






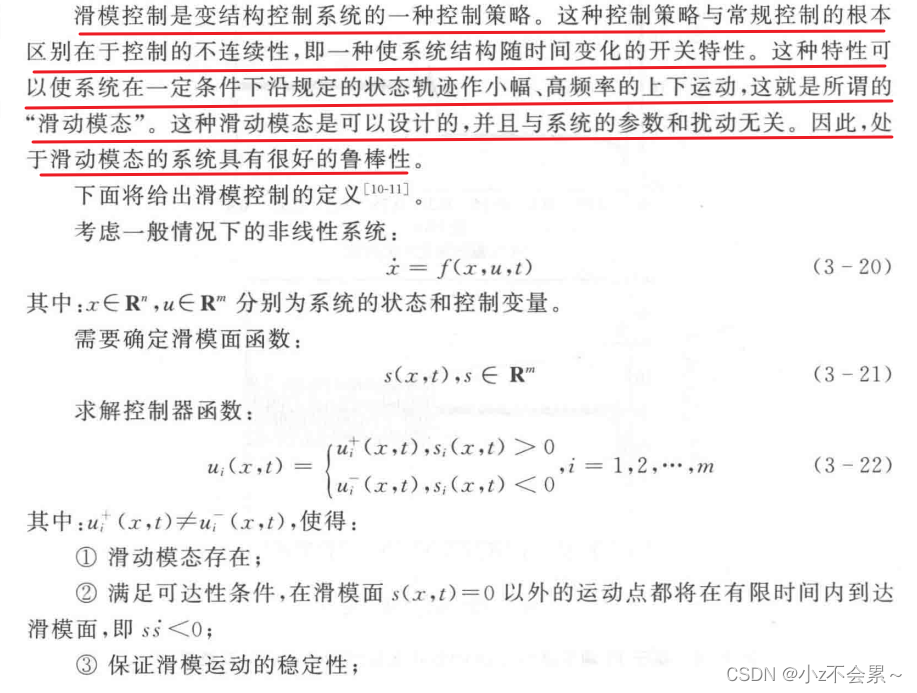
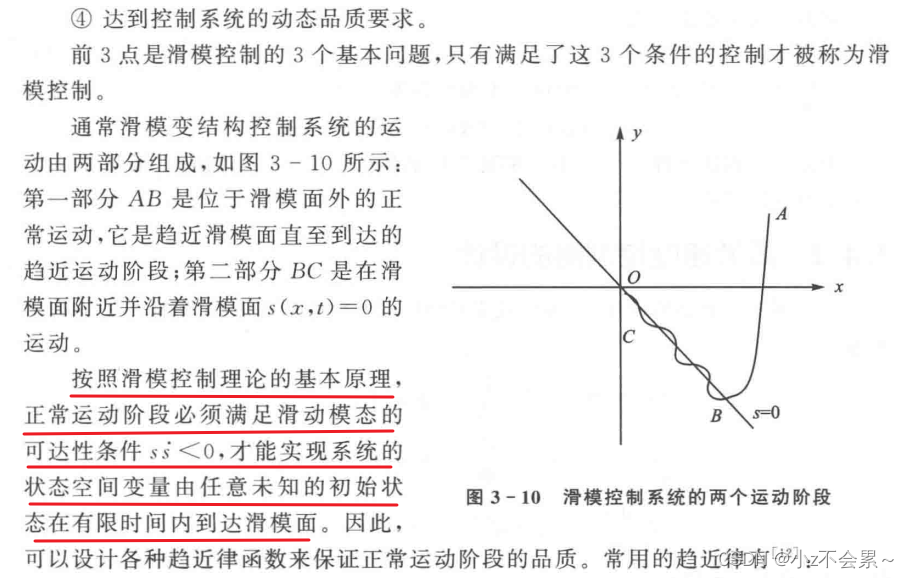
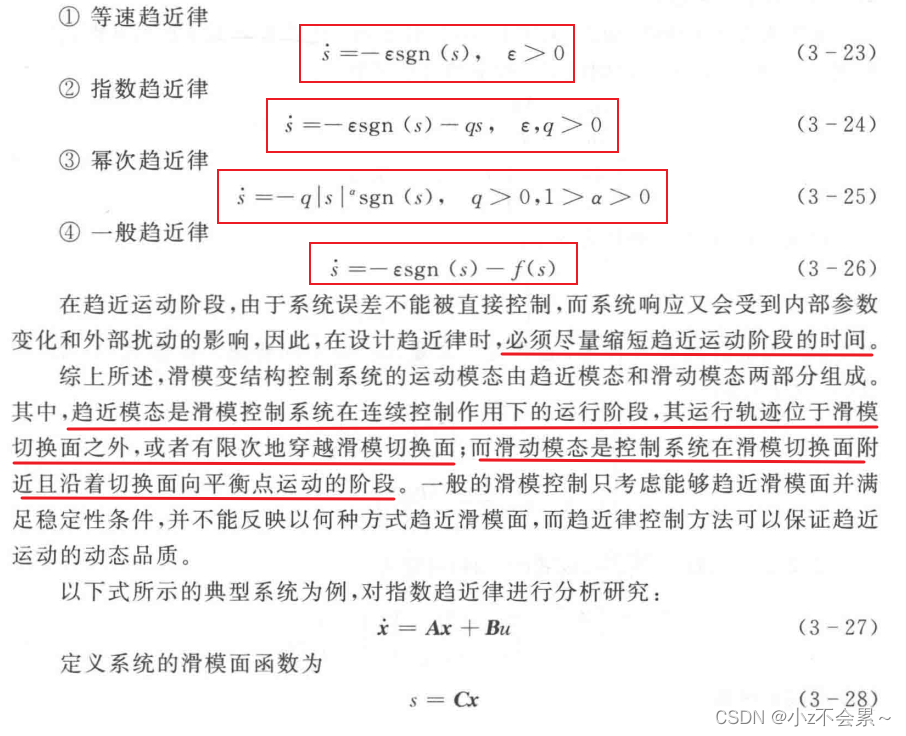
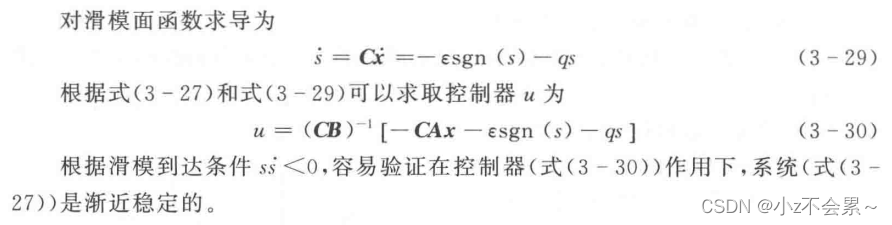
1 滑模控制的基本原理
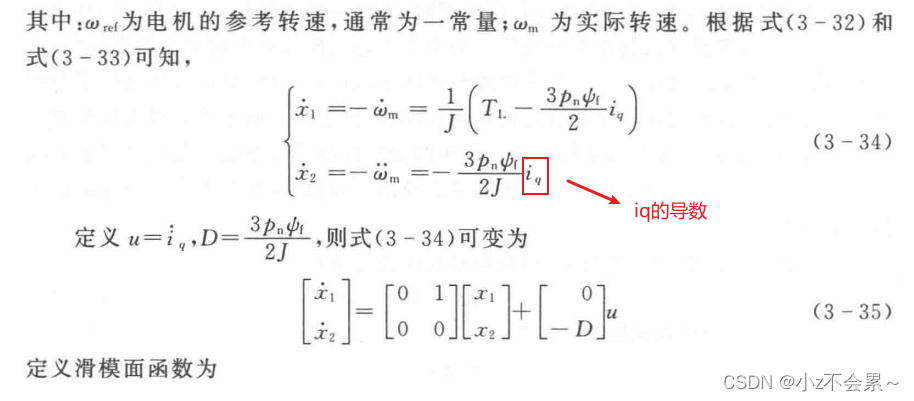
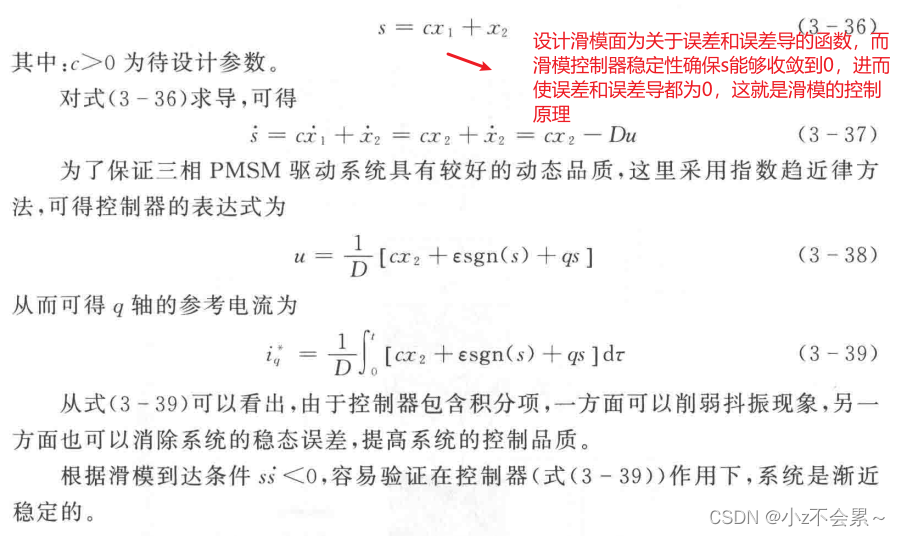
2 永磁同步电机滑模控制器的设计

3 仿真结果验证
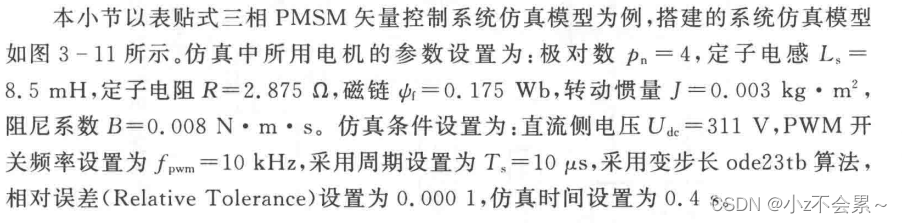
电机及相关参数设置
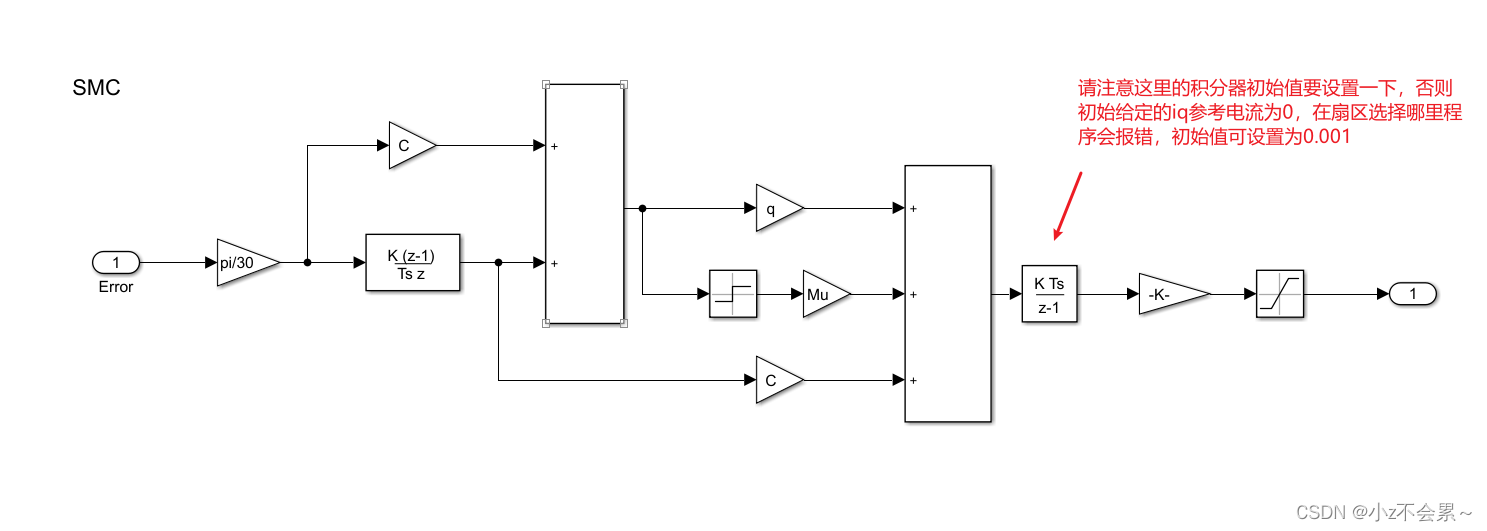
滑模控制器
整体双闭环框图
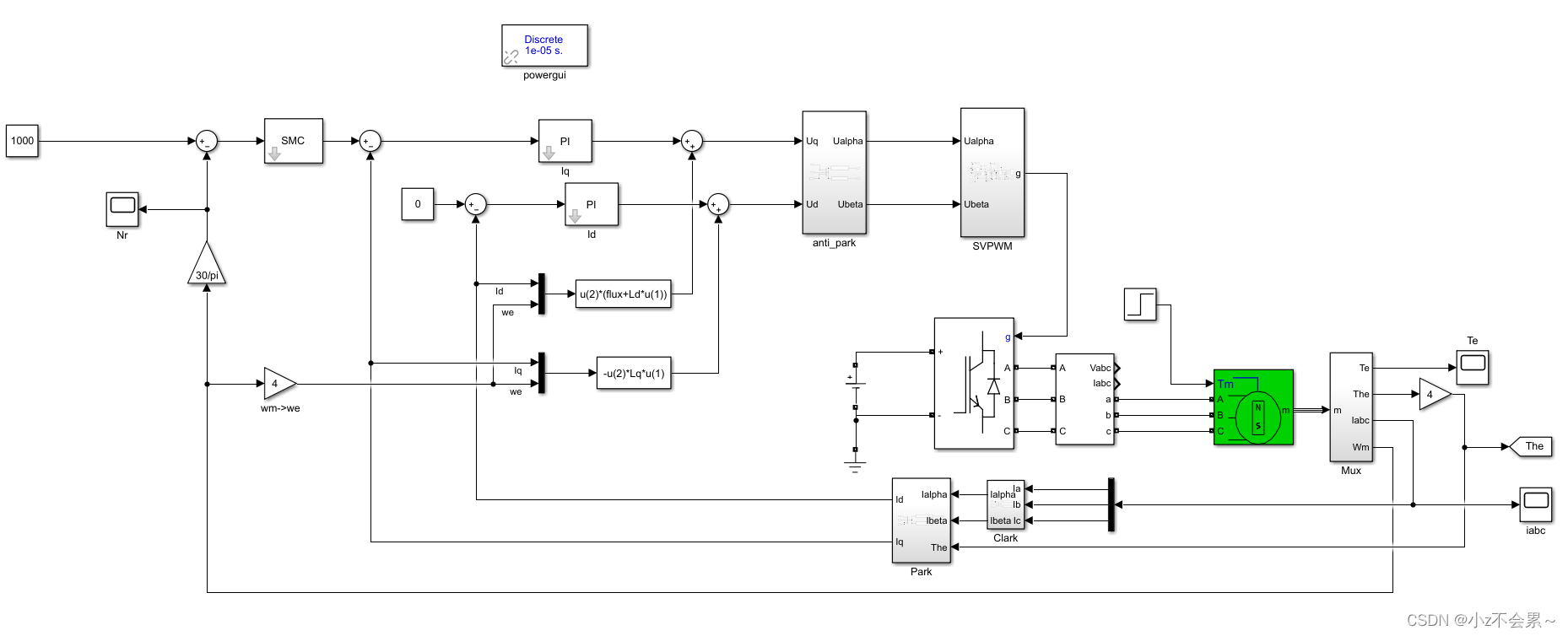
仿真结果
仿真条件设置:参考转速,初始时刻负载转矩
,在
时负载转矩
,滑模控制器参数设置为:
,仿真结果如下:
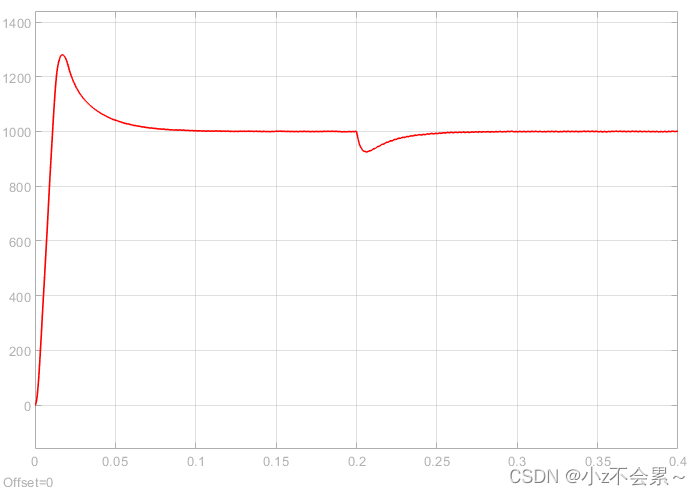
转速
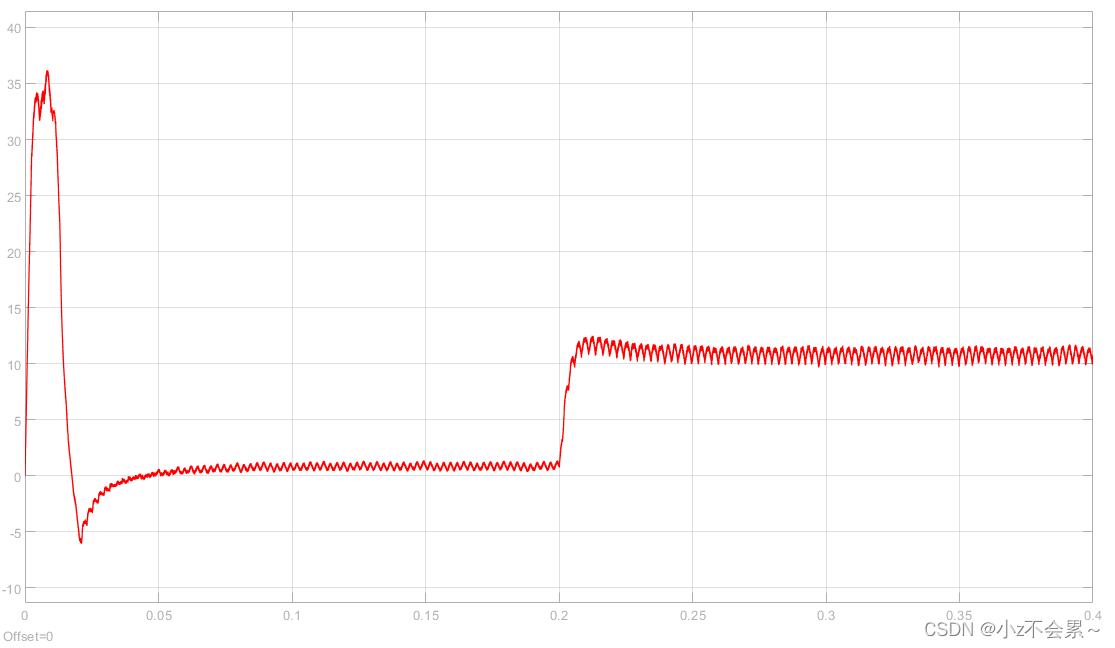
电磁转矩的变化曲线
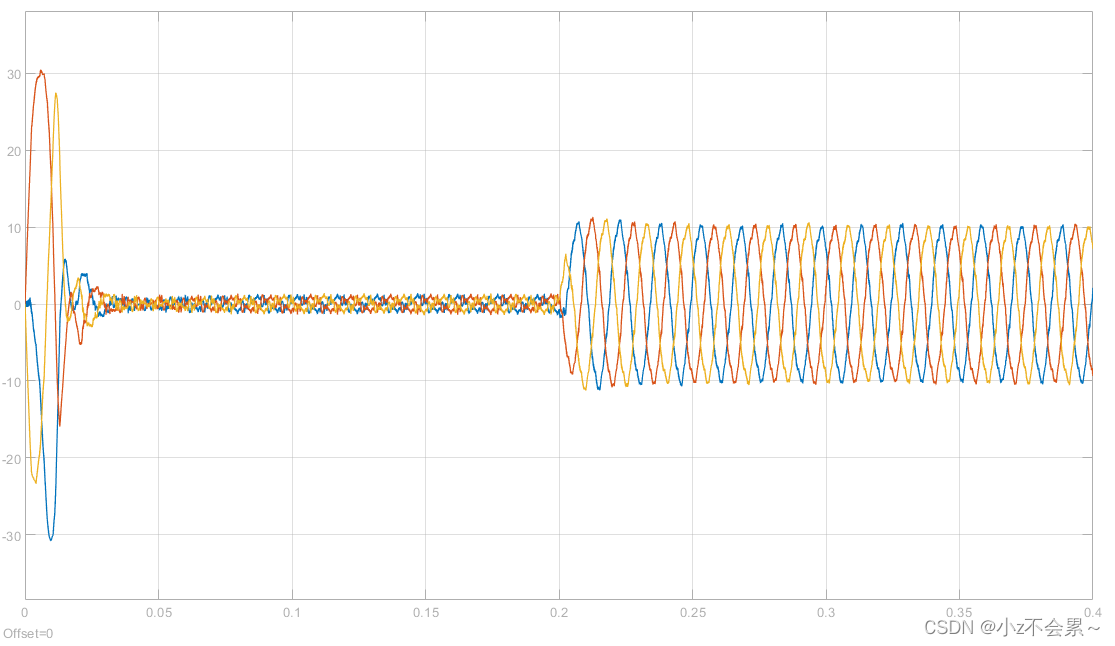
三相电流的变化曲线
观察以上仿真曲线,虽然开始时电机转速有一些超调量,但仍然具有较快的动态响应速度,并且在t=0.2s时突加负载转矩,电机也能快速恢复到给定参考转速值,从而说明所设计的滑模速度控制器具有较好的动态性能,能够满足实际电机控制性能的需要。
但是常规滑模控制,存在一定的抖振,观察转速曲线可以看出,可以通过改进sign()函数,来改善抖振。
本文内容摘自袁雷的《现代永磁同步电机控制原理及MATLAB仿真》的第三章,自己做了一下PMSM双闭环滑模控制的仿真,这里做一个记录,方便以后查阅,该控制方案对实际工程也有一定的启发,感谢大家的阅读!!!^_^

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









