







前言与目录
介绍球差概念,什么是轴上球差和垂轴球差,带球差,以及球差如何校正;同时也结合zemax更详细的解释球差,如何判断球差大小,和如何进行球差控制;希望可以简单易懂,也尽量详细,同时内容都有意义。
目录
1、轴上球差(Axial Spherical Aberration)
2、垂轴球差(Tangential Spherical Aberration)
正文
一、球差的定义
当光入射到单个透镜上时,无限靠近光轴的光线将聚焦到近轴像的位置。随着透镜上光线高度的增加,像方空间中光线与光轴相交,即聚焦的位置越来越靠近透镜。这种随孔径变化的焦点位置的变化称为球差(sphericalaberration),也称球面像差。
可以看到,不同孔径或者说位置入射到透镜上,聚焦的位置不同;

轴上物点的物距L确定时,其像点位置L'是孔径角U(或h)的函数,实际像点与理想像点的位置之差,叫做球差。球差(Spherical aberration)亦称球面像差。轴上物点发出的光束,经光学系统以后,与光轴夹不同角度的光线交光轴于不同位置,因此,在像面上形成一个圆形弥散斑,这就是球差。一般是以实际光线在像方与光轴的交点相对于近轴光线与光轴交点(即高斯像点)的轴向距离来度量它。

对于单色光而言,球差是轴上点成像时唯一存在的像差。轴外点成像时,存在许多种像差,球差只是其中的一种。除特殊情况外,一般而言,单个球面透镜不能校正球差,正透镜产生负球差,负透镜产生正球差(如下图的负球差)。对一定位置的物点而言,当保持透镜的孔径和焦距不变时,球差的大小随透镜的形状而异。因此,以适当形状的正、负透镜组合成的双透镜组或双胶合镜组是可能消球差的一种简单结构。保持透镜的焦距不变而改变透镜形状,犹如把柔软的物体弯来弯去,故被称为透镜的整体弯曲,它是光学设计时校正像差的一种重要技巧。

也可以理解为近轴光线产生的焦点位置,与轴外光线产生的焦点位置之间的距离,就是球差大小,这个也是轴上球差的概念
二、球差的形成原因
不同孔径角U的光线交光轴于不同点上,相对于理想象点的位置有不同的偏离。

球差是轴上点唯一的单色像差。

对于我自己而言,是按照菲涅尔折射原理去理解的,供参考一下:
-
菲涅尔折射定律的非线性:菲涅尔折射定律的公式是非线性的,在近轴条件下是近似线性的,高斯公式才成立。越偏离轴偏转能力越强,导致不同孔径区域的光束最后汇集在光轴的不同位置。
按这个原理,很容易就理解了为什么正透镜产生负球差,负透镜产生正球差,就是由于越偏离轴的位置,偏转能力越强,聚焦在了不同的位置上;
三、球差的大小和度量
对于球差的描述,应该先理解什么是轴上的球差和垂轴上的球差,顾名思义,如下图,对于不同的角度入射(不同的孔径角U),或者不同的孔径大小(h和hm);按不同的描述有𝛿𝐿′和𝛿T′,在光轴方向之间的差值就是轴上球差,垂轴上的差值就是垂轴球差;

1、轴上球差(Axial Spherical Aberration)

轴上球差是指轴上物点发出的光束通过透镜时,不同孔径区域的光束最后汇集在光轴的不同位置,在像面上形成圆形弥散斑。轴上球差的计算公式为:
𝛿𝐿′=𝐿′−𝑙′
其中:
- 𝛿𝐿′是轴上球差;
- 𝐿′是实际焦点到像面的距离;
- 𝑙′是理想焦点到像面的距离。
轴上球差的符号规则是从理想像点计算到实际光线交点。如果实际光线交点在理想像点之后,则球差为正;如果在之前,则球差为负。
2、垂轴球差(Tangential Spherical Aberration)

垂轴球差是指由于轴上球差的存在,导致点物经系统之后所成的不再是点像而是一个弥散斑。垂轴球差的计算公式为:
𝛿𝑦′=𝛿𝐿′⋅tan𝑈′
其中:
- 𝛿𝑦′是垂轴球差;
- 𝛿𝐿′是轴上球差;
- 𝑈′是光线与光轴的垂轴角度。
垂轴球差描述了光线在像面上的垂直偏移量,这个偏移量与轴上球差和光线与光轴的角度的正切值成正比。
3、正球差、负球差
一般描述球差的正负,都是针对于轴上球差去描述的,我们应该知道,一般规定沿着光轴向右就是正,所以:
𝛿𝐿′ 符号规则:由理想像点计算到实际光线交点;
𝛿𝐿′ >0 --- 正球差:
𝛿𝐿′<0 --- 负球差:
四、球差曲线
显然,与光轴成不同孔径角U的光线具有不同的球差。孔径角对应的入射光线高度
称为全孔径,对应的球差称为边光球差,用
表示;若 h/hm=0.707,则称之为 0.707 孔径或 0.707 带光,对应的球差称为0.707带光球差,用
表示;其他带光球差,如
、
、
等,也可类推称之。进一步类推到视场,若视场中 y/ym=0.707,也可称之为0.707带视场。
垂轴球差表示由轴向球差引起的弥散圆半径,用来度量球差大小。但平常所说的球差一般指的是轴向球差 𝛿𝐿′。
在垂轴平面内度量的球差称为垂轴球差(也称横向球差),用符号 表示,其表达式为:
(公式1)
对应最大孔径角Umax入射光线的高度hmax被称为全孔径(边光球差)。

若![]() ,则称为0.7孔径或0.7带光(带光球差)。
,则称为0.7孔径或0.7带光(带光球差)。
由于球差校正不足而产生如下形式的曲线:

由于球差过校正而产生如下形式的曲线:

五、球差的表示方法
已知球差是入射光线高度
或孔径角
的函数,并且在轴上视场产生时为旋转对称像差,故在级数展开式中只能包含
或
的偶次项。当h=0或U=0时,
=0,因此展开式中没有常数项。此外,球差是轴上点像差,与视场无关,所以展开式中就没有视场
或
项。因此球差的级数展开式可表示为:
(公式2)
式中,第一项称为初级球差,第二项为二级球差,第三项为三级球差,以此类推。除了第一项初级球差,后面的球差统称高级球差。A1、A2,A3 分别为初级球差系数、二级球差系数和三级球差系数。大部分光学系统二级以上的更高级的球差很小,可以忽略。因此,球差可近似用初级球差和二级球差两项来表示。在绘制球差曲线的时候,通常把纵坐标取为h/hm,所以球差也可以表示为 :
(公式3)
初级球差的大小与结构参数r、d、n密切相关,而高级球差的数值则相对固定,所以校正球差的过程实际就是改变初级球差,让它和后面的高级球差等大反号,以平衡掉后面的高级球差,这是像差校正的基本思想。
初级像差只包含孔径和视场的低级次项,对大的孔径和视场失去意义。设计光学系统时要进行大量的初级像差计算,只有当初级像差达到预定值后,才有必要全面计算一次实际像差。通过对实际像差的全面分析、评价,进而定出初级像差的目标值,重新修改结构参数。如此反复进行,逐步优化,直到获得像差的最佳校正和平衡为止。
德国科学家赛德尔首先提出了具有对称轴的光学系统的初级像差理论。对于已知结构(r、d、n)的光学系统,当物距和入射光瞳位置给定时,空间光线通过光学系统的单色像差近似取决于视场和孔径。像差展开为级数时,在视场和孔径为零的情况下,像差也为零,赛德尔用和数 分别表示初级球差、初级彗差、初级像散、初级场曲、初级畸变。所以常把这五个和数分别称为第一、第二、第三、第四、第五赛德尔和数。
由于光学系统是由多个光组构成的,而每一个折射面都将对整个系统的球差有所贡献,整个系统的球差值就是各个折射面产生的球差传递到系统像空间后相加而成的,故称每个折射面对系统总球差的贡献量值为球差分布。所谓的球差分布式是指构成系统的每个面对球差的贡献,其形式为
(公式4)
公式中为光学系统的球差系数,S为每个面上的球差分布系数;
因初级球差在近轴区内有意义,而在这个区域内角度很小,所以角度的正弦值可以用弧度值来代替,初级球差可以表示为
(公式5)
其中:
公式中, 为初级球差系数(也称第一赛德尔和数),S1为每个面上的初级球差分布系数;
六、球差的影响
整个孔径光束的垂轴球差在像面上形成了一个对称于光轴的圆形弥散斑,严重时使轴上点成像变得模糊不清。
1、图像模糊
球差会导致成像系统产生的图像模糊,因为光线不能精确聚焦在一个点上,而是形成一个弥散斑。这种模糊会降低图像的清晰度和对比度。
2、分辨率降低
由于球差引起的光斑扩散,成像系统的分辨率会受到影响。在理想情况下,点光源应该在像平面上形成一个点像,但球差会导致点像扩散,使得相邻的点源无法区分,从而降低系统的分辨率。
3、对比度下降:
球差会导致图像的对比度下降,因为光线没有集中在一个点上,而是分散开来,导致图像的亮暗对比减弱。
4、光晕和眩光:
在强光源或高亮度区域附近,球差可能导致光晕和眩光现象,这是因为光线没有正确汇聚,而是在像平面上形成了额外的光斑。
5、色彩失真:
对于彩色成像系统,球差可能导致色彩失真。不同波长的光(即不同颜色的光)在透镜中的折射率不同,这可能导致不同颜色的光聚焦在不同的位置,形成色差。
6、光学传递函数(OTF)下降:
球差会影响光学系统的传递函数,传递函数描述了系统对不同空间频率细节的传递能力。球差会导致传递函数下降,尤其是在高频区域。
7、深度场减小:
球差会影响成像系统的景深,即在保持清晰成像的物体距离范围内。球差较大的系统景深较小,这意味着只有很小的物体深度范围能够保持清晰。
8、光学系统性能降低:
在高精度的光学系统中,如显微镜、望远镜和高级相机镜头,球差的存在会显著降低系统的整体性能。
七、球差的校正
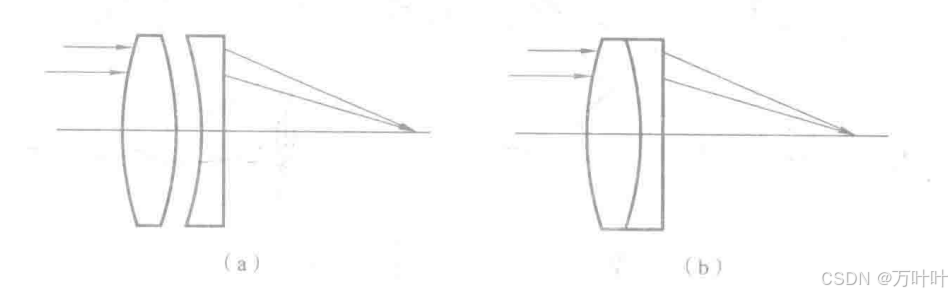
由垂轴球差公式可知:球差 𝛿𝐿′ 越大,像方孔径角U'越大,高斯像面上的弥散斑也越大,这将使像模糊不清。所以光学系统为使成像清晰,必须校正球差。对于大孔径系统,即使是较小的球差也会形成较大的弥散斑,因此校正球差的要求更为严格。球差对成像光学系统设计有着重要影响。由于绝大多数玻璃透镜元件都是球面的,因此球差的存在也是必然的。球差的存在使球面透镜的成像不再具有完美性,球面单透镜的球差是不可消除的。单正透镜会使光线偏向光轴,因此,边缘光线的偏向角比近轴光线的偏向角要大,即单正透镜产生负球差;同理,单负透镜产生正球差。因此,只有将正、负透镜组合起来才有可能使球差得到校正,组合光组称为消球差光组。最简单的消球差光组是图中的双分离透镜组或图中的双胶合透镜组。
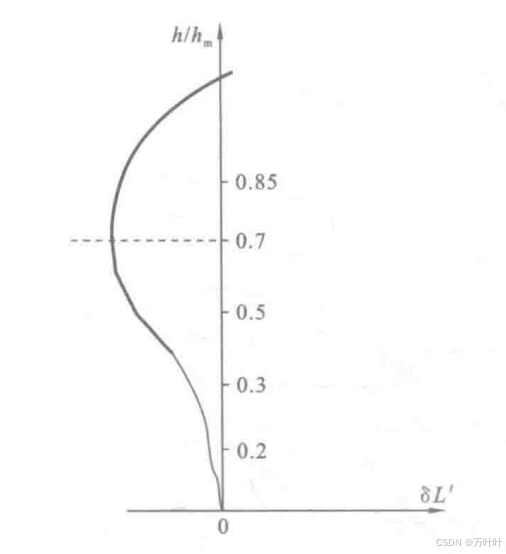
在光学系统中,将某一给定孔径的光线达到 𝛿𝐿′=0的系统称为消球差系统。值得注意的是:所谓的消球差一般只是能使某一孔径带的球差为0,而不能使各个孔径带全部为0,一般对边缘光孔径校正球差,即=0,而此时一般在0.707孔径有最大的剩余球差,大小约为边缘光高级球差的-1/4,如图所示。该图为一般消球差系统的球差曲线,横坐标为𝛿𝐿′,纵坐标为h/hmax,h是光线在孔径角为U时的人射高度,hmax是光线的最大入射高度。从图中可看到,孔径中央球差为0。
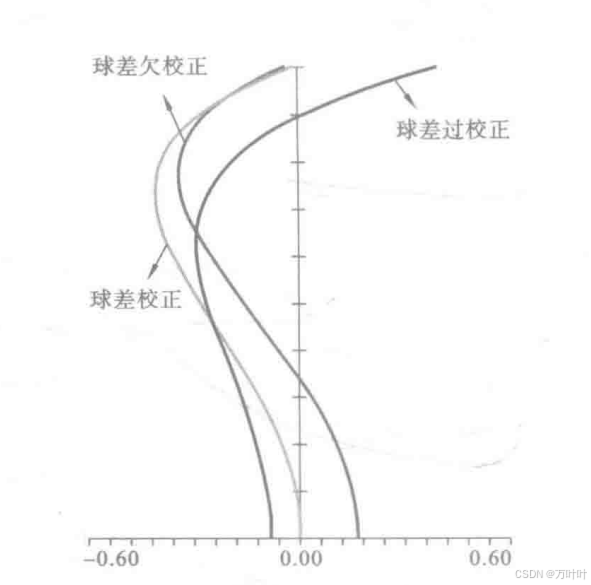
当边缘光孔径的球差不为0时,如果存在负球差𝛿𝐿′<0,称为球差校正不足或球差欠校正:如果存在正球差𝛿𝐿′>0,称为球差校正过头或球差过校正;若𝛿𝐿′=0,称为光学系统对这条光线校正了球差。球差校正曲线如下图所示。
单透镜的球差与焦距、相对孔径、透镜的形状及折射率有关。对于给定孔径、焦距和折射率的透镜,通过改变其形状可使球差达到最小。简而言之,球差取决于相对的透镜弯曲形式在物距和像距相等的对称情况下,两表面具有相同半径的双凸透镜是产生最小球差的弯曲形式。此外,经验表明,如果保持光焦度不变,则单透镜的球差将随折射率的增大而减小。控制球差的另一个有效方法是将光焦度分解成多个元件,通过在几个元件间分解光焦度,可以减小每个表面上的入射角,从而使像差减小。另外,在不能增加透镜的情况下,常使用二次曲面来消除球差,即常说的Conic非球面。
对单个折射球面而言,由公式 5 可知,当物点处于如下三个位置时,S1=0,可以不产生球差。
(1)、,即
。此时,物点和像点均位于球面的曲率中心,或者说
垂轴放大率
。
(2)、,此时,
,即物点和像点均位于球面顶点时,不产生球差。
(3)、,即
,此时物点位置及像点位置由下式描述
(公式6)
总结:由公式可见,这一对不产生球差的共轭点在球面的同一侧,且都在球心之外,故实物成虚像或虚物成实像。这一对共轭点通常称为不晕点或齐明点。在光学设计中,常利用齐明点的特性来制作齐明透镜,以增大物镜的孔径角,用于显微物镜或照明系统中。
可以参考我的另一篇文章:齐明点与齐明透镜及其应用_齐明透镜设计-CSDN博客
八、消球差
如何在zemax光学设计控制和消球差,可以参考我的另一篇文章:
球差控制操作数【ZEMAX操作数】-CSDN博客
由于本片内容过多,之后会单独写一篇在zemax中如何去描述球差、判断球差,怎么对球差进行定量分析;
--参考资料
1、球差【百度百科】
2、ZEMAX光学系统设计实训教程

本篇文章为个人学习笔记,仅供学习和复习使用,不涉及商业目的。未经允许不得转载或用于商业用途。

















 1392
1392

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









