






一、中断原理
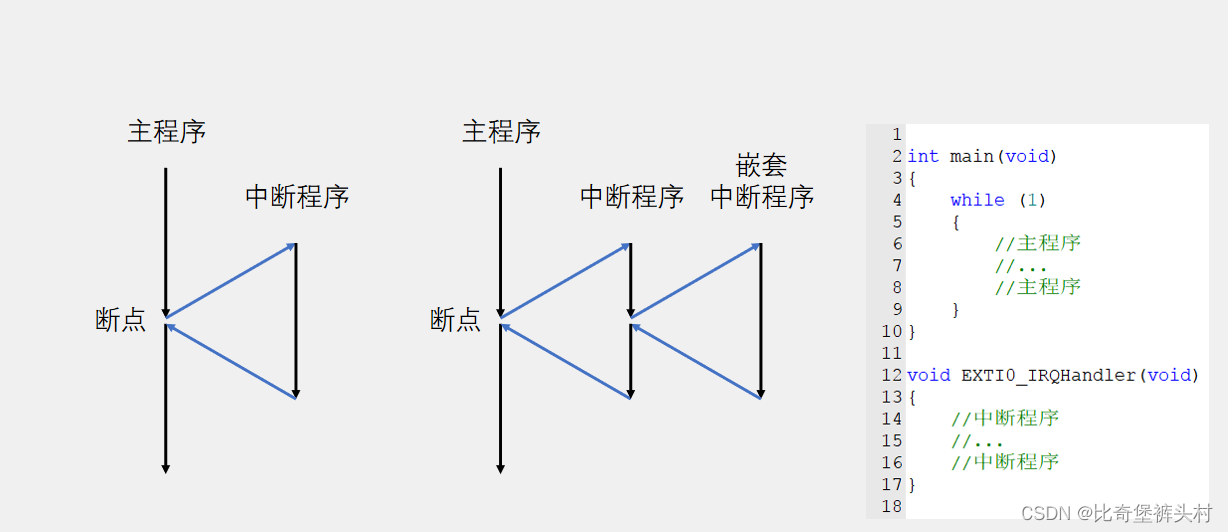
中断:在主程序运行过程中,出现了特定的中断触发条件(中断源),使得CPU暂停当前正在运行的程序,转而去处理中断程序,处理完成后又返回原来被暂停的位置继续运行
中断优先级:当有多个中断源同时申请中断时,CPU会根据中断源的轻重缓急进行裁决,优先响应更加紧急的中断源
中断嵌套:当一个中断程序正在运行时,又有新的更高优先级的中断源申请中断,CPU再次暂停当前中断程序,转而去处理新的中断程序,处理完成后依次进行返回
中断执行流程:
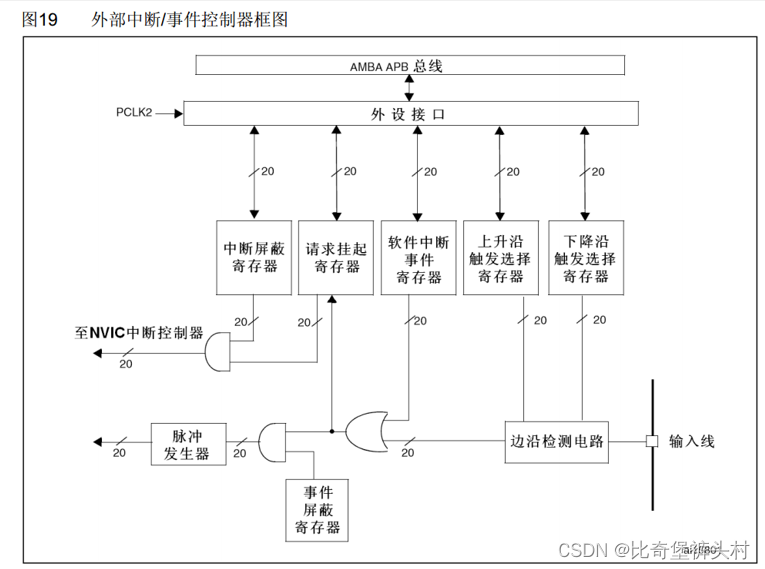
AFIO复用IO口:

二、中断控制LED灯
1.实验要求
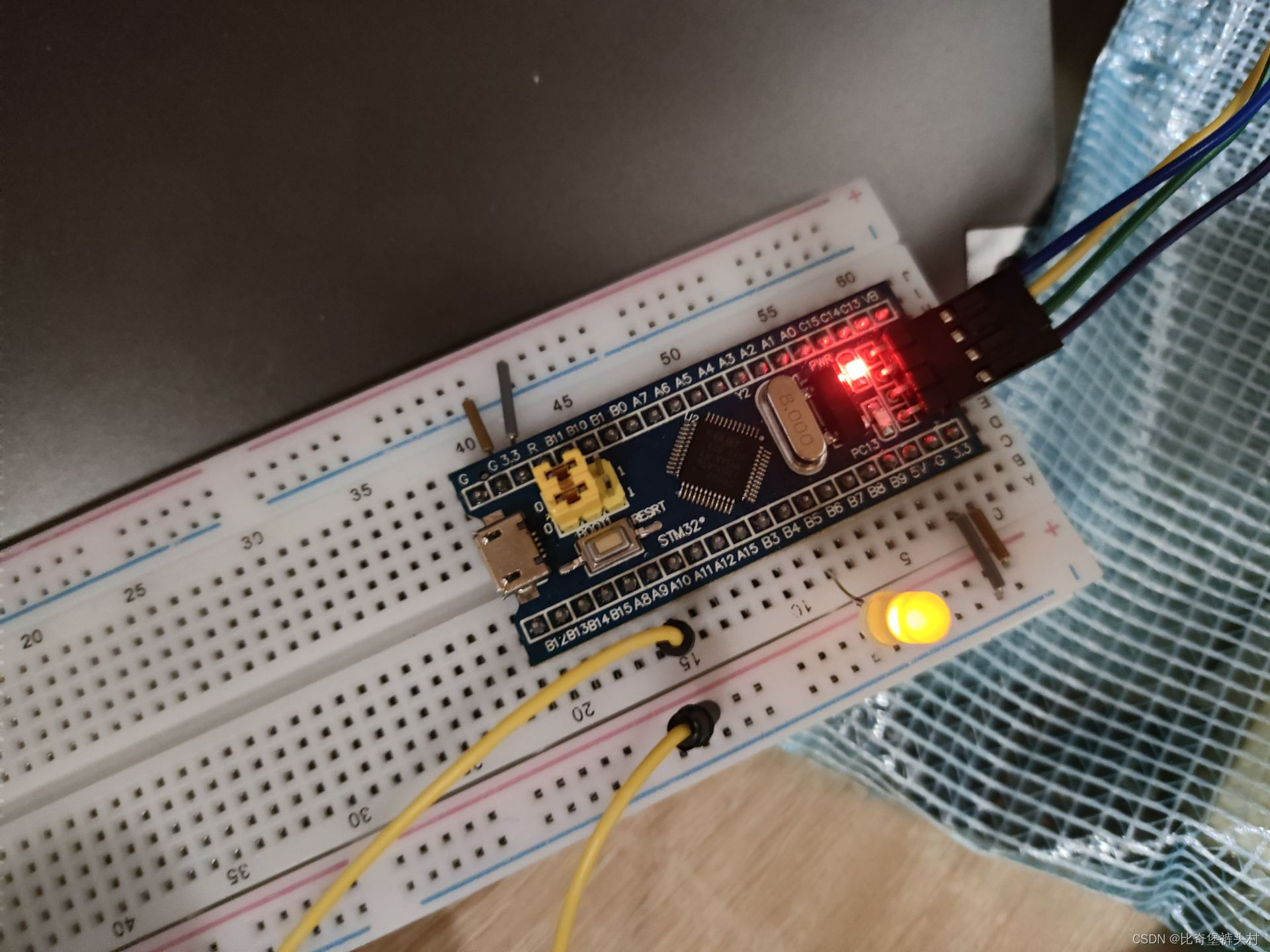
用stm32F103核心板的GPIOA端一管脚接一个LED,GPIOB端口一引脚接一个开关(用杜邦线模拟代替)。采用中断模式编程,当开关接高电平时,LED亮灯;接低电平时,LED灭灯。
2.代码部分
exit_key.c
#include "exit_key.h"
#include "misc.h"
void EXTI_Key_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_ClearITPendingBit(EXTI_Line9);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource9); // 对应PA9引脚
EXTI_InitStructure.EXTI_Line = EXTI_Line9;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
}
exit_key.h
#ifndef __EXTI_KEY_H
#define __EXTI_KEY_H
#include "stm32f10x.h"
void EXTI_Key_Init(void);
#endif
main.c
#include "stm32f10x.h"
#include "led.h"
#include "exit_key.h"
int main(void)
{
LED_Init();
GPIO_ResetBits(GPIOB, GPIO_Pin_5);
EXTI_Key_Init(); //初始化函数
while(1)
{
}
}
void EXTI9_5_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line9) != RESET)
{
GPIO_WriteBit(GPIOB, GPIO_Pin_5, (BitAction)((1 - GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_5))));
EXTI_ClearITPendingBit(EXTI_Line9);
}
}
3.效果展示
三、中断通信实验
1.实验要求
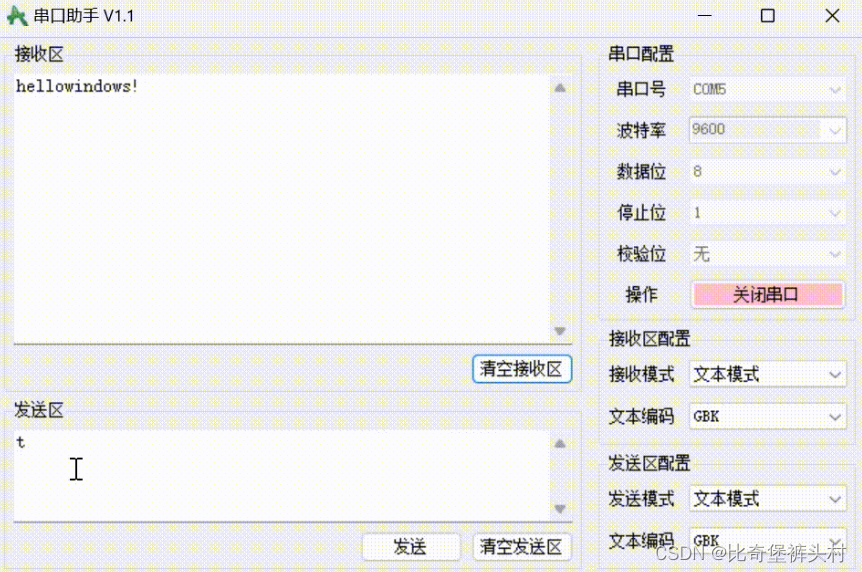
(1)当stm32接收到1个字符“s”时,停止持续发送“hello windows!”; 当接收到1个字符“t”时,持续发送“hello windows!”(提示:采用一个全局标量做信号灯);
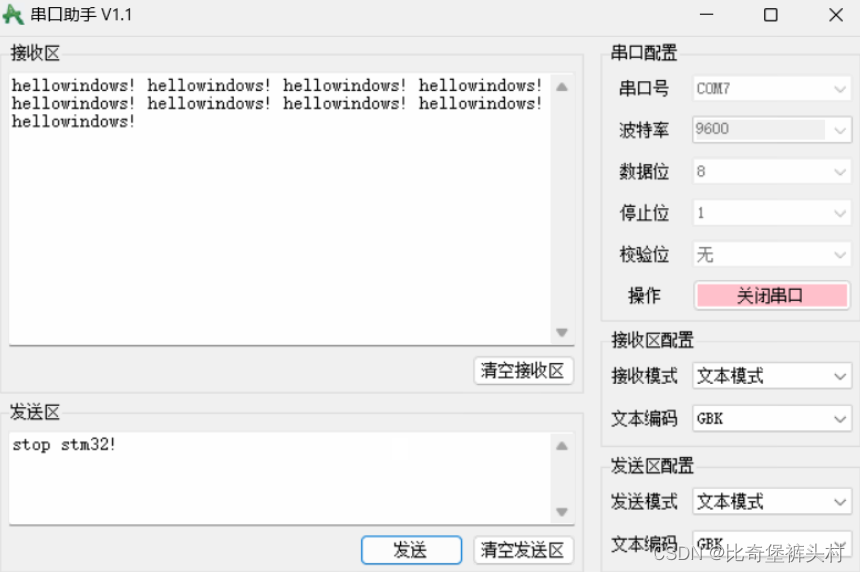
(2)当stm32接收到字符“stop stm32!”时,停止持续发送“hello windows!”; 当接收到字符“go stm32!”时,持续发送“hello windows!”(提示:要将接收到的连续字符保存到一个字符数组里,进行判别匹配。写一个接收字符串的函数。
2.代码实现及效果实现
main.c
#include "stm32f10x.h"
#include "Delay.h"
int send=0;//设置标志位
void hellowindows()
{
if(send==1)
{
int i;
char a [14]={'h','e','l','l','o','w','i','n','d','o','w','s','!',' '};
for (i = 0; i < 14; i++)
{
USART_SendData(USART1,a[i]);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
Delay_s(1);
}
}
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
uint8_t receivedChar = USART_ReceiveData(USART1);
if (receivedChar == 's')
{
send = 0;
}
else if (receivedChar == 't')
{
send = 1;
}
}
}
int main(void)
{
USART_InitTypeDef USART_InitStructure;
// 1,打开时钟---GPIOA(串口1),AFIO
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA,ENABLE);
// 2,GPIO初始化
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA,&GPIO_InitStructure);
// 3,串口初始化
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength= USART_WordLength_8b;
USART_InitStructure.USART_StopBits= USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_Init(USART1, &USART_InitStructure);
USART_ClearFlag(USART1, USART_FLAG_TC);
// 配置中断源
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//当USART串口接收到数据的时候,就触发USART中断
// 4.给这个中断源配置相应的抢占优先级和执行优先级
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; //设置抢占(主)优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; // 设置子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
// 5,使能串口
USART_Cmd(USART1, ENABLE);
while(1)
{
hellowindows();
}
}
效果:
#include "stm32f10x.h"
#include "Delay.h"
int send=0;//全局变量,记录状态
int count=0;//全局变量,表示缓冲区的数组的下标
char receive_data[11];//接收缓存区
void receive_data_init()//接收缓存区初始化
{
count=0;
for(int i=0;i<11;i++)
{
receive_data[i]=0;
}
}
void hellowindows()
{
if(send==1)//当send为1,输出hellowindows!
{
int i;
char a [14]={'h','e','l','l','o','w','i','n','d','o','w','s','!',' '};
for (i = 0; i < 14; i++)
{
USART_SendData(USART1,a[i]);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
Delay_s(1);//延时1s
}
}
void USART1_IRQHandler(void)//中断函数,接收数据存入接收缓冲区
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)//判断中断是接收数据中断
{
receive_data[count]= USART_ReceiveData(USART1); //接收字符
count++;
}
}
int main(void)
{
USART_InitTypeDef USART_InitStructure;
// 1,打开时钟---GPIOA(串口1),AFIO
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA,ENABLE);
// 2,GPIO初始化
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA,&GPIO_InitStructure);
// 3,串口初始化
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength= USART_WordLength_8b;
USART_InitStructure.USART_StopBits= USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_Init(USART1, &USART_InitStructure);
USART_ClearFlag(USART1, USART_FLAG_TC);
// 配置中断源
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//当USART串口接收到数据的时候,就触发USART中断
// 4.给这个中断源配置相应的抢占优先级和执行优先级
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; //设置抢占(主)优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; // 设置子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
// 5,使能串口
USART_Cmd(USART1, ENABLE);
//-----------------------------------------------(同上)---------------------------------------------------
receive_data_init();//初始化接收缓存区
while(1)
{
hellowindows();
if ( strcmp(receive_data,"stop stm32!")==0)
{
send = 0;//结束发送
receive_data_init();
}
else if (strcmp(receive_data,"go stm32!")==0)
{
send = 1;//发送数据
receive_data_init();//重新初始化接收缓存区,以便下次接收数据
}
}
}
效果实现:
总结
本次实验了解了STM32中断编程的基础,使用中断来进行点灯操作,进一步来通过串口通信来完成相应数据的传输。















 366
366











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









