






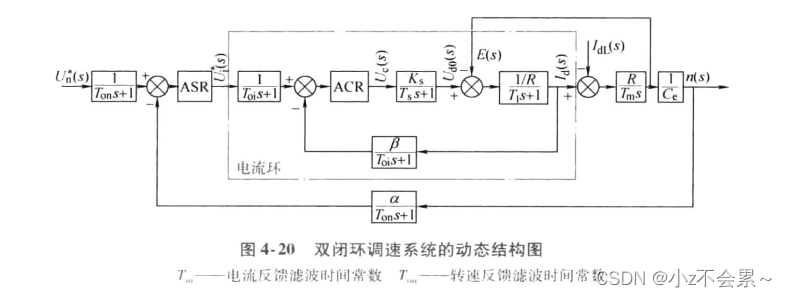
用工程设计方法来设计转速、电流双闭环控制系统的原则是“先内环后外环”。设计步骤是:先从电流环(内环)开始,对其进行必要的变换和近似处理后,根据电流环的控制要求确定把它校正成哪一类典型系统,再按照控制对象确定电流调节器的类型,最后按动态性能指标要求确定电流调节器的参数。
设置滤波环节的必要性是由于反馈信号检测中常含有谐波和其他扰动量,为了抑制各种扰动量对系统的影响,需加低通滤波,这样的滤波环节传递函数可用一阶惯性环节来表示,其滤波时间常数按需要选定。然而,在抑制扰动量的同时,滤波环节也延迟了反馈信号的作用,为了平衡这个延迟作用,在给定信号通道上加入一个同等时间常数的惯性环节,称作配合滤波环节。
1 电流调节器的设计
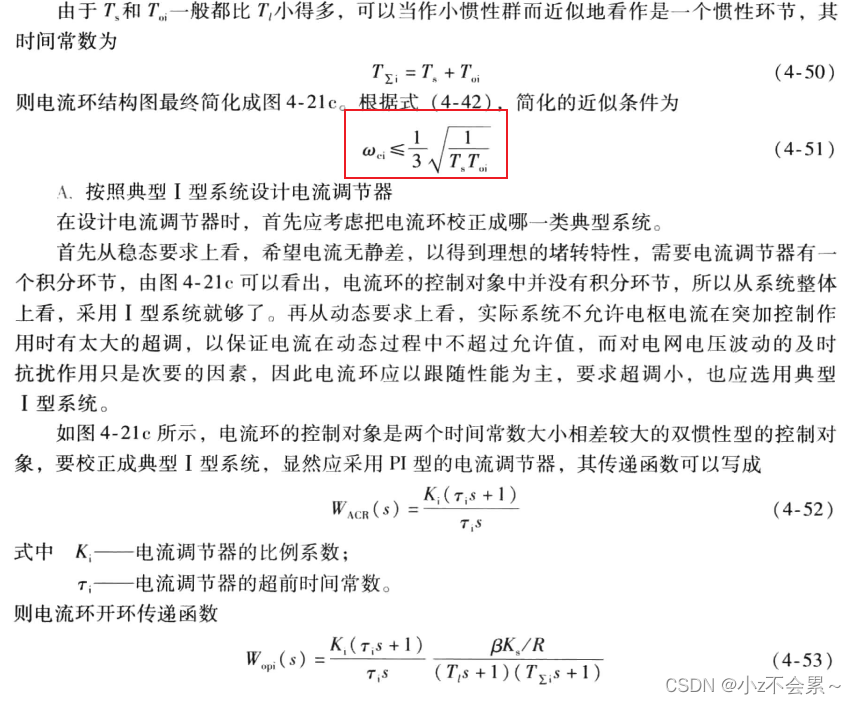
按照典型i型系统设计电流调节器
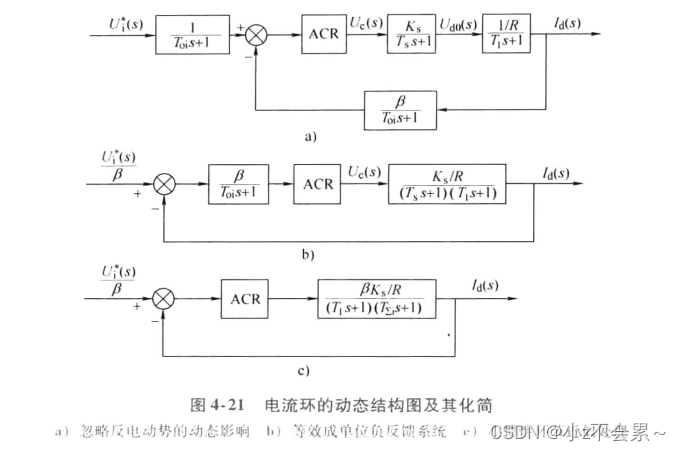
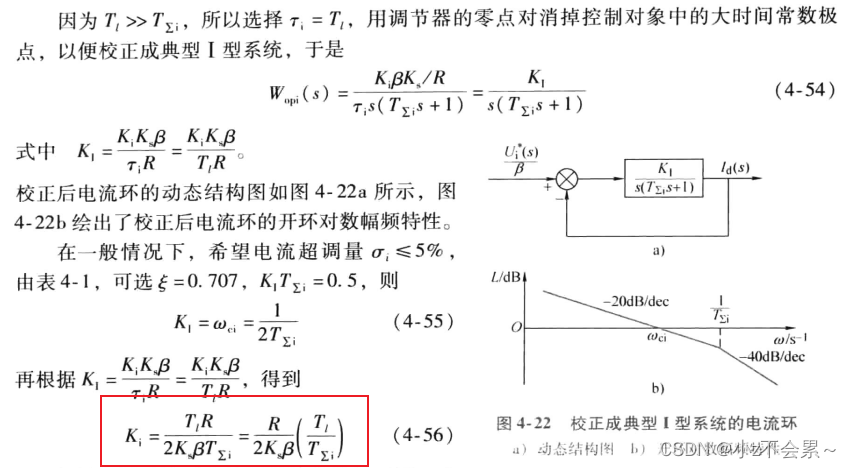
电流的闭环控制改造了控制对象,把双惯性环节的电流环控制对象近似地等效成只有较小时间常数的一阶惯性环节,加快了电流的跟随作用,这正是局部闭环(内环)控制的一个重要功能。当然前提是超前环节恰好对消掉控制对象中的大惯性环节,如果电机参数测量不准,大惯性环节并未被准确对消,就会影响电流环的动态性能。这是电流环按照典型i型系统设计的缺点。
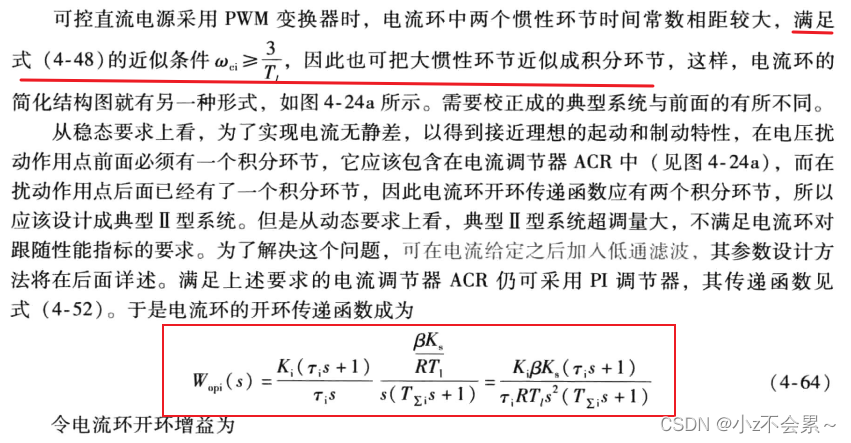
按照典型ii型系统设计电流调节器
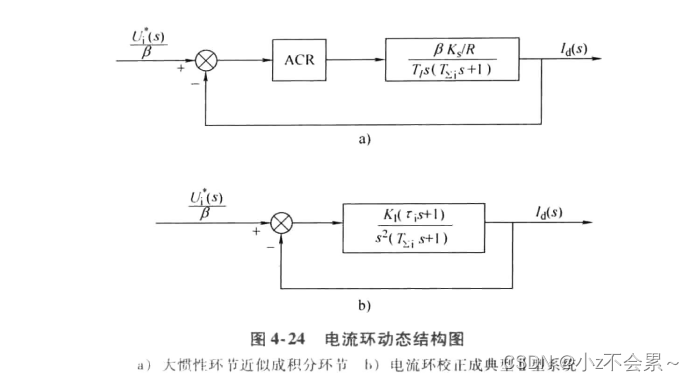
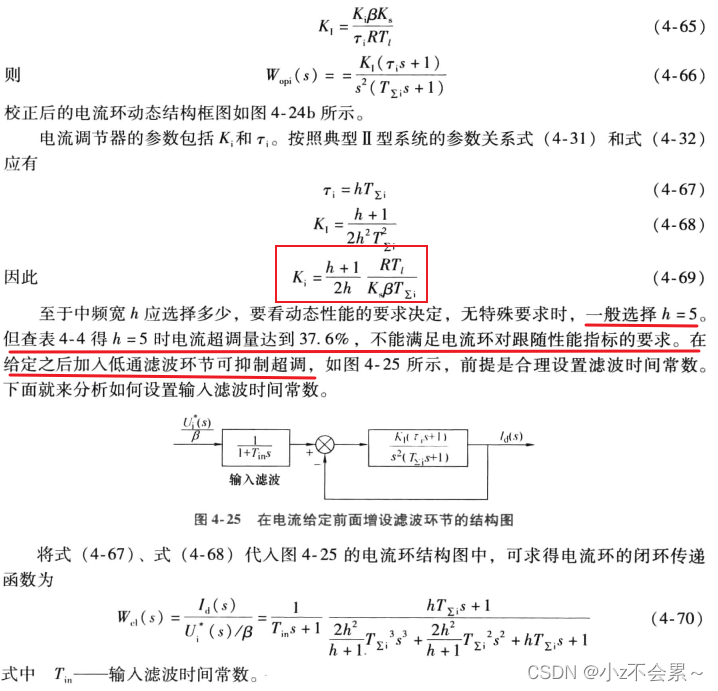
按照典型ii型系统设计电流调节器,也达到了改造控制对象的目的,把双惯性环节的电流控制对象近似地等效成只有较小时间常数的的一阶惯性环节,加快了电流的跟随作用,由于为了抑制超调,在给定信号出加入了滤波环节,所以电流环的响应速度有所下降。
总结
上述介绍的比较详细,也可直接看结论,若按照典型i型系统设计,电流环在转速环中可等效为一阶惯性环节:,惯性时间常数为
,若按照典型ii型系统设计,电流环在转速环中可等效为一阶惯性环节:
,惯性时间常数为
.
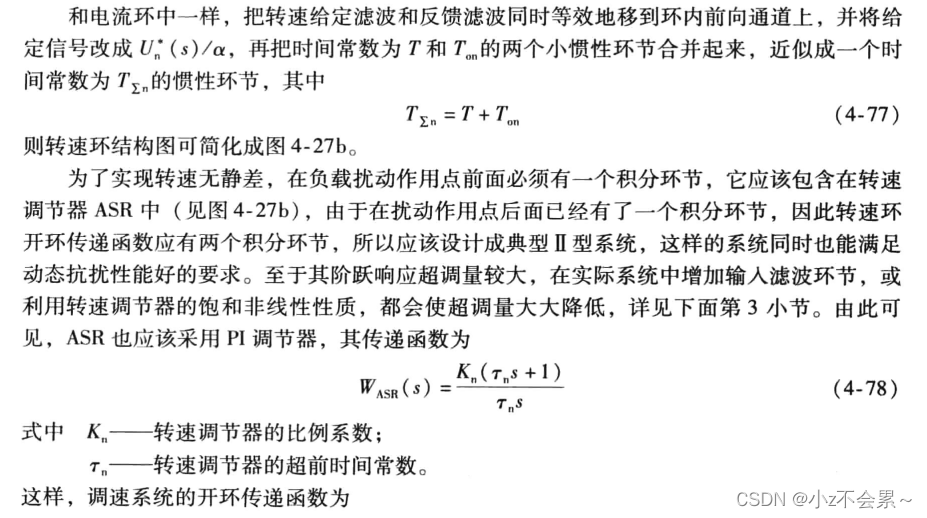
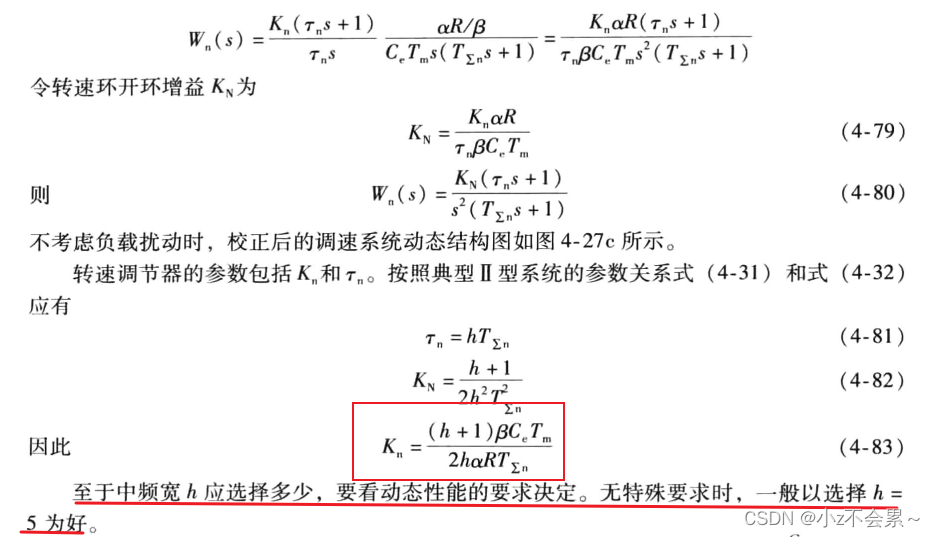
2. 转速调节器的设计
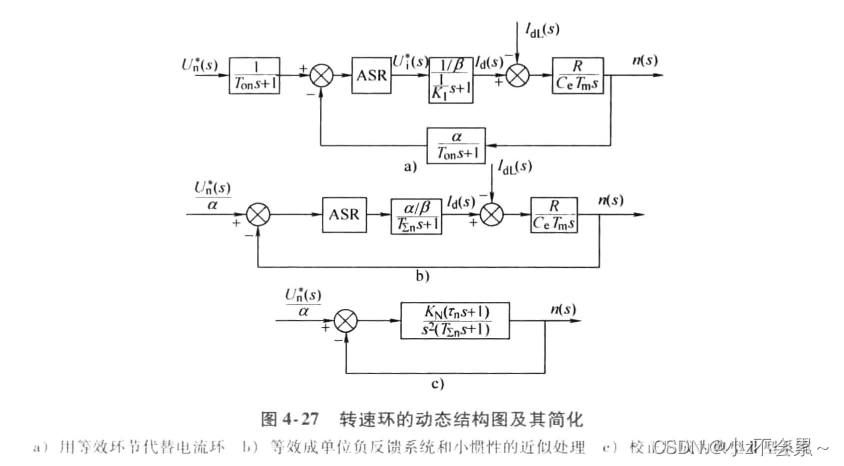
外环的响应比内环慢,这是按上述工程设计方法设计多环控制系统的特点。这样做虽然不利于快速性,但每个控制环本身都是稳定的,对系统的组成和调试工作非常有利。
3. 弱磁控制的介绍
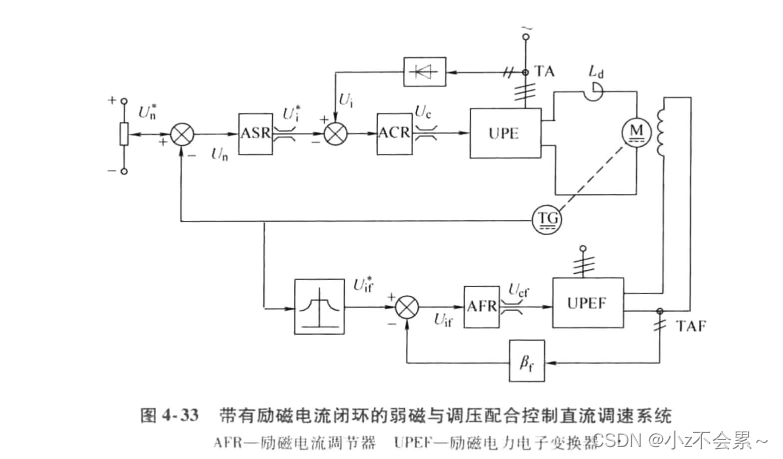
恒转矩调速和恒功率调速
按照电力拖动原理,在不同转速下长期运行时,为了避免电动机过热,都应使电枢电流小于或等于额定值。于是,在变压调速范围内,因为励磁磁通不变,电磁转矩
,允许的转矩也不会变,称作“恒转矩调速方式”。而在弱磁调速范围内,转速越高,磁通越弱,容许的转矩不得不减小,转矩与转速的乘积则不变,即容许功率不变,称为“恒功率调速方式”。
由图4-32可知,当负载要求的调速范围更大时,就不得不采用变压和弱磁配合控制的方法,即在基速以下保持磁通为额定值不变,只调节电枢电压,而在基速以上则把电压保持为额定值,减弱磁通升速。弱磁控制在实际工程中应用相对广泛。
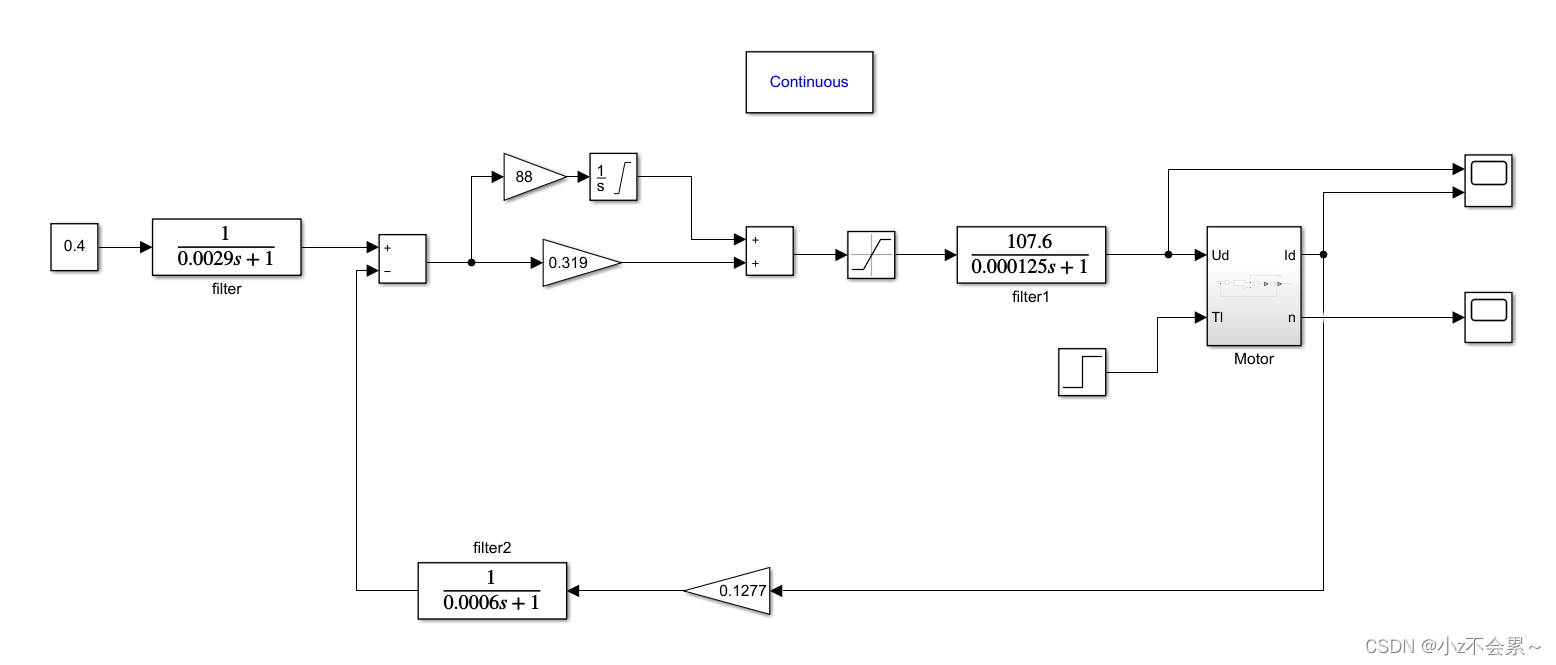
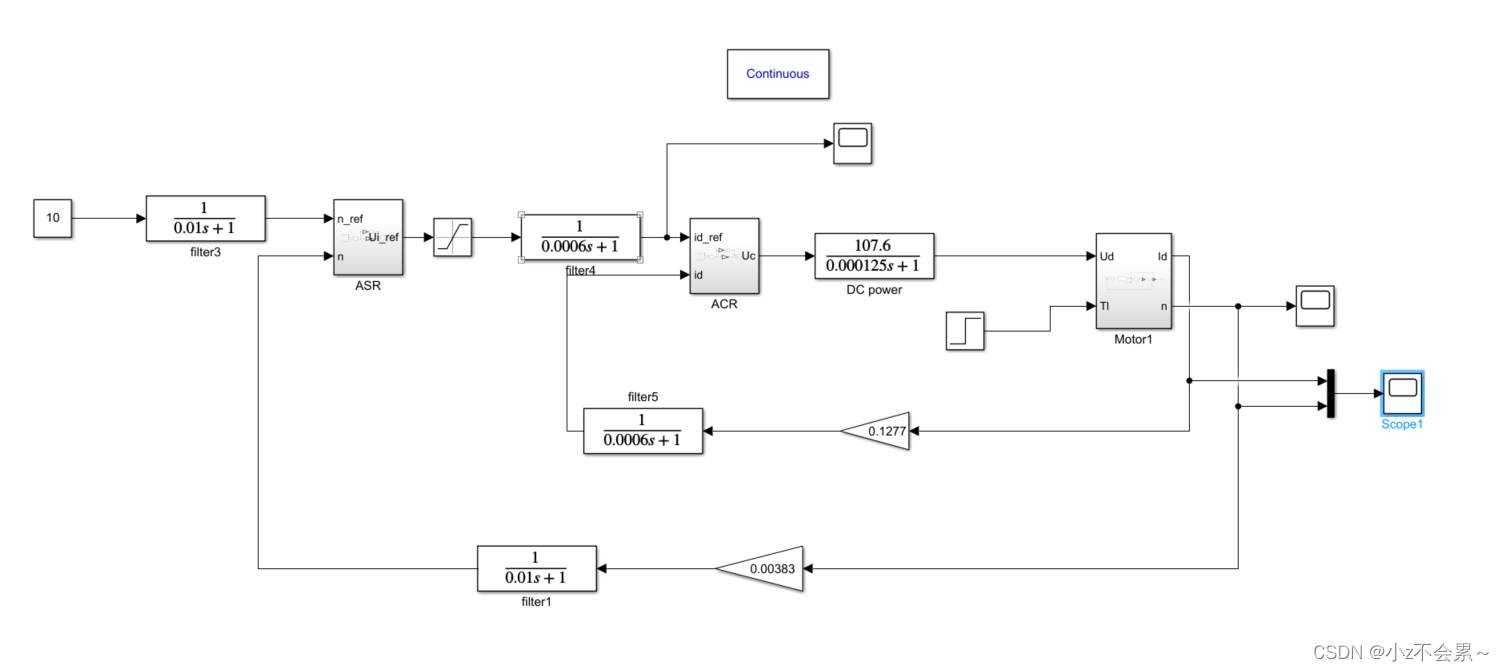
4. 双闭环直流调速系统仿真
电流环的仿真
第一组PI参数
以KT=0.25的关系式按典型i型系统的设计方法得到了PI调节器的传递函数为。

观测结果,可以发现,无超调但上升时间较长
第二组PI参数
以KT=1的关系式按典型i型系统的设计方法得到了PI调节器的传递函数为。
观察结果,可以发现,上升时间变短了,但超调比较大,这也说明了系统的快速性和稳定性是矛盾的。
第三组PI参数
把电流环校正成典型ii型系统时,按照计算PI调解器参数,PI调节器的传递函数为
。
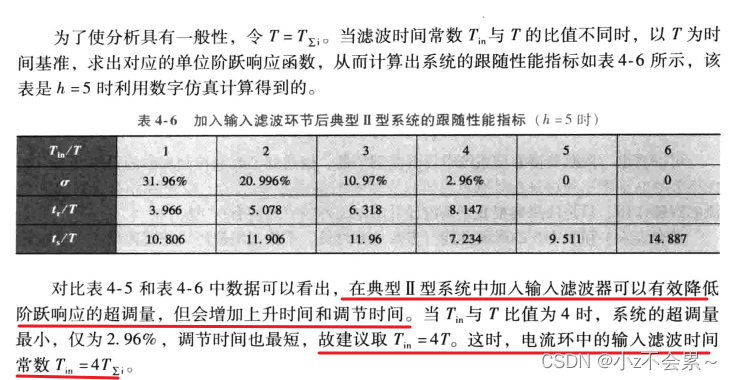
观察结果,上升时间短,存在较大超调,根据前文提到的表4-6中滤波时间常数和超调量之间的关系可知,这时可增大滤波时间常数来使超调量降低,但这样会牺牲一定的快速性。为了抑制超调量,此时将输入滤波传递函数改为。
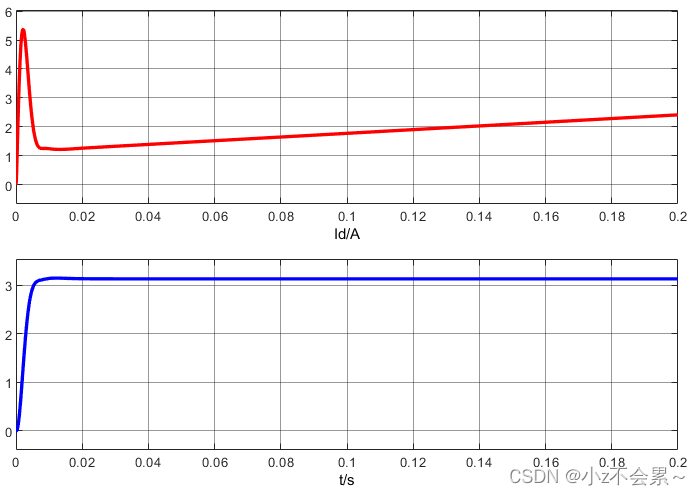
观察结果发现,系统无超调,但是上升时间变长。
转速环的系统仿真
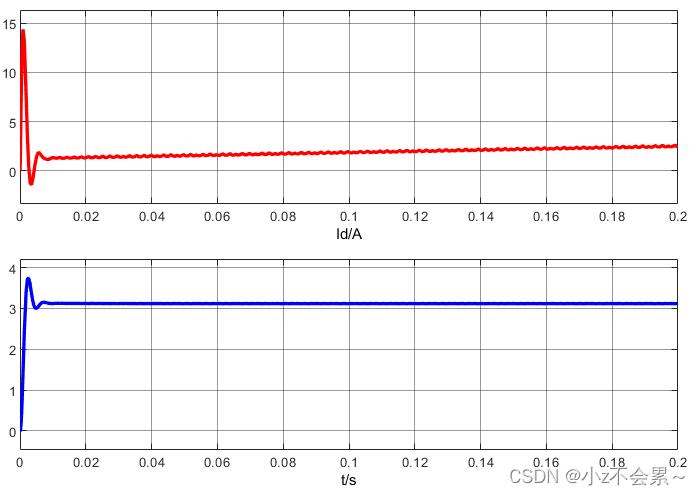
转速环空载起动
PI参数采用典型ii型系统设计,其传递函数为.
ASR调节器经过了不饱和、饱和、退饱和三个阶段,最终稳定运行于给定转速,而恒流升速是主要阶段。
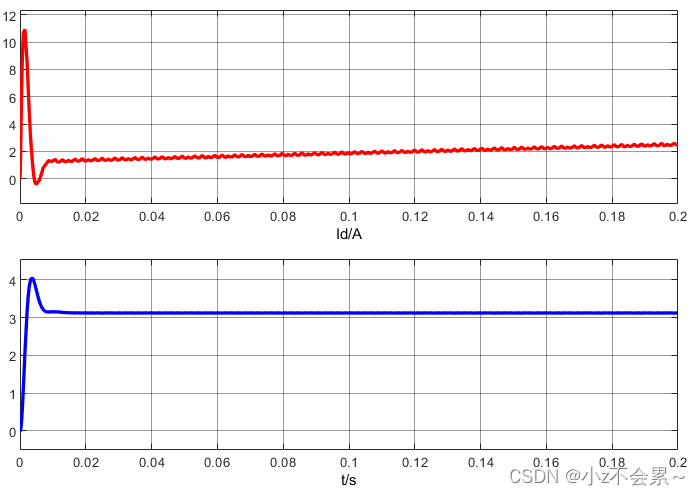
转速环满载起动
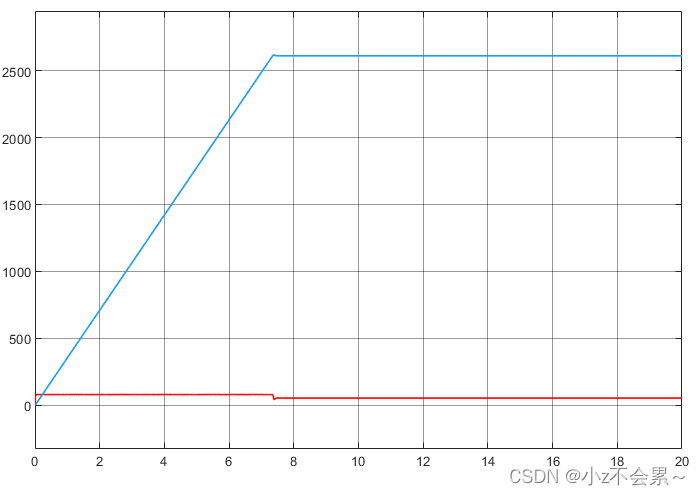
如把负载电流设置为52.5,满载起动,其转速与电流响应曲线如上图所示。
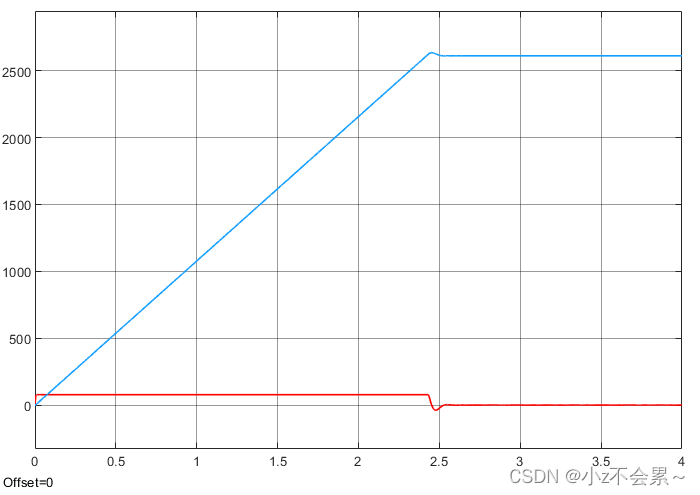
空载起动,稳定后突加负载扰动
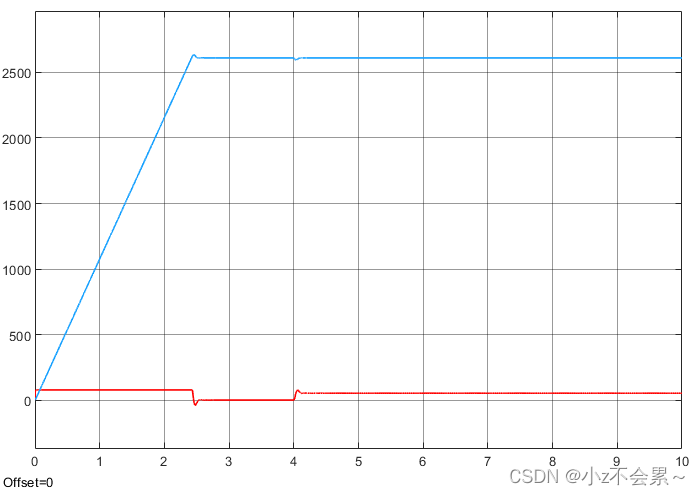
空载起动到稳定运行后在4s时受到额定负载扰动,从上图可以看出,加载后转速下降,电流上升拉动转速再次上升,稳态时仍为给定转速。
以上内容均摘自《电力拖动自动控制系统》第四章,这里摘取了重点内容做一个汇总,方便以后自己查阅,感谢大家的阅读!!^_^

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









