:
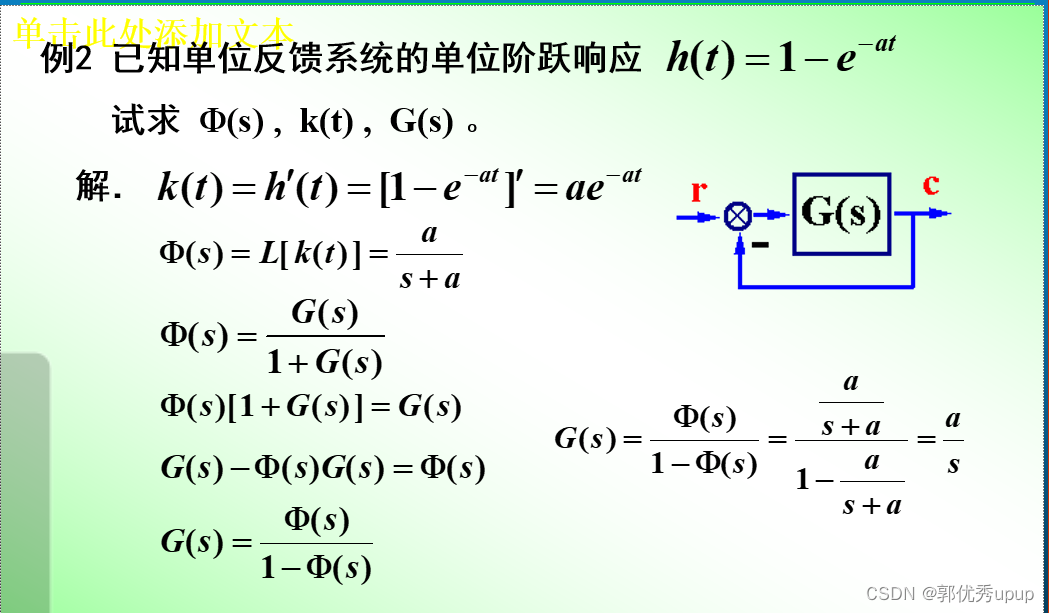
其中![]() 是闭环传递函数,
是闭环传递函数,![]() 是单位脉冲响应,
是单位脉冲响应,![]() 是开环传递函数。
是开环传递函数。
二阶系统的时间响应及动态性能
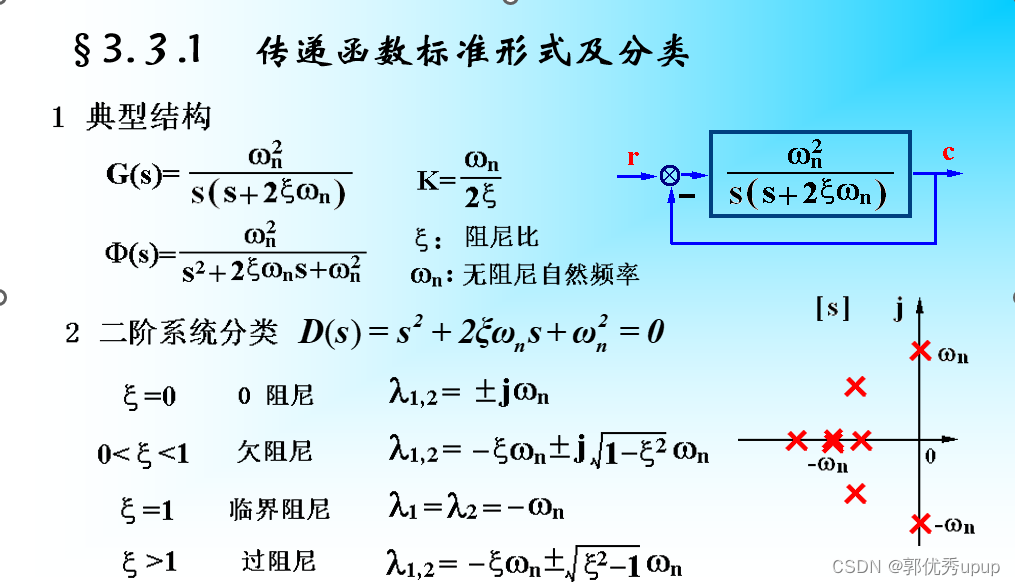

二阶系统一般习惯用首1形式,![]() 是二阶系统的特征方程,令特征方程的分母为0,其解为特征方程的根。
是二阶系统的特征方程,令特征方程的分母为0,其解为特征方程的根。
临界阻尼和过阻尼的动态性能指标
一般评价一个动态系统的动态性能指标都是给其一个单位阶跃输入:
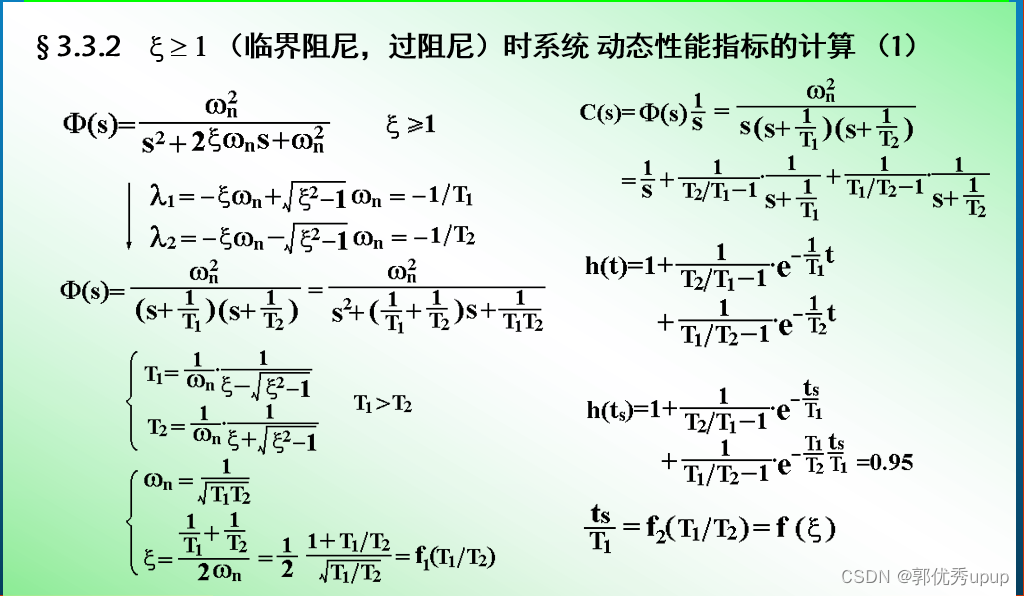
其中,这一步是将ts/T1当成是T1/T2的隐函数,当T1/T2确定时,ts/T1也就确定了。

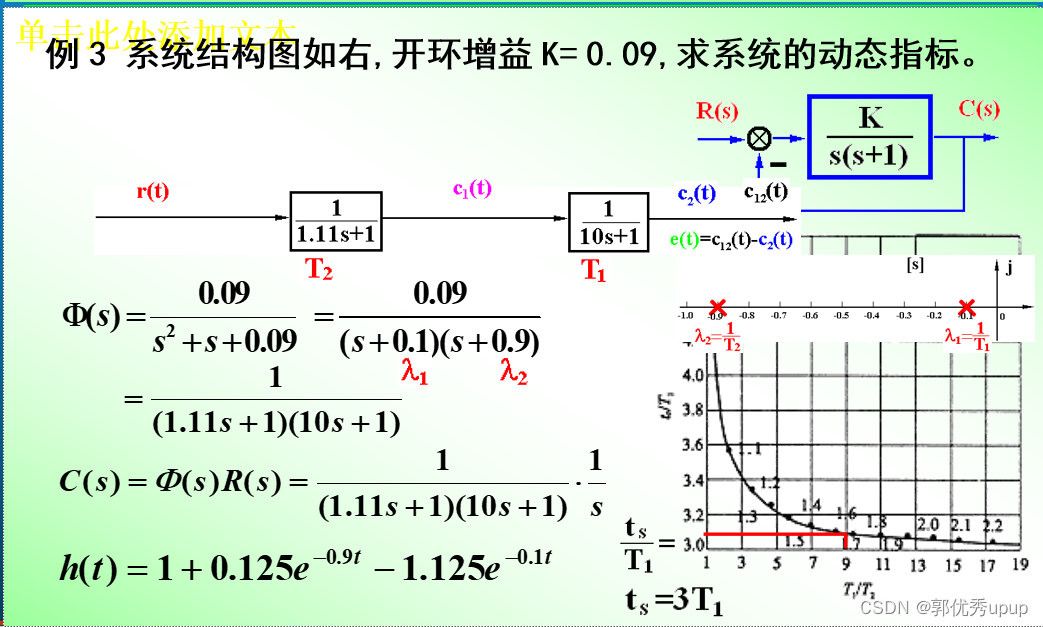
例子:

可以得出这个系统的调节时间是31s, 超调量是0,峰值时间是无穷,因为它一直在上升。
例子2
当传递函数变成上述情况,可以将其拆为两个惯性环节, 当输入一个单位脉冲信号时,若只有
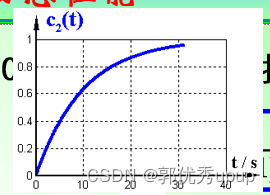
当输入一个单位脉冲信号时,若只有![]() 作用时,输出的响应图像是图1(如下所示),只有
作用时,输出的响应图像是图1(如下所示),只有![]() 作用时,输出的响应是图2,可见响应速度更快,由此可见,极点距离虚轴越远,其对应的时间常数越小,响应也就越快。当两个惯性环节叠加作用
作用时,输出的响应是图2,可见响应速度更快,由此可见,极点距离虚轴越远,其对应的时间常数越小,响应也就越快。当两个惯性环节叠加作用![]() 时,输出的图像是图3,比蓝色线慢了一点,因为当
时,输出的图像是图3,比蓝色线慢了一点,因为当![]() 作用后输出的响应(距离虚轴比较远,响应较快)只比单位脉冲慢一点。由此可见系统的响应是由距离虚轴较近的那个极点决定的,这个极点叫做闭环主导极点。
作用后输出的响应(距离虚轴比较远,响应较快)只比单位脉冲慢一点。由此可见系统的响应是由距离虚轴较近的那个极点决定的,这个极点叫做闭环主导极点。


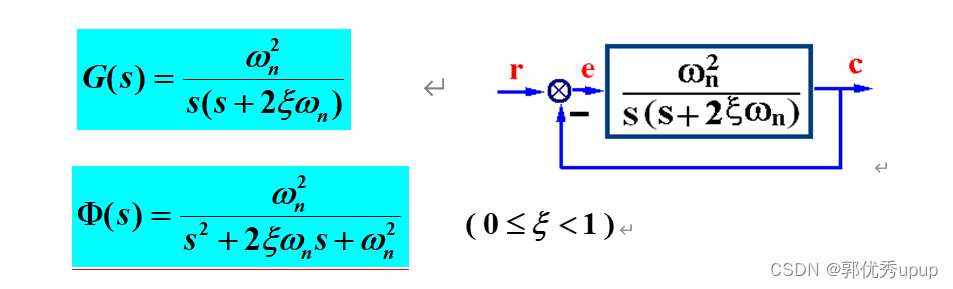
欠阻尼二阶系统动态性能指标计算
典型的欠阻尼二阶系统的传递函数如下:
欠阻尼二阶系统极点的两种表示方法
是一对共轭虚根,下图只画了上半部分:
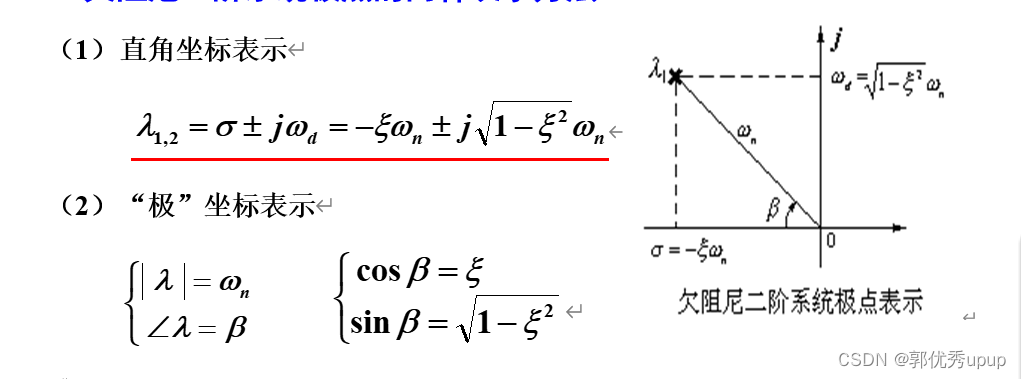
其中β角定义为从负实轴出发向右的角
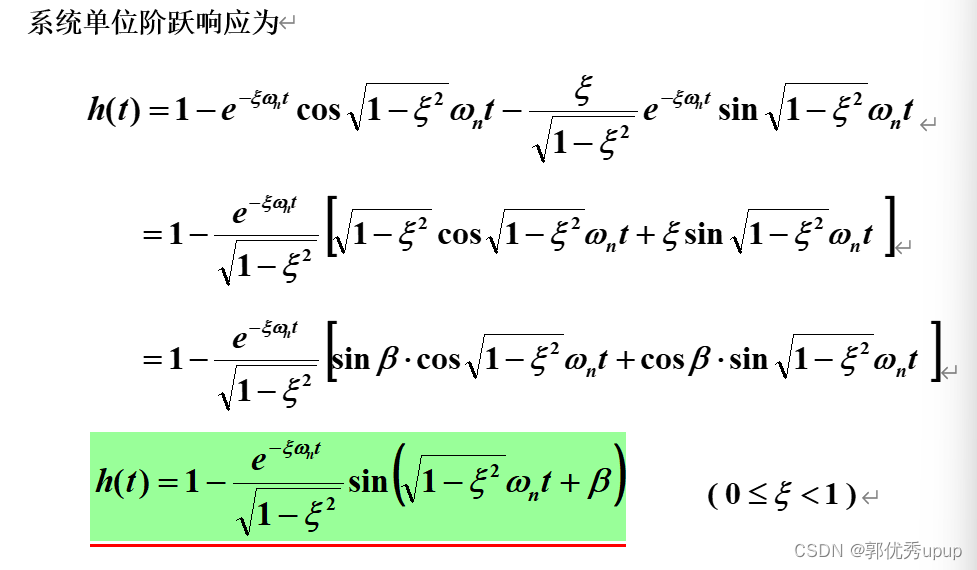
欠阻尼二阶系统的单位阶跃响应



现在看无阻尼的情况,也就ξ=0的情况时,此时极点只有虚根,也就是在虚轴上,β为90度。
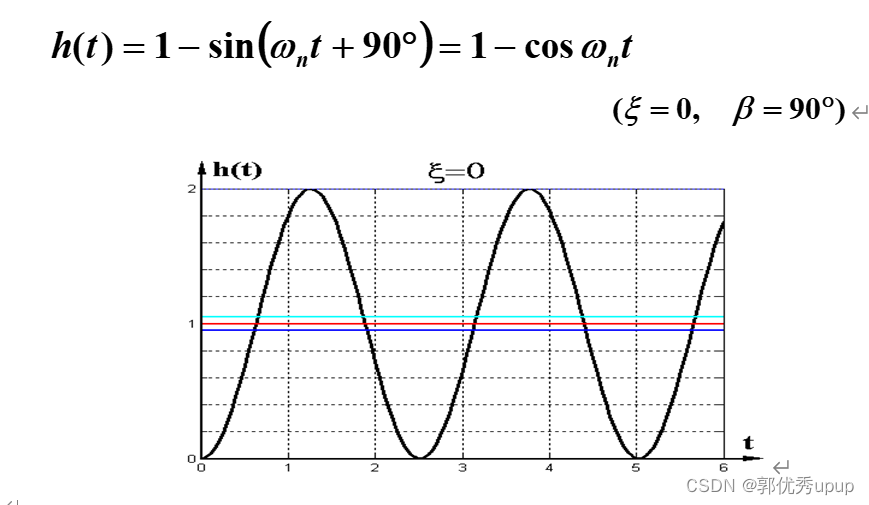
此时系统的峰值时间在1到2之间的那个峰值对应的点,超调量是百分之百,调节时间是无穷。
下面看欠阻尼系统的动态性能指标的求法:
1、超调量

求其超调量,先求峰值时间,也就是对单位脉冲响应求一次导,另其导数为0求得驻点:

直接对其求导会很复杂,这里用到了前一篇笔记中的一条结论,输入信号微分的响应等于该输入信号响应的微分,这里单位阶跃的微分是单位脉冲,所以单位阶跃响应的微分就对应于单位脉冲响应,单位脉冲响应的拉氏变换就是系统的传递函数,所以对系统的传递函数进行拉氏反变换就可以得到系统的单位脉冲响应,也就是单位脉冲响应的微分,另其等于0便可以得到驻点,进而得到峰值时间。

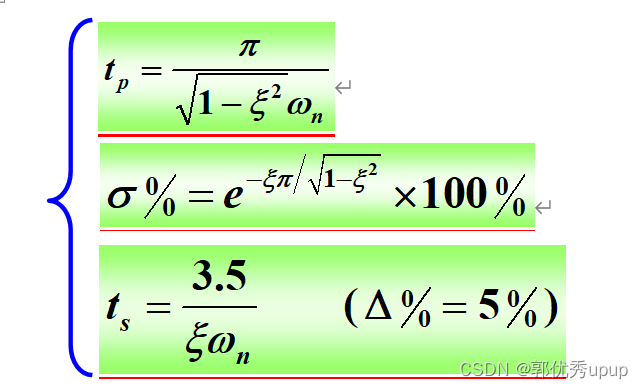
当![]() 等于π时,可求得其峰值时间:
等于π时,可求得其峰值时间:
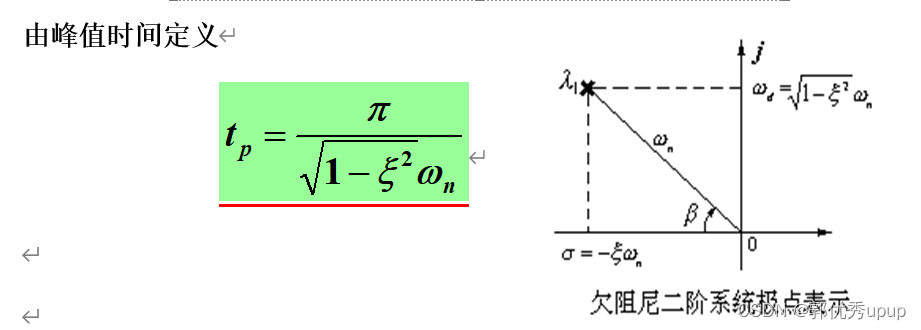
有上图可知峰值时间等于π除以极点虚部。 有了峰值时间将其带入到单位阶跃响应的表达式中就可以进一步得到峰值,再由峰值得到超调量。

由上图可知超调量只与阻尼比有关,和无阻尼自然频率无关,而由 可知β只和阻尼比是对应的。记忆方法就是:e的指数是π乘以极点的实部等再比上极点的虚部。
可知β只和阻尼比是对应的。记忆方法就是:e的指数是π乘以极点的实部等再比上极点的虚部。
2、调节时间
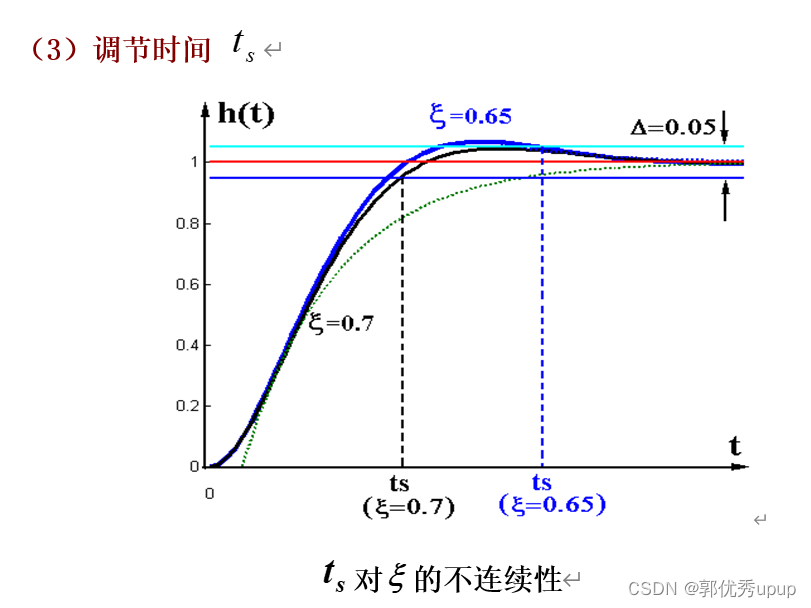
上图画出来阻尼比为0.65和0.7时系统的响应情况,当阻尼比为0.7是系统的稳定时间是黑色部分ts(也就也是系统没有的第一次峰值就在稳定值百分之五内),当阻尼比为0.65时系统的稳定时间是蓝色部分ts,可以看出蓝线比黑线晚一点进去稳定时间,随着阻尼比的连续变化(从6.5连续变换到7),调节时间的变化是间断的。现在将调节时间定义响应包络线进入百分之五误差所对应的时间,此时调节时间对应的变换是连续的。使用包络线进入百分之5误差是比较保守的,因为系统响应进去百分之5误差的时间可能比包络线要早。
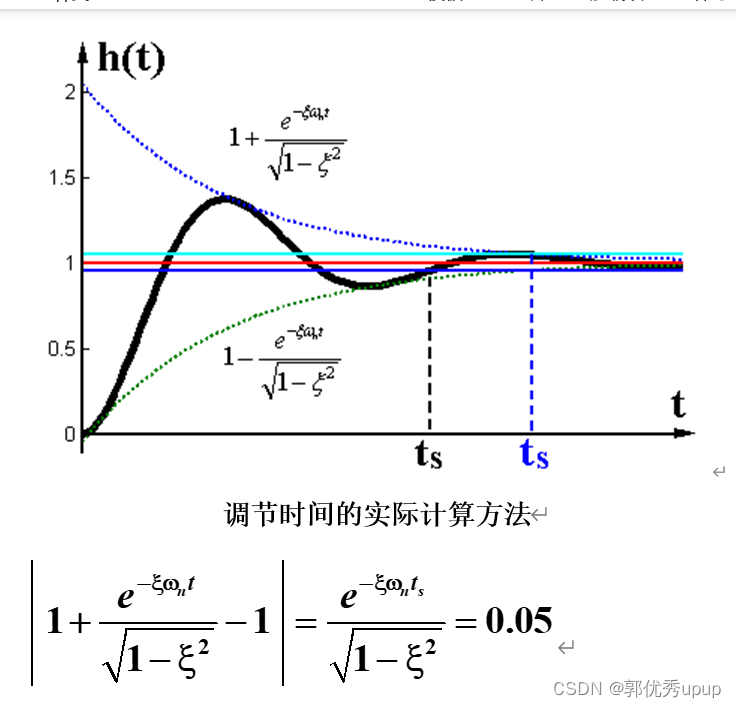
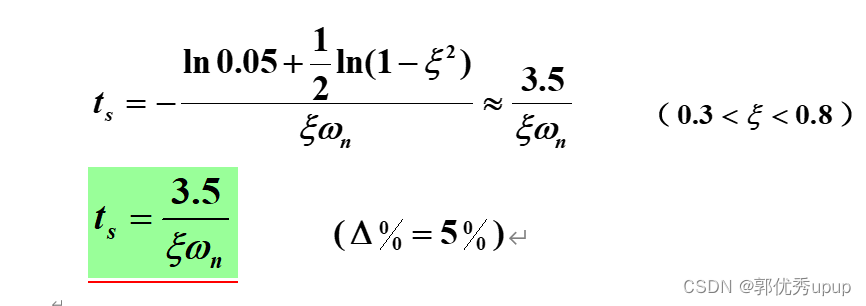
调节时间的等于3.5除以极点的实部。
小结(3个公式):
最佳阻尼比:

当阻尼比是0.707时对应于最佳阻尼比,此时β等于45度,见上图中的左图。
令极点的实部是一个常数,也就是![]() ,可以画出一条红线,这条红线上实部都是C,调节时间等于3.5除以极点的实部(包络线),所以按照包络线进入稳定值百分之5的调节时间,它们是一样的,都是3.5比极点的实部。但是按照实际的调节时间,当实部固定为C时。随着阻尼比的增加,也是极点沿着红线往上走(左图),调节时间是是变化的(右图)。右图是实际调节时间的图,可以看出它是间断的,当阻尼比是0.707时它对应的调节时间是2T(调节时间最小),而不是前面推导出来的3.5/ωnξ包络线进入稳定值百分之5的时间(也就是3.5T)。
,可以画出一条红线,这条红线上实部都是C,调节时间等于3.5除以极点的实部(包络线),所以按照包络线进入稳定值百分之5的调节时间,它们是一样的,都是3.5比极点的实部。但是按照实际的调节时间,当实部固定为C时。随着阻尼比的增加,也是极点沿着红线往上走(左图),调节时间是是变化的(右图)。右图是实际调节时间的图,可以看出它是间断的,当阻尼比是0.707时它对应的调节时间是2T(调节时间最小),而不是前面推导出来的3.5/ωnξ包络线进入稳定值百分之5的时间(也就是3.5T)。
总结就是验证了前面所说的按照包络线进入百分之5的调节时间是保守计算,实际调节时间比它要短。
二阶系统动态性能随极点位置分布的变换规律

以右下角的那个极点为参考点,当极点的实部保持不变,虚部增加一倍时, 由包络线公式![]() 可知包络线收敛的速率是一样的,阻尼振荡频率增加一倍(变化一周的时间变短一半),超调量会增加,调节时间基本不变。
可知包络线收敛的速率是一样的,阻尼振荡频率增加一倍(变化一周的时间变短一半),超调量会增加,调节时间基本不变。
当极点的虚部保持不变,实部的绝对值增加一倍,包络线的收敛速率增加,超调会减小,调节时间减小一半。
变化规律总结
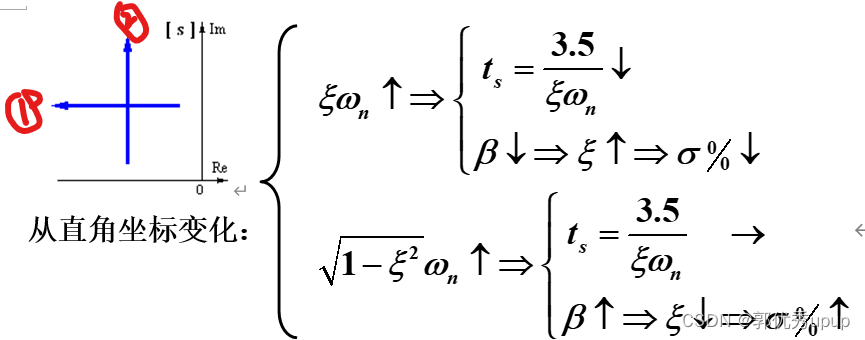
从直角坐标上来看,随着极点实部的增加,也就是箭头1,调节时间会减小,越往左,β越小,对应的阻尼比就越大,超调量就越小。随着虚部的增加,也就是箭头2,调节时间基本不变(包络线对应的调节时间),越往上β越大,对应的阻尼比就越小,超调量会增加。
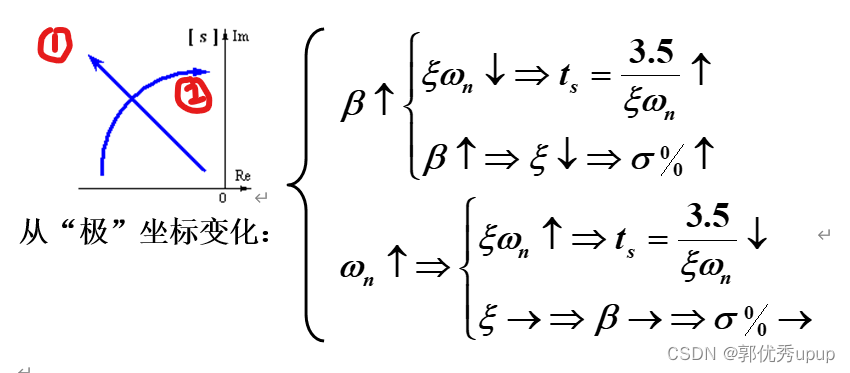
从极坐标上来看,β增加,阻尼比减小,也就是箭头2,是一个圆弧,说明无阻尼自然频率wn不变,超调量会增加,调节时间变长。
wn增加,也就是箭头1,他是一个射线,这条线上β是不变的,也就是阻尼比不变,超调量不变。此时极点的实部距离虚轴越来越远,调节时间变短。所以从理论上讲,极点最好在β为45度角的这条线上尽量远,这样的话可以保证即平稳又快。
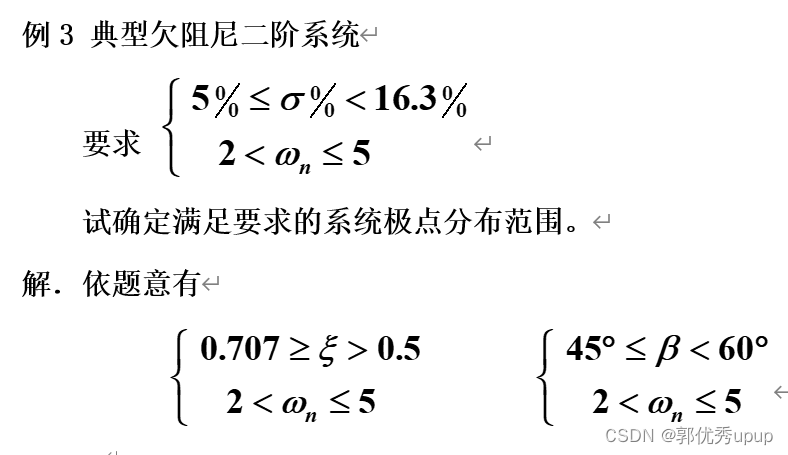
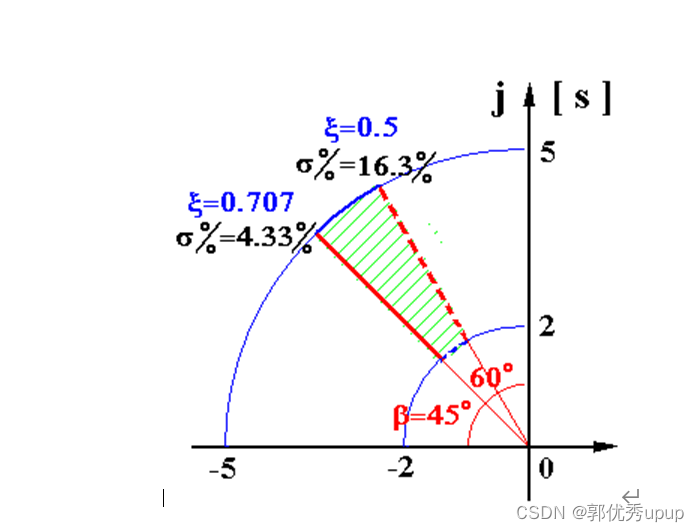
例子:
二阶系统性能改善及稳定性
首先看一个当开环增益K取不同值时系统有不同响应的例子:
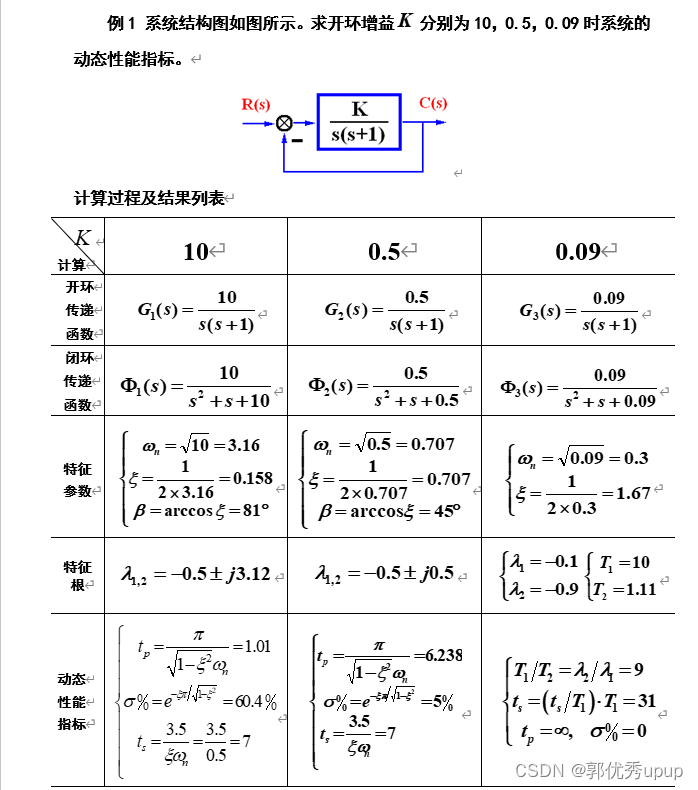
对应的图像为:
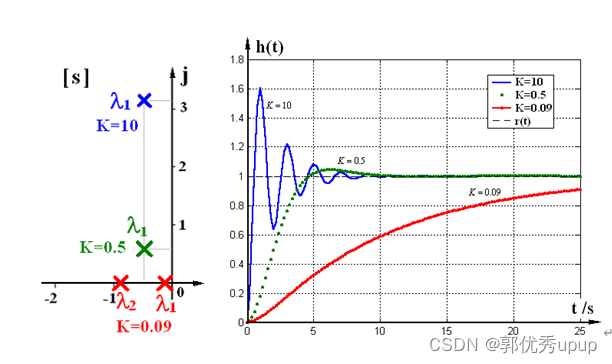
可以看出K=10是系统不平稳,当K=0.09时系统的调节时间过长,取K=0.5是系统是响应又快又平稳。所以合理地调整参数是可以在一定程度上改善系统性能,但是改善程度有限。
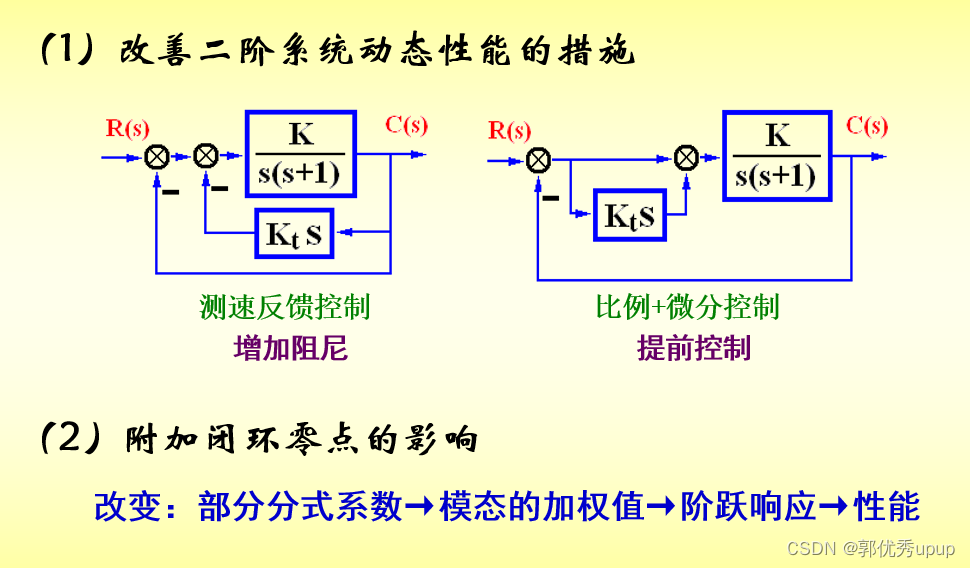
改善二阶系统动态性能的措施
(1)测速反馈——增加阻尼
(2)比例+微分——提前控制
下面使用上面当K=10时超调量很大的情况来说明两种改善措施的机理:

测速反馈是将输出对时间求一次导![]() (输出的速度)后再加上误差信号作为输入。由上面表格的比较可以看出测试反馈它改善系统性能的机理就是调节增大系统的阻尼比。如果系统原来的阻尼比已经很大了,那么这种方法是不合适的。
(输出的速度)后再加上误差信号作为输入。由上面表格的比较可以看出测试反馈它改善系统性能的机理就是调节增大系统的阻尼比。如果系统原来的阻尼比已经很大了,那么这种方法是不合适的。
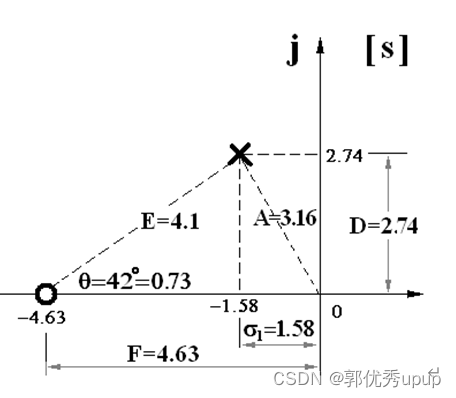
比例+微分控制(PD控制)就是将误差信号对时间求一次导后再和误差信号加在一起作为输入。由上表可以看出该方法对比测速反馈多了一个零点,闭环传递函数的极点是一样的。求其性能指标方法如下:(使用零点极点法)
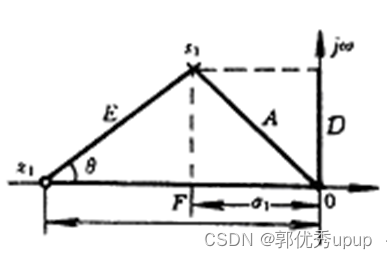
(1)画出其极点位置,这里是一对共轭的复根,只画了上半部分![]() ,(2)画出其零点的位置
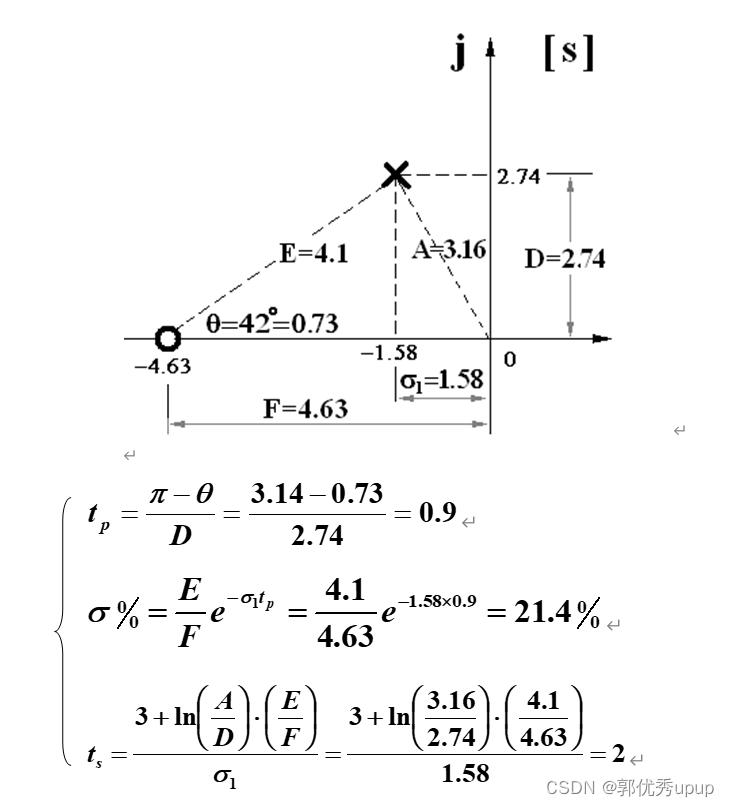
,(2)画出其零点的位置![]() 。(3)对应的求出σ1(极点对应的实部)和θ等。再带入以下的公式。
。(3)对应的求出σ1(极点对应的实部)和θ等。再带入以下的公式。

可求得该系统的动态性能指标:
在simulink中将原系统和比例——微分建模,如下:
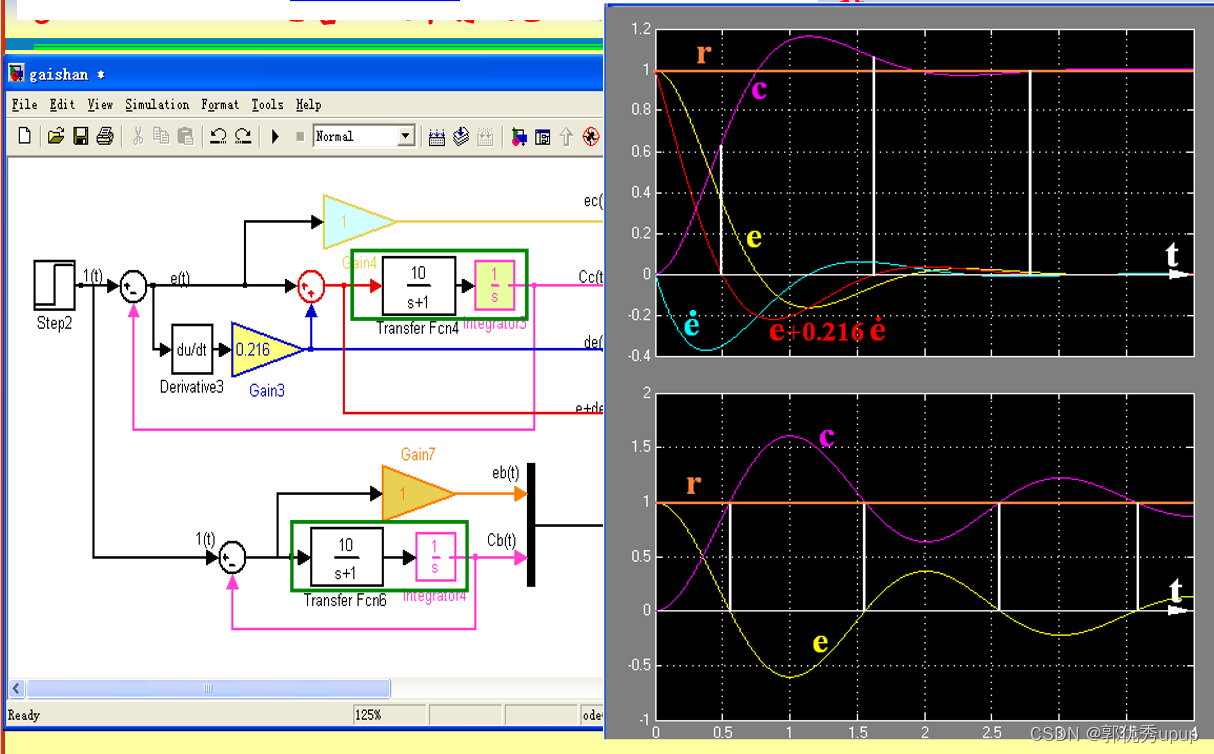
对比原系统,可以看出比例信号和微分信号相加后控制作用是超前的,这部分建议听老师的课。
将上面原系统、测速反馈和比例——积分画出:

测速反馈对应于绿线,比例——微分对应于蓝线。
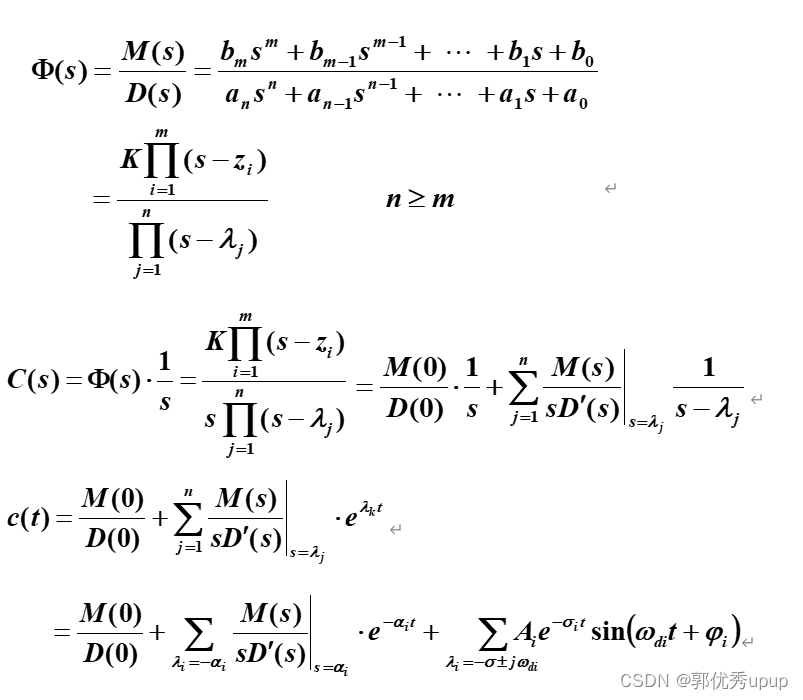
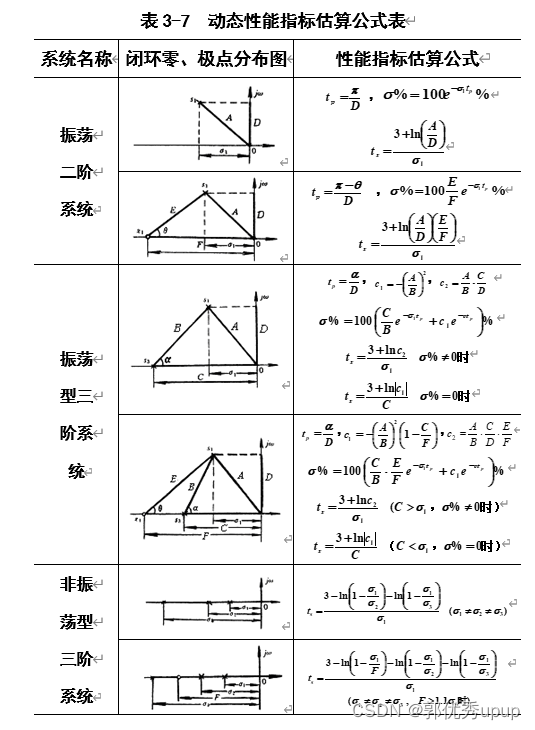
高阶系统的阶跃响应和动态性能指标
高阶系统的阶跃响应和动态性能指标一般使用零点极点法来进行简化和分析。
高阶系统的闭环传递函数、闭环传递函数对应的响应如下:
下面用一个七阶的系统来说明如何分析其系统的性能指标:

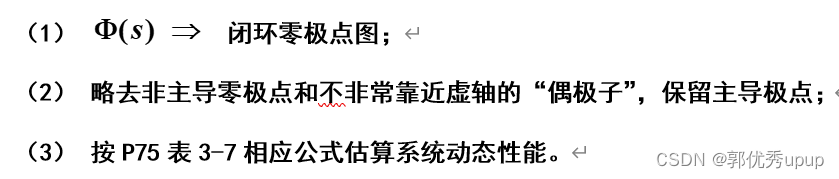
根据之前学过的,例虚轴最近的的极点对应的模态收敛的最慢,把距离虚轴比较近且周围没有闭环零点的极点称为闭环主导极点。
距离虚轴比较远的极点因为其只在系统初期起作用,对应的模态收敛的很块,所以在分析高阶系统时将距离虚轴比较远(这里远的定义是到达闭环主导极点距离虚轴距离的5倍或者5倍以上)的极点舍弃掉,将距离虚轴比较远的零点也舍弃掉。还有一种也舍弃掉,就是极点离虚轴不远,但是其周围近处(这里近的定义是这对零极点的距离是其模的10倍或者10倍以上)有一个零点,这一对零极点叫做偶极子,在分子分母上可对应消去。
将上述符合条件的零点和极点对应去掉,剩下的就是一个二阶的系统如下:
总结零点极点法就是:
表如下:
线性系统的稳定性分析
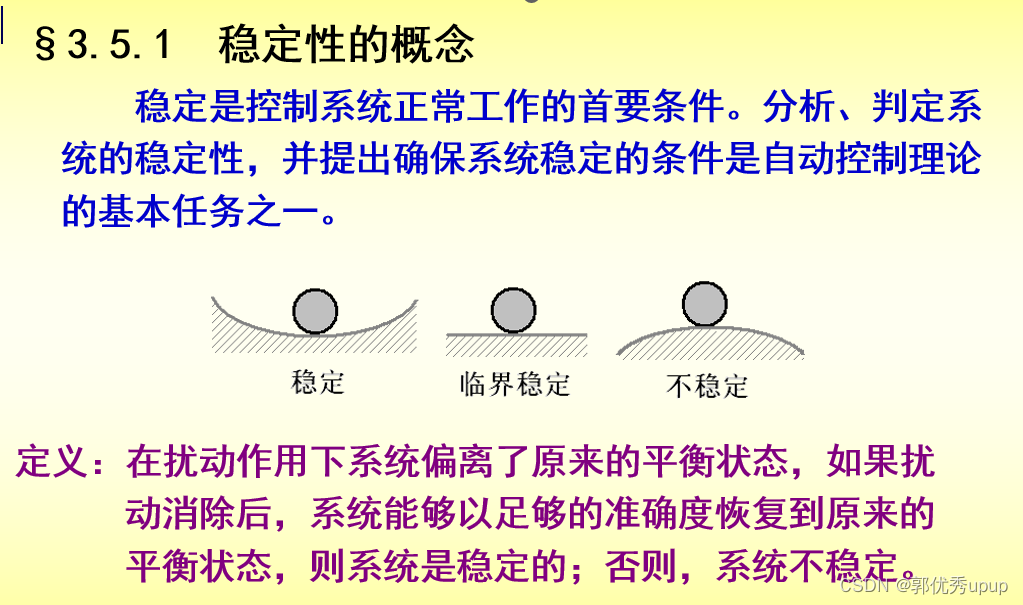
稳定性概念
稳定的充要条件
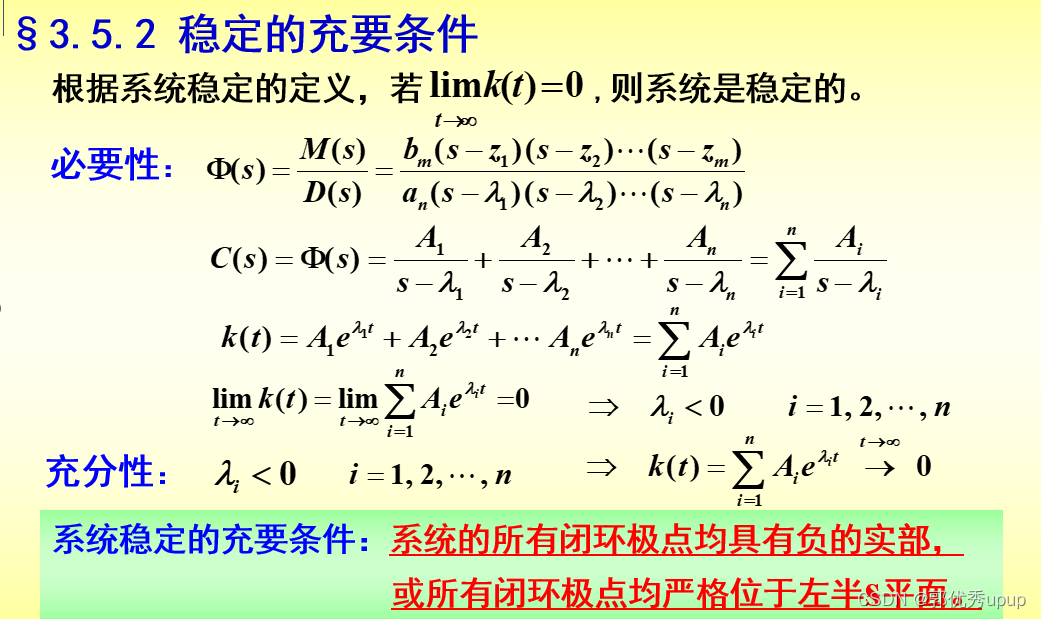
其中K(t)是系统的单位脉冲响应
稳定判据
当高阶系统不容易求其极点和零点时可以使用下面的稳定判据:
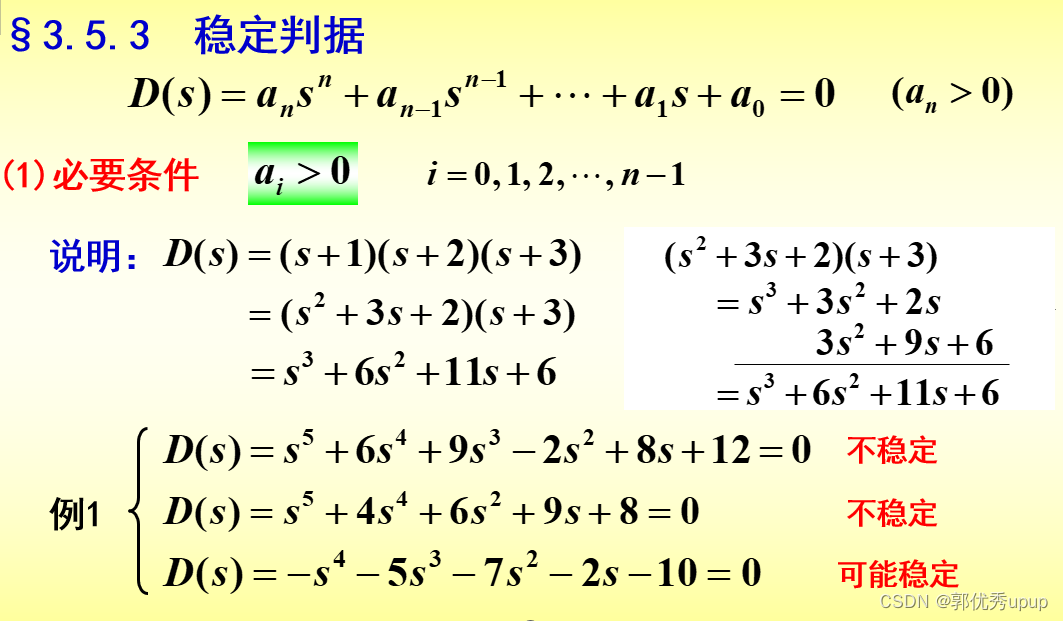
第一个二次项是负数;第二个缺三次项、三次项系数是0。
举例说明(使用劳斯判据):
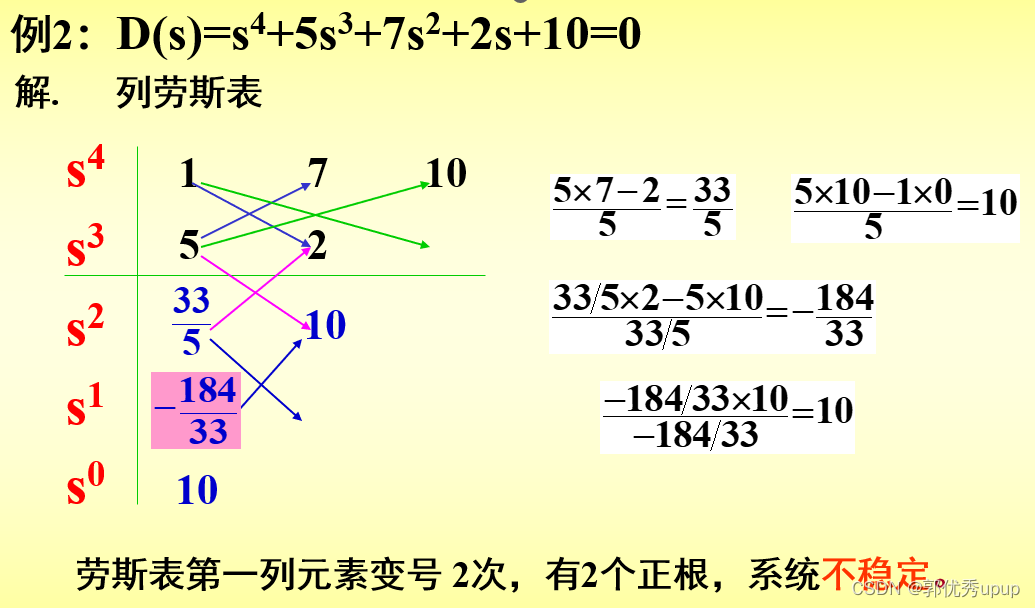
看劳斯表的第一列,第一列都大于0是系统是稳定的,这里有负数就不稳定,而且从33/5变成-184/33是由正变负,由-184/33到10是由负变正,正负号变换两次,说明有两个极点位于右半s平面。

劳斯判据特殊情况处理例1:

其中ε是一个正的微量。
劳斯判据特殊情况处理例2:
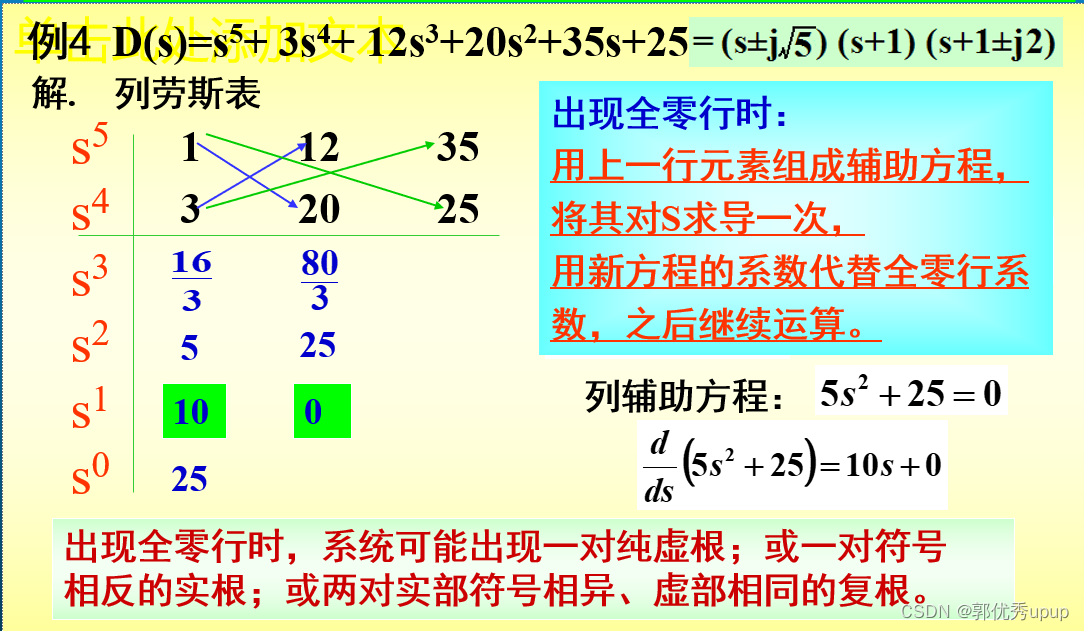
例4:
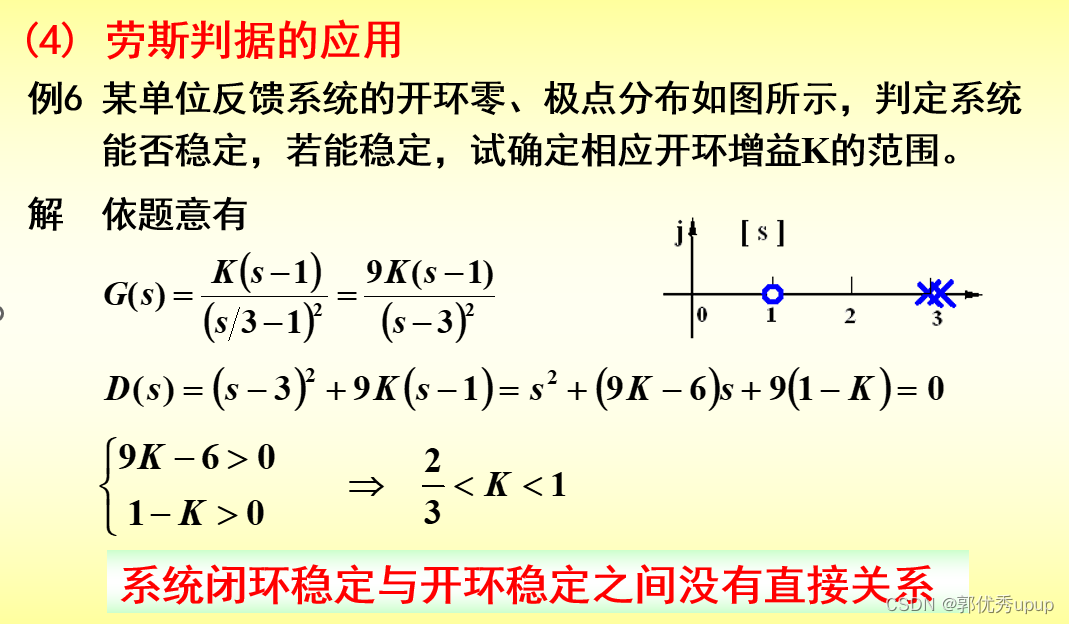
系统闭环稳定和开环稳定之间没有直接关系,一个系统参数取得好,他是有可能会稳定。
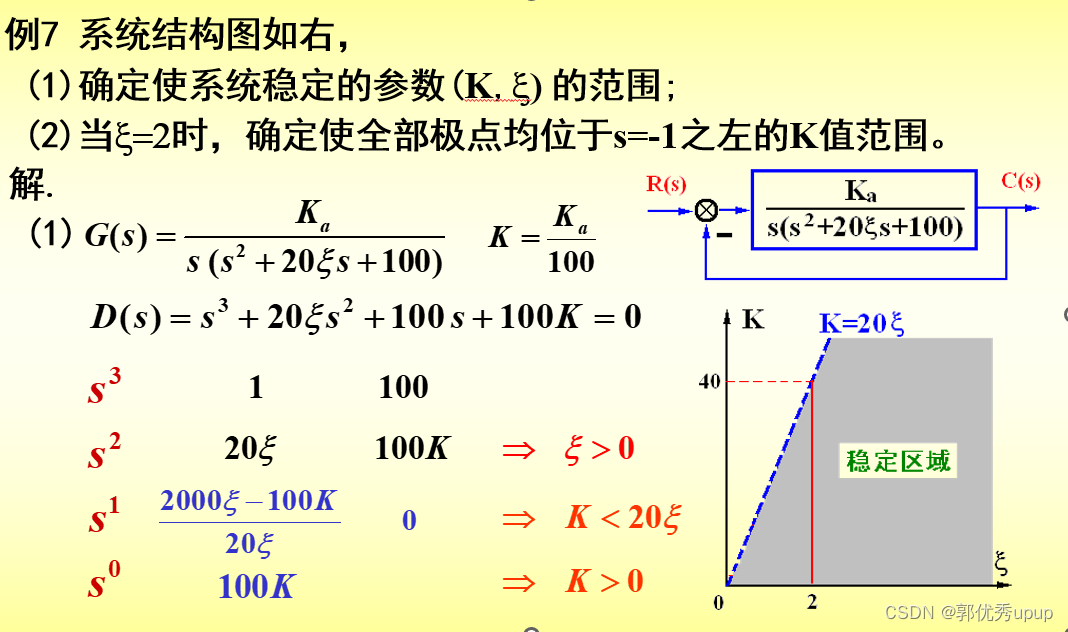
一个综合的应用例子
系统稳定性总结

线性系统的稳态误差
稳态误差的定义

注意:这里需要注意的无差系统的是该系统在阶跃信号作为输入时没有原理性稳态误差,当输入信号变了,他可能就有稳态误差了。
误差和稳态误差

误差可以使用输入端定义的误差和输出端定义的误差两种表述方式。上图中比较点后移便可以得到按输出端定义的误差。 一般情况下说的误差就是按输入端定义的误差。
计算稳态误差的方法
计算稳态误差的一般方法

第一步是判断一个系统是否稳定,是稳定的再进行第二步;(2)求误差传递函数,E(s)是由控制输入引起的误差分量,第一个传递函数是输入引起的误差传递函数(R入E出),第二个式子是由干扰作用下的误差传递函数(N入E出)。(3)使用终值定理来求稳态误差。
例1:

其中上面的两个传递函数的求法用梅逊增益公式理解。从最后的稳态误差式子可以得出结论,稳态误差是和系统自身的结构参数(K、Kn等)有关,和系统的外作用类型有关,是由输入引起还是干扰作用引起。
例2:
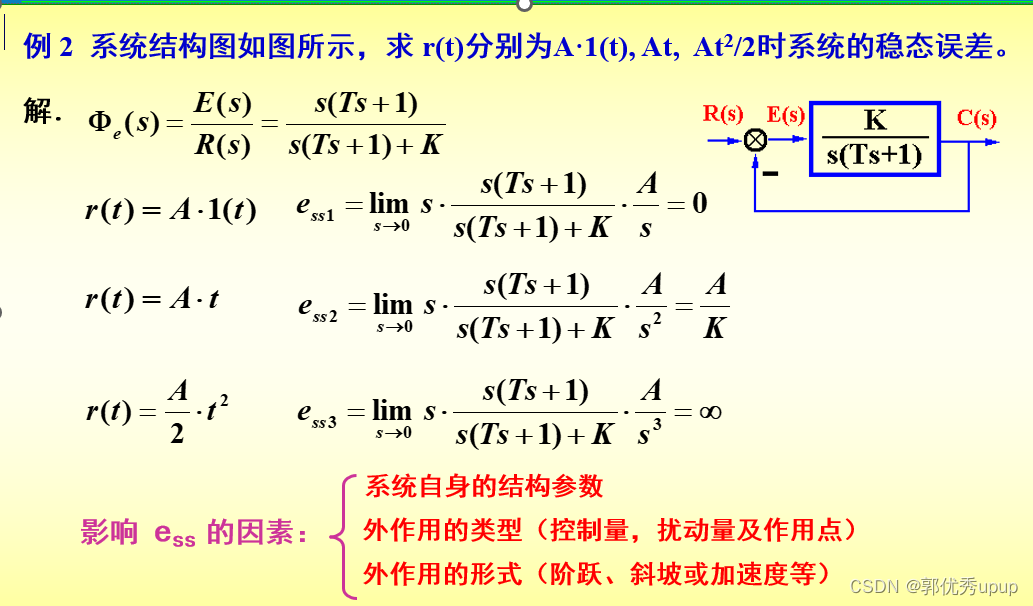
静态误差系数法
使用静态误差系数的步骤及适用条件:
静态误差系数法是专门针对控制输入引起的稳态误差的计算。

先求系统的开环传递函数,将其化成尾一标准型和多因式相乘的形式,得到K就是其开环增益,v是其纯积分环节的个数。 型别是对闭环系统而言的,v是几,这个闭环系统就是几型的。
从上面的稳态误差表达式中可以很直观的看出与输入有关(R(s)),和系统的参数有关(开环增益和型别)。
推出上述系统的稳态误差的一般形式,就可以求出输入不同时对应的稳态误差。

其中当输入信号是阶跃信号(把阶跃性的输入称为位置输入)时,静态位置误差系数就是直接求开环传递函数极限。斜坡型的信号又称为速度输入,静态速度误差系数开环传递函数乘s后取极限。加速度型信号称为加速度输入,静态加速度误差系数就是开环传递函数乘s平方后取极限。
不同型别的系统对应的静态误差系数和稳态误差系数

一个系统的型别确定了以后,他的稳态误差是随着输入档次的提高而增加(表的横向);当输入确定后,系统的稳态误差是随着系统的型别而降低的(表的纵向);当型别和输入档次对等后,稳态误差是一个非零的常值;如果型别高输入档次低,稳态误差就全是0;如果系统型别低,输入档次高,稳态误差都是无穷大。
例1:使用静态误差系数法来计算系统的稳态误差

例1:前馈补偿的复合控制对系统稳态误差精度的影响
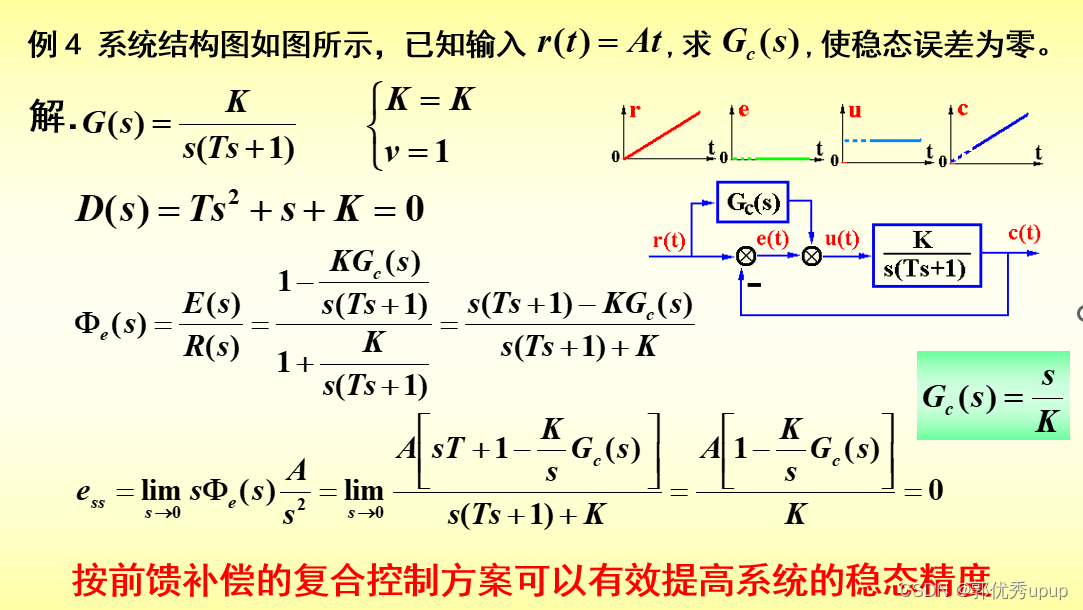
分析:当系统没有前馈时,系统的的型别是1,输入也是1档次,根据静态误差系数法可知系统的稳态误差不可能是0,加了一个前馈,可以使得系统的稳态误差为0,相当系统的型别提高了一个档次。这里是按照输入端定义误差,但是不可以用静态系数法来求其稳态误差,因为有一个前馈,只能使用一般方法来计算。
干扰作用引起的稳态误差分析
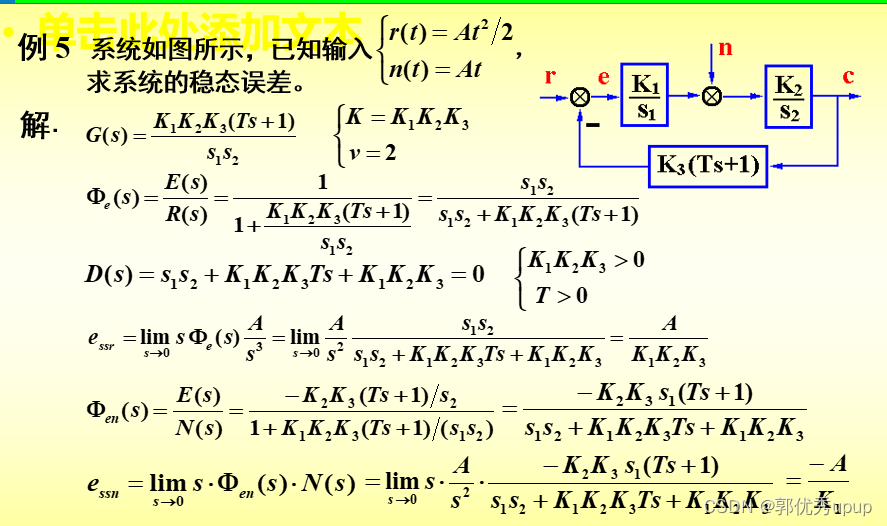
由![]() 可知对于输入R引起的稳态误差来说,开环增益K1、K2、K3无论放在那个位置都不影响系统的稳态误差;由
可知对于输入R引起的稳态误差来说,开环增益K1、K2、K3无论放在那个位置都不影响系统的稳态误差;由![]() 可知由干扰引起的稳态误差,只有将积分环节和开环增益放在
可知由干扰引起的稳态误差,只有将积分环节和开环增益放在![]() 这里才有效(放在主反馈通道后面和干扰作用前向通道前面)。
这里才有效(放在主反馈通道后面和干扰作用前向通道前面)。
最后得出结论:在主反馈口到干扰作用点之间的前向通道中提高增益、设置积分环节,可以同时减小或消除控制输入和干扰作用下产生的稳态误差。
动态系统误差系数法

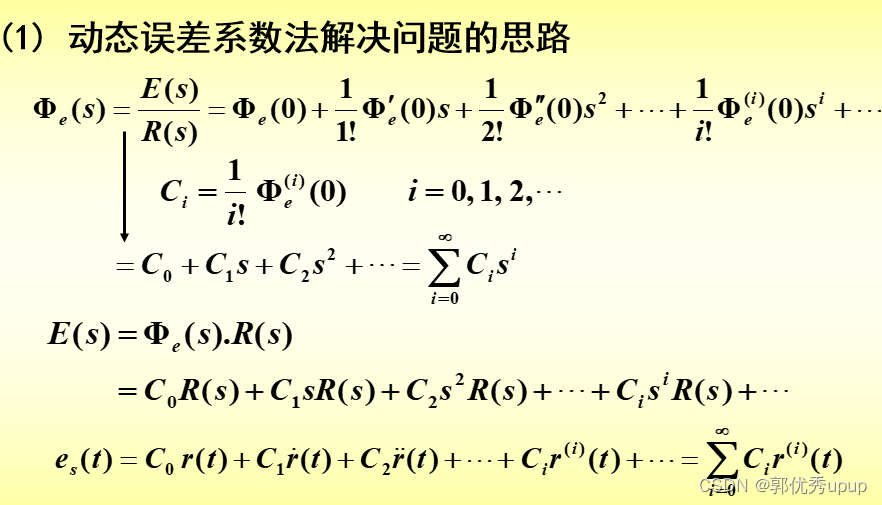
其中第一步是在s=0处将误差传递函数展开成泰勒级数。其中ci是动态误差系数。
(1)系数比较法 (2)长除法
例1:
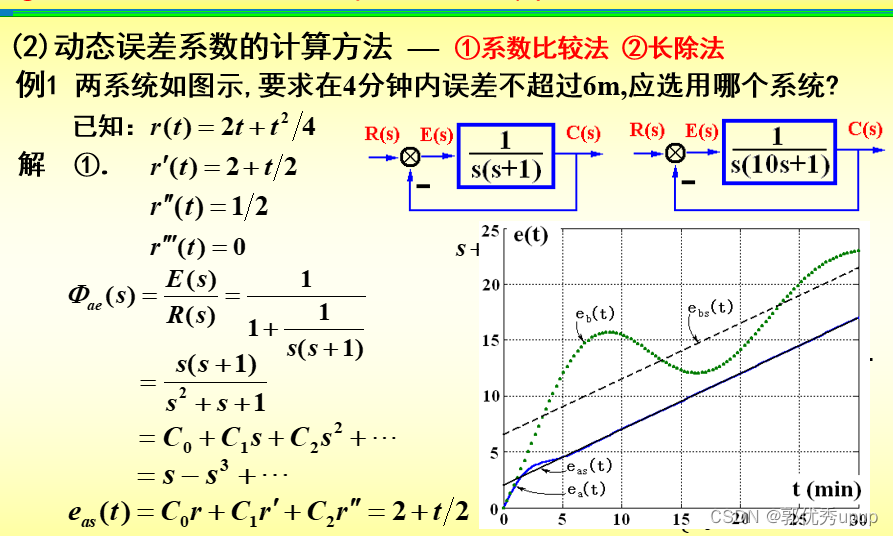

分析:该系统是1型的,输入是二阶的,当t趋近于无穷时,稳态误差肯定是趋近无穷。所以使用静态误差系数法研究其当时间趋于无穷大时的静态误差是没有意义的,但本题要求的在4分钟之内它的稳态误差不超过6分钟,使用动态误差系数法。
说明:动态误差不是误差的全部信息,只是误差中的稳态分量,具体说明如下(以上述例子中第一个系统为例):
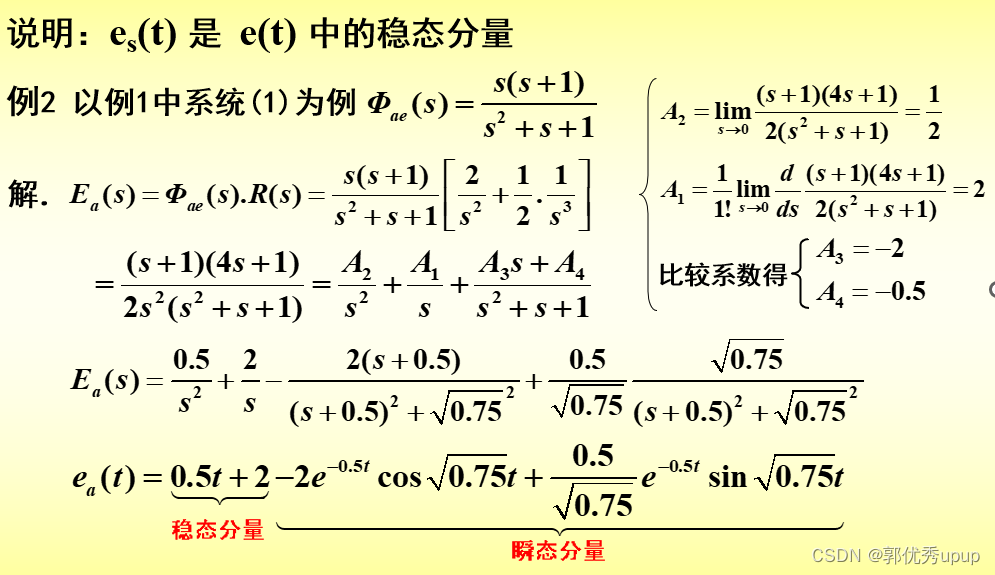
具体步骤是将误差传递函数乘于输入可以得到误差,将误差进行拉氏反变换,可以得到最后一行的式子,其中前半部分是稳态分量,后半部分是瞬态分量。
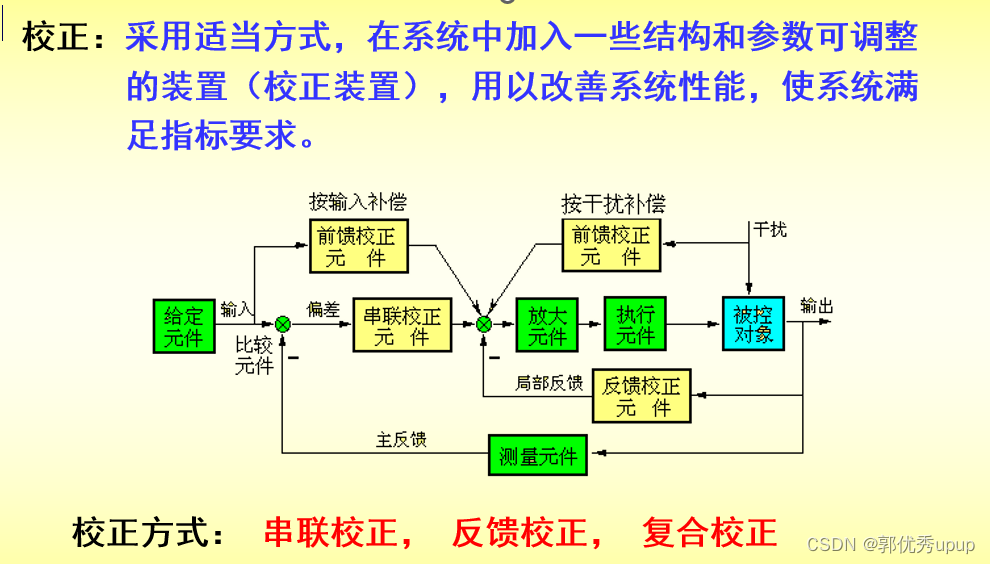
线性系统时域矫正
反馈的作用:
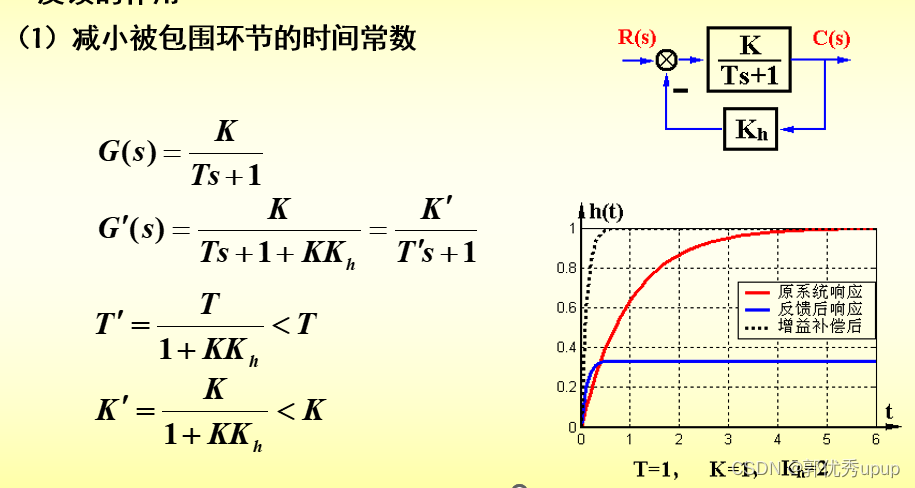
其中Gs是没有任何反馈时系统的传递函数,此时的时间常数是T;G's是加了反馈后的闭环传递函数,此时的时间常数是T’,![]() ,当Kh取的最后大,分母就足够大,T除以一个足够大的数,T'就小很多,时间常数以及调节时间都会小很多,可以改善系统的动态性能指标。但是T'减小,同时K'也会减小,T减小到'多少倍,K也会同样的倍数减小到K'。体现在上面的图中就是红线是没有反馈时系统的响应,蓝线是系统有反馈时系统的响应,这里看出系统的调节时间快了,但是系统的增益也减小了,而且是以相同的倍数。要想把增益补起来要加一个增益补偿(效果就是黑黑虚线的图)。
,当Kh取的最后大,分母就足够大,T除以一个足够大的数,T'就小很多,时间常数以及调节时间都会小很多,可以改善系统的动态性能指标。但是T'减小,同时K'也会减小,T减小到'多少倍,K也会同样的倍数减小到K'。体现在上面的图中就是红线是没有反馈时系统的响应,蓝线是系统有反馈时系统的响应,这里看出系统的调节时间快了,但是系统的增益也减小了,而且是以相同的倍数。要想把增益补起来要加一个增益补偿(效果就是黑黑虚线的图)。

深度负反馈的意思就是小回路的增益值特别大, 反映到这就是H(s)很大。就可以很有效的削弱前向通道G(s)的影响。
举例说明反馈矫正:
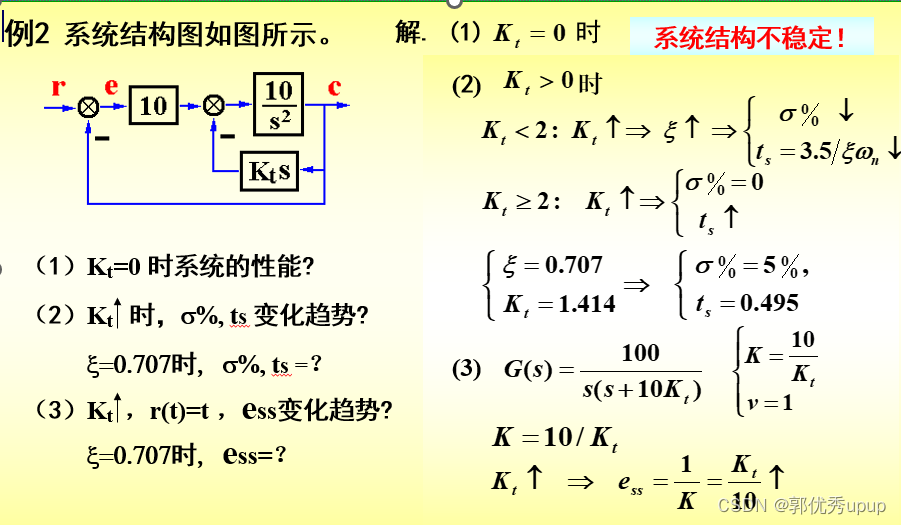
其中第一问计算出来的系统的闭环传递函数是 ![]() ,其中由
,其中由![]() 可知系统结构不稳定,系统结构不稳定不能通过调整开环增益(也就是单纯的调参)来使系统趋于稳定。只有改变系统的结构来改善系统的稳定性。
可知系统结构不稳定,系统结构不稳定不能通过调整开环增益(也就是单纯的调参)来使系统趋于稳定。只有改变系统的结构来改善系统的稳定性。
第二问当Kt大于0时,此时系统的开环传递函数就是![]() ,此时系统是1型的,系统的开环增益是10/Kt。闭环传递函数是
,此时系统是1型的,系统的开环增益是10/Kt。闭环传递函数是![]() ,在计算系统的动态性能指标
,在计算系统的动态性能指标![]() 。
。
举例说明复合矫正:
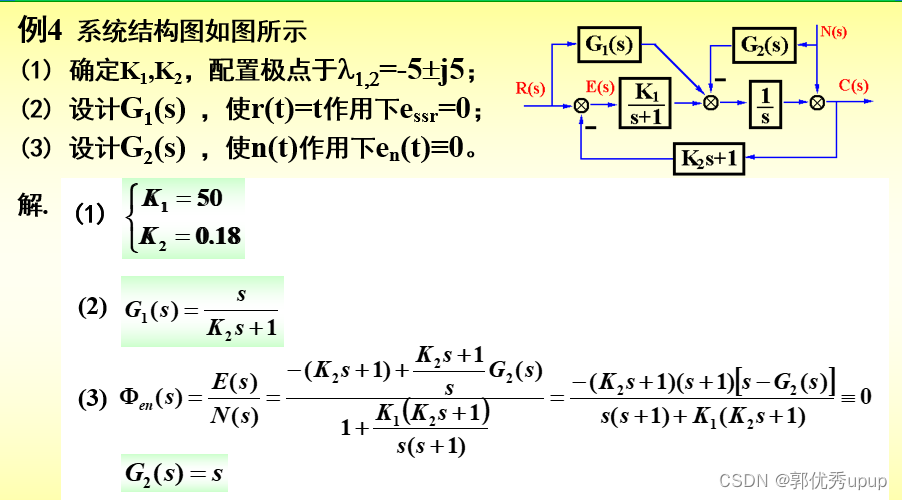
解析:其中第一问的开环传递函数是 ,系统是1型的,特征式是
,系统是1型的,特征式是![]() 当K1、K2都大于0时系统是稳定的。
当K1、K2都大于0时系统是稳定的。
第二问是不可以使用静态误差系数法因为它有前馈。只能使用一般方法,首先求其误差传递函数,也就是R如E出,这里需要注意的是它有两个前向通道。它的误差传递函数是![]() ,使用终值定理便可以得到结果
,使用终值定理便可以得到结果![]() 。
。
第三问:只能使用一般方法,N入E出,有两个前向通道。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









