






(1)AVM下线标定场地简介
AVM系统下线标定场地由以下6部分组成:标定工位地面及暗室、标定识别块、车辆定位装置、不透光遮光帘、场地照明、下线标定设备
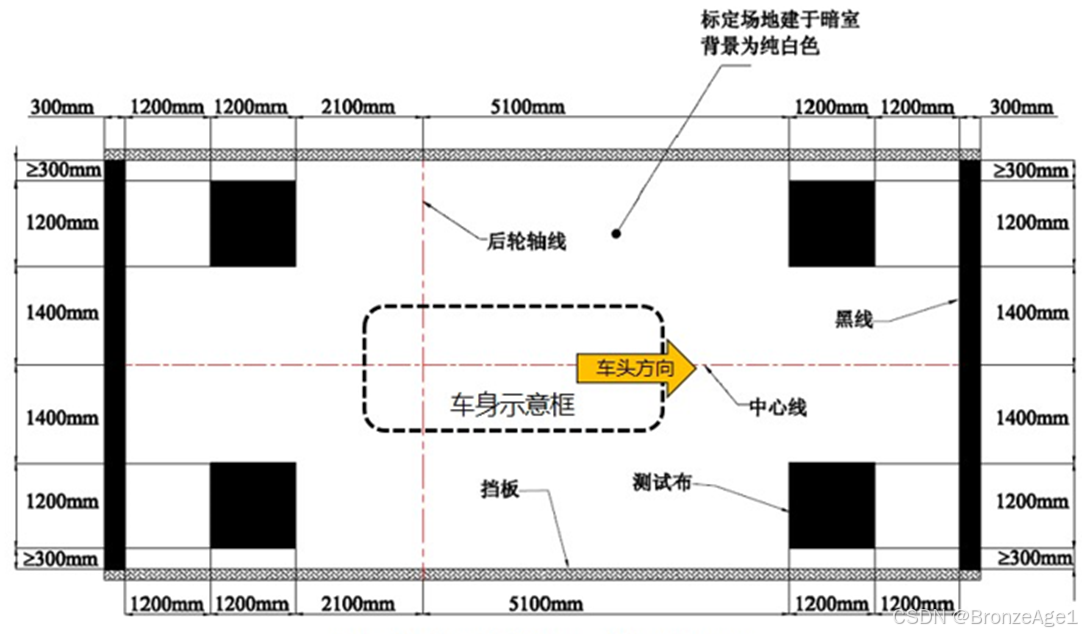
(2)地面规划
依据AVM前/后/左/右各2m的拼接区域和静态辅助线标定区域设置,规划如下:
- 位于室内,整体背景颜色为白色(漆不反光白漆)。
- 场地平整度:标定场地地面平整,标定工位地面平整度精度要求为±5mm。(地平线:坡度范围在±0.3°以内)
- 场地总大小:6.5m*13.4m,不能小于其值。
- 油漆颜色:场地漆色采用白色和黑色。白色采用劳尔色号RAL9016交通白,其对应RGB值为255,255,255;黑色采用劳尔色号RAL9017交通黑,其对应黑色RGB值为7,7,7。
- 油漆类型:场地漆采用不反光雾面漆。
- 漆面维护:避免场地使用一段时间后漆面老化脱落,干扰自动标定成功率和效果;定期清洁标定场地,避免灰尘、污渍,水渍等杂物干扰自动标定。
- 要求规划独立的标定场地工位,不需要进行AVM标定的车辆不能经过AVM标定场地。
- 场地规划示意图如下图所示,尺寸精度要求±5mm。
(3)标定识别块特性
- 标定识别块大小:1200mm*1200mm(±5mm)。
- 标定识别块形状特性:场地施工时需保证标定块为正方形,四角为直角,四边为直边。
- 标定识别块材质:劳尔色号RAL9017交通黑,无反光雾面漆。
- 标定识别块安装精度要求:标定识别块实际安装位置与目标位置在X/Y/Z轴方向的偏差应小于1mm
(4)车辆定位要求
AVM下线自动标定对车辆定位有严格要求,标定场地需要配备车辆定位装置(后轴定位),车辆定位要求如下:
- 车辆后轴中心纵向偏移距离小于3mm。车辆前/后轮轴中心横向偏移距离小于5mm。
- 车辆定位后每个轮胎的站立面应处于同一水平面上,水平度应满足±5mm的精度要求。
- 车辆定位装置需支持多轮距车型定位均能满足定位精度要求。
- 车辆停放在定位装置上以后,操作员在车内能触发车辆定位装置进行车辆摆正操作。
- 车辆定位装置建议采用车辆自动摆正器。
- 标定场地为多款车共用,定位装置长度为共用车型的最小车长,且定位装置不能超过图中的蓝色阴影区域范围。

车辆定位装置示意图
(5)暗室
AVM下线自动标定对标定场地的光线要求较严格。若外界光线干扰到标定场地,标定场地识别块有反光,将会影响自动标定成功率及标定效果。因此,标定场地须设置暗室。标定场地暗室需求如下:
- 四周及上方不可透光。若有窗户,须布置遮光帘,且遮光帘不可透光。
- 暗室内光照均匀,标定场地地面不能存在阴影和部分光线过强的问题。暗室四周及左右挡板表面应为亚光材料,不能出现反光现象。
- 车辆停放于标定场地上时无强光直射摄像头。
- 暗室的车辆驶入方向和车辆驶出方向应设置自动感应式电动卷闸门。自动标定时前后卷帘门应自动关闭,避免前后车辆车灯干扰到标定场地内光照情况,标定结束后卷帘门自动打开,方便车辆进出。
- 暗室顶部靠近驾驶员车窗位置建议设置自动升降的工作台,方便操作员放置标定工具。自动升降台不能遮挡到车辆摄像头视野,升降台灯光阴影不能干扰到标定块图案,升降台需方便不同车型的车辆通过。
(6)场地照明
为了保证AVM自动标定的效果及成功率,标定场地地面需要确保照度均匀。场地灯光需要满足以下要求:
- 光源高度:约为3m~4m。
- 光源类型:白光,色温范围5000K~6500K。
- 照度:遵从CNS国家标准,地面照度测量值为200Lux~700Lux。标定场地地面照度均匀,场地内任意一米范围内照度差应小于50Lux。
- 灯光不直射车辆摄像头。
- 灯光不斜照地面,避免标定识别块反光。
(7)下线标定设备
标定场地需配备下线标定设备,下线标定设备通过OBD与车身连接后可触发AVM自动标定,并对标定状态及结果进行显示和记录。

















 1349
1349

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









