






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
基于遗传算法混合粒子群算法的无人机路径规划研究及其与遗传算法、粒子群算法的比较分析
💥1 概述
基于遗传算法混合粒子群算法的无人机路径规划研究及其与遗传算法、粒子群算法的比较分析
一、遗传算法(GA)与粒子群算法(PSO)的基本原理与特点
- 遗传算法(GA)
- 基本原理:模拟生物进化过程,包括种群初始化、适应度评估、选择、交叉、变异等步骤。通过保留适应度高的个体并引入随机变异,逐步逼近全局最优解。
- 核心操作:
- 交叉:通过交换染色体片段生成新个体,增强种群多样性。
- 变异:随机改变基因编码,避免早熟收敛。
- 特点:
- 优点:全局搜索能力强,适合复杂多峰优化问题。
- 缺点:收敛速度慢,局部搜索能力弱,计算复杂度高。
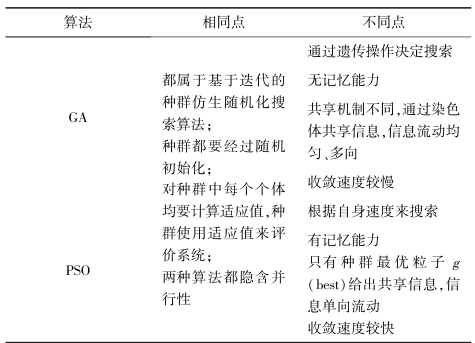
2. 粒子群算法(PSO)
-
基本原理:模拟鸟群觅食行为,通过个体与群体的历史最优位置调整粒子速度和方向。
-
核心公式:

-
特点:
-
优点:收敛速度快,参数少,实时性强。
-
缺点:易陷入局部最优,缺乏全局搜索能力。
二、混合遗传-粒子群算法的设计思路
混合算法旨在结合GA的全局搜索与PSO的局部搜索优势,常见设计包括:
- 串行混合:前期用GA进行广泛搜索,后期用PSO精细调整。
- 嵌入式混合:在PSO中嵌入GA的交叉和变异操作,增加种群多样性。
- 分层结构:底层用GA子群进行全局搜索,上层用PSO精英群进行局部优化。
实现案例:
- GA-APSO算法:在自适应混沌PSO中引入GA的交叉和变异,显著提升全局收敛性。
- HGA-PSO算法:多子群分层结构,底层GA子群提供多样性,上层PSO精英群加速收敛。
三、无人机路径规划中的性能对比
-
收敛速度
- PSO:由于信息单向流动和记忆机制,收敛速度最快。
- GA:交叉和变异操作导致冗余迭代,收敛速度较慢。
- 混合算法:结合PSO的快速收敛和GA的多样性,速度介于两者之间,但稳定性更高。
实验数据:在无人机编队会合任务中,PSO平均迭代次数比GA减少30%,混合算法进一步缩短10%。
-
优化程度
- PSO:局部搜索能力强,但在复杂地形中易漏掉全局最优解。
- GA:全局搜索能力突出,但路径平滑性较差。
- 混合算法:综合优势明显。例如,在三维路径规划中,混合算法生成的路径总威胁指数较PSO降低15%,路径长度较GA减少10%。
-
计算复杂度
- GA:复杂度为 O(N⋅G⋅D)O(N⋅G⋅D)(NN为种群规模,GG为迭代次数,DD为解维度),适合离线规划。
- PSO:复杂度 O(N⋅T)O(N⋅T)(TT为迭代次数),实时性更强。
- 混合算法:复杂度略高于单一算法,但通过分层或并行设计可优化。例如,HGA-PSO在无人机多区域覆盖任务中,计算时间比纯GA减少40%。
- GA:复杂度为 O(N⋅G⋅D)O(N⋅G⋅D)(NN为种群规模,GG为迭代次数,DD为解维度),适合离线规划。
四、典型应用案例对比
| 算法类型 | 应用场景 | 优势与局限 | 案例来源 |
|---|---|---|---|
| GA | 静态障碍物环境下的全局路径规划 | 路径多样性高,但实时性差 | 栅格地图路径规划 |
| PSO | 动态威胁环境下的实时路径调整 | 响应速度快,但路径易陷入局部最优 | 动态雷达威胁规避 |
| GA-PSO混合算法 | 复杂三维环境下的多无人机协同任务 | 兼顾全局最优与实时性,计算资源需求高 | 多无人机编队会合 |
五、总结与展望
-
总结:
- GA更适合静态环境下的全局路径探索,PSO在动态环境中表现更优,而混合算法通过优势互补,在复杂任务中综合性能最佳。
- 混合算法的核心挑战在于平衡计算效率与优化精度,需根据任务需求选择分层、嵌入式或并行策略。
-
未来方向:
- 多算法融合:结合蚁群算法、深度学习等进一步提升适应性。
- 硬件加速:利用FPGA或GPU实现混合算法的并行计算。
- 动态参数调整:设计自适应惯性权重和变异概率。
通过上述分析可见,混合遗传-粒子群算法在无人机路径规划中展现出更强的鲁棒性和适应性,为复杂环境下的任务执行提供了新的解决方案。
📚2 运行结果




部分代码:
%种群的适应度值
seeds_fitness=zeros(1,model.NP);
%全局最优
p_global.cost=inf;
%适应度最优值保留
best=zeros(model.MaxIt+1,1);
best(1)=model.globel.cost;
%种群初始化
for i=1:model.NP
chromosome(i).pos=model.chromosome(i).pos;
chromosome(i).alpha=model.chromosome(i).alpha;
chromosome(i).beta=model.chromosome(i).beta;
chromosome(i).atkalpha=model.chromosome(i).atkalpha;
chromosome(i).atkbeta=model.chromosome(i).atkbeta;
chromosome(i).T=model.chromosome(i).T;
chromosome(i).sol=model.chromosome(i).sol;
chromosome(i).cost=model.chromosome(i).cost;
chromosome(i).IsFeasible=model.chromosome(i).IsFeasible;
seeds_fitness(i)=model.seeds_fitness(i);
for d=1:3
chromosome(i).vel(d,:)= zeros(1,model.dim);
end
%更新历史最优粒子
chromosome(i).best.pos =chromosome(i).pos;
chromosome(i).best.alpha =chromosome(i).alpha;
chromosome(i).best.beta =chromosome(i).beta;
chromosome(i).best.T =chromosome(i).T;
chromosome(i).best.sol =chromosome(i).sol;
chromosome(i).best.cost =chromosome(i).cost;
%更新全局最优例子
if p_global.cost > chromosome(i).best.cost
p_global = chromosome(i).best;
end
end
for it=1:model.MaxIt
%得到最大和平均适应度值
model.f_max =max(seeds_fitness);
model.f_avg =mean(seeds_fitness);
%按照适应度对染色体排序
sort_array =zeros(model.NP,2);
for i=1:model.NP
sort_array(i,:)= [i,chromosome(i).cost];
end
%以cost从小到大进行排序
sort_array =sortrows(sort_array,2);
model.p_global =p_global;
%只保留前一半的染色体,后一般抛弃
for i=1:model.NP/2
next_chromosome(i) =chromosome(sort_array(i,1));
%更新染色体的速度和位置
[next_chromosome(i).vel,next_chromosome(i).alpha,next_chromosome(i).beta,next_chromosome(i).T]=Update_vel_pos( next_chromosome(i),model );
[next_chromosome(i).pos]=Angel2Pos( next_chromosome(i),model );
%检验坐标是否合理
[flag(i),next_chromosome(i).atkalpha,next_chromosome(i).atkbeta] = IsReasonble(next_chromosome(i),model);
%计算适应度值
[next_chromosome(i).cost,next_chromosome(i).sol] = FitnessFunction(next_chromosome(i),model);
end
%对剩余的NP/2个染色体进行选择交叉变异操作
for i=model.NP/2+1:2:model.NP
%随机选择父母
parents =repmat(my_chromosome,2,1);
for p=1:2
array =ceil(rand(1,2)*model.NP/2);
if next_chromosome(array(1)).cost < next_chromosome(array(2)).cost
parents(p) = next_chromosome(array(1));
else
parents(p) = next_chromosome(array(2));
end
end
%交叉变异操作
[ sons] = CrossoverAndMutation( parents,model );
%符合要求以后计算子代的适应度值
[sons(1).cost,sons(1).sol] = FitnessFunction(sons(1),model);
[sons(2).cost,sons(2).sol] = FitnessFunction(sons(2),model);
next_chromosome(i) = sons(1);
next_chromosome(i+1) =sons(2);
end
for i=1:model.NP
chromosome(i) =next_chromosome(i);
%更新局部最优
if chromosome(i).cost < chromosome(i).best.cost
chromosome(i).best.pos =chromosome(i).pos;
chromosome(i).best.alpha =chromosome(i).alpha;
chromosome(i).best.beta =chromosome(i).beta;
chromosome(i).best.T =chromosome(i).T;
chromosome(i).best.sol =chromosome(i).sol;
chromosome(i).best.cost =chromosome(i).cost;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]鞠宏浩,程楷钧,邓彩连,等.无人机空地网络研究综述[J/OL].西南交通大学学报:1-14[2024-04-16].http://kns.cnki.net/kcms/detail/51.1277.U.20240415.1013.004.html.
[2]薛斌,张志才,付芳.无人机辅助智能交通系统中面向视频多播的资源优化[J].测试技术学报,2024,38(02):194-202.
[3]李鹏娜.无人机路径规划方法研究及在油田巡井中的应用[D].东北石油大学[2024-04-17].DOI:CNKI:CDMD:2.1017.085318.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









