






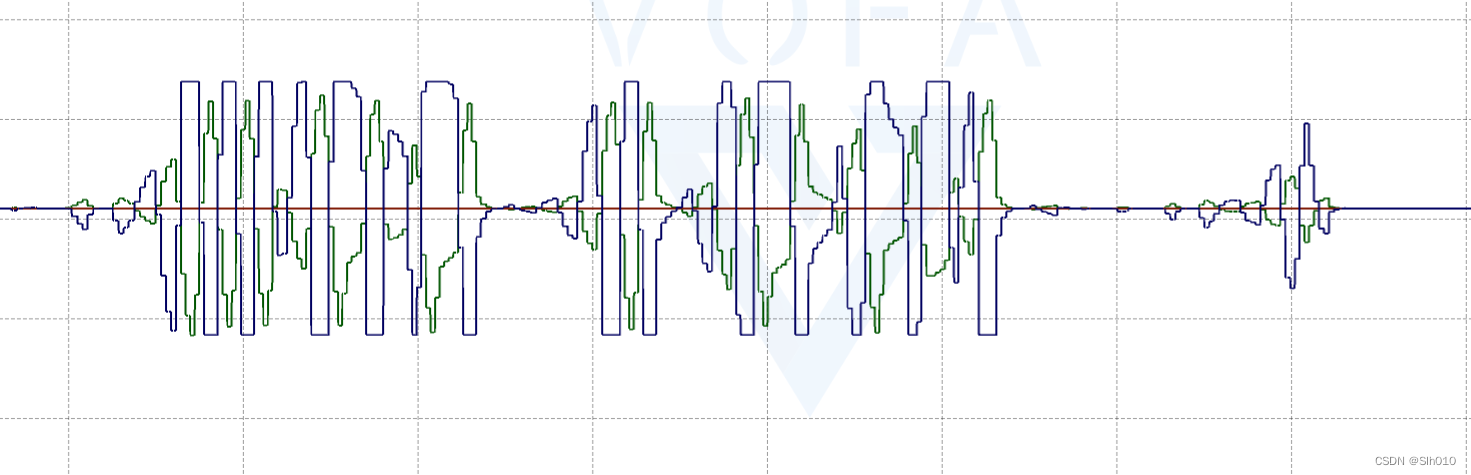
速度环 速度为0时 轻微干扰电机疯狂振动,怎么调P值都没有用
修改之前电机速度采样率为5ms pwm输出率为20ms
导致pid计算的pwm值为前几毫秒的值 有延迟 造成震荡
蓝线:输出pid计算后的pwm值
红线:速度目标值
绿线:当前速度
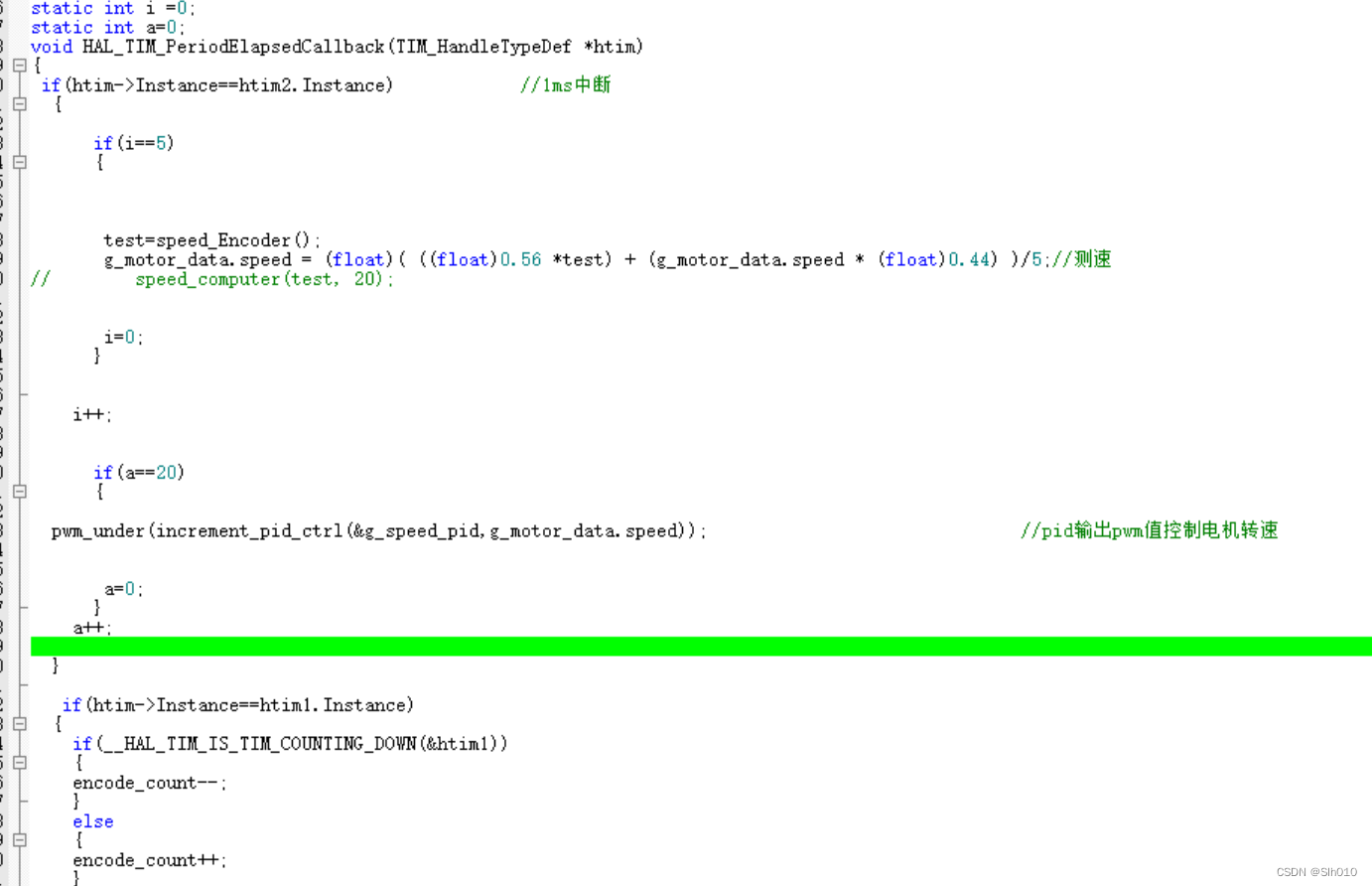
修改
删去设置的延时 都改在1ms定时器中断中
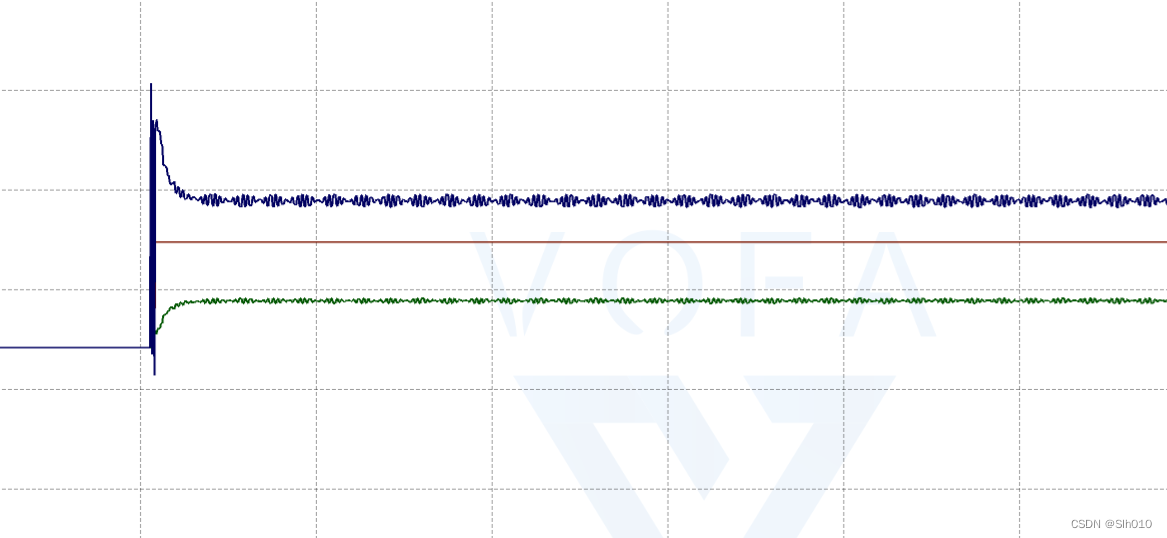
波形正常
之后调参就行了
速度环 速度为0时 轻微干扰电机疯狂振动,怎么调P值都没有用
修改之前电机速度采样率为5ms pwm输出率为20ms
导致pid计算的pwm值为前几毫秒的值 有延迟 造成震荡
蓝线:输出pid计算后的pwm值
红线:速度目标值
绿线:当前速度
修改
删去设置的延时 都改在1ms定时器中断中
波形正常
之后调参就行了
 4351
4812
1583
4351
4812
1583











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























