







前言与目录
ZEMAX优化方法介绍;在光学系统自动设计中,优化设计是光学设计中的重要阶段,也是ZEMAX软件的核心功能,涉及评价函数、权因子、阻尼因子等重要概念。在常用的阻尼最小二乘法优化设计的基础上,ZEMAX给我们提供了三种优化选择:Optimization(局部优化)、Global Search(全局优化)和 Hammer Optimization(锤形优化)。
目录
一、ZEMAX优化方法介绍
在光学系统自动设计中,优化设计是光学设计中的重要阶段,也是ZEMAX软件的核心功能,涉及评价函数、权因子、阻尼因子等重要概念。在常用的阻尼最小二乘法优化设计的基础上,ZEMAX给我们提供了三种优化选择:Optimization(局部优化)、Global Search(全局优化)和 Hammer Optimization(锤形优化)。

1、局部优化(Local Optimization):
局部优化是一种从系统初始结构出发,寻找局部最小值的优化方法。它依赖于初始结构,优化过程中评价函数逐渐降低,直至达到最低点,这个最低点可能是局部最优而非全局最优。这里的最低点是指再优化评价函数就会上升,不管是不是优化到了最佳结构(软件认为的最佳指评价函数最小的结构)。
局部优化的缺点包括:
依赖初始结构:如果初始结构选择不当,可能会陷入较差的局部最优解,无法得到全局最优的设计结果。
搜索范围有限:通常只在初始结构附近的解空间内进行搜索,可能导致优化结果受限于初始结构的邻域,无法探索到更广泛的解空间。
可能陷入局部最优:特别是当评价函数存在多个局部最小值时,优化方法容易陷入局部最优解,而不是全局最优解。
2、全局优化(Global Optimization):
全局优化是一种全域搜索方法,使用多起点同时优化的算法,目的是找到系统所有可能的结构组合,并判断哪个结构使评价函数值最小。
全局优化的优势在于更有可能找到全局最优解,因为它考虑了更多的解空间,这对于复杂的光学系统设计特别有用。
然而,全局优化的局限性在于通常比局部搜索更慢,因为它需要评估更多的解,且可能受到计算资源的限制,特别是在处理大型和复杂的光学系统时。
3、锤形优化(Hammer Optimization):
锤形优化是ZEMAX提供的全局优化方法的一种,它结合了全局搜索和局部优化的特点。锤形优化在全局搜索找到最佳结构组合后,进一步锤炼这个结构。
锤形优化加入了专家算法,可以帮助设计师按照有经验的设计方法处理系统结果。它不仅关注形状的优化,还通过调整玻璃类型和渐晕等参数来进一步提升系统性能。
锤形优化适用于先用全局优化找到大概值后,进一步完善光学系统。
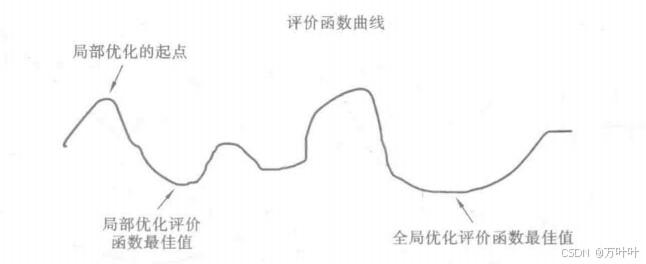
图1中的执行优化就是指执行局部优化;而 Global Search 和 Hammer Optimization 都属于全局优化类,只要给出足够多的优化时间,它们总能找到最佳结构。全局优化使用多起点同时优化的算法,目的是找到系统所有的结构组合形式并判断哪个结构使评价函数值最小。而锤形优化虽然也属于全局优化类,但它更倾向于局部优化,一旦使用全局搜索找到了最佳结构组合,便可使用锤形优化来锤炼这个结构。图2可以很好地说明全局优化和局部优化的关系。
二、阻尼最小二乘法和正交下降法(自适应法)
目前国内外成像光学系统自动设计主要基于ZEMAX和CODEV两种软件,二者各有特点。在光学系统自动设计中,优化设ZEMAX窗口简洁明了,便于操作,价格低,使用更广泛。
光学系统自动设计通常采用两种方法:阻尼最小二乘法和自适应法。其中,阻尼最小二乘法应用更广泛,主要原因在于:
①阻尼最小二乘法能自然确定镜头设计的优化函数为一组像差的平方和;
②对于给定的设计参数,阻尼最小二乘法能自动给出一组最佳的参数变化量;
③虽然像差是非线性函数,但当像差接近最小值时,像差可看作是线性的。目前国内外成像光学系统自动设计主要基于ZEMAX和CODEV两
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









