







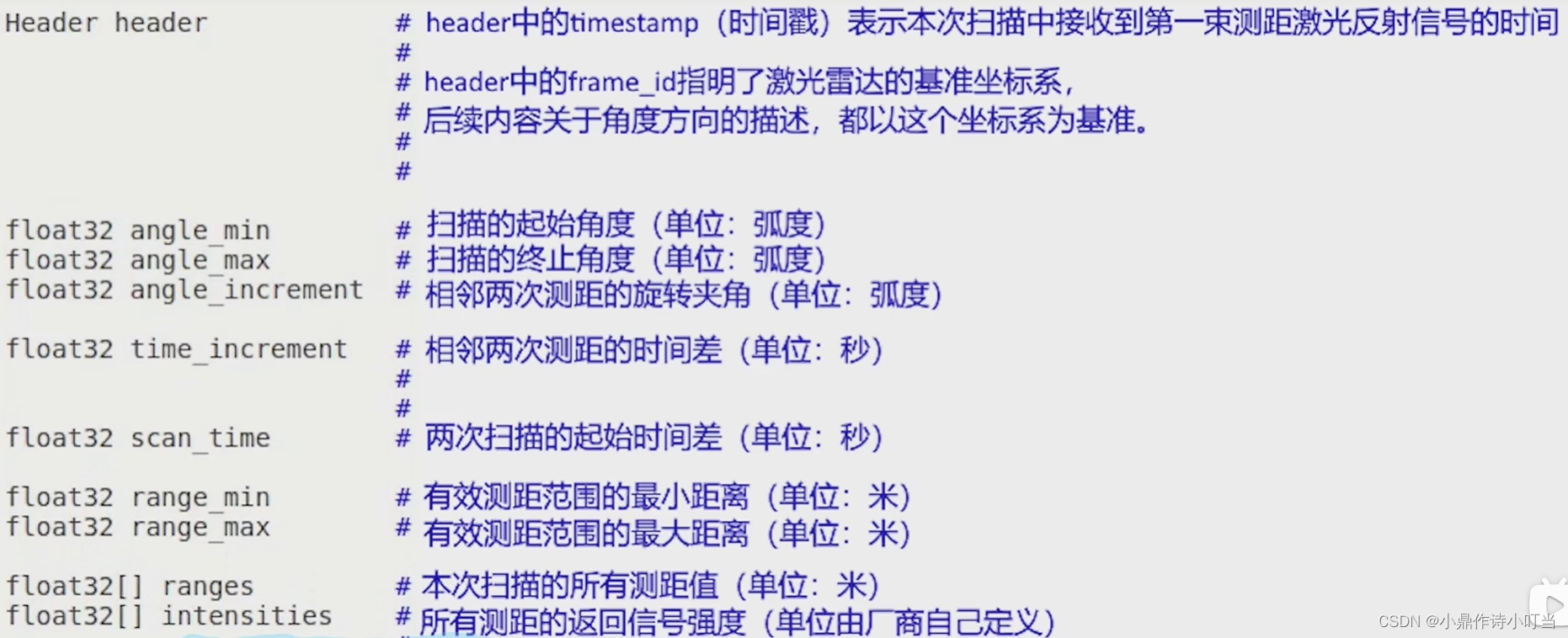
23.激光雷达消息包格式
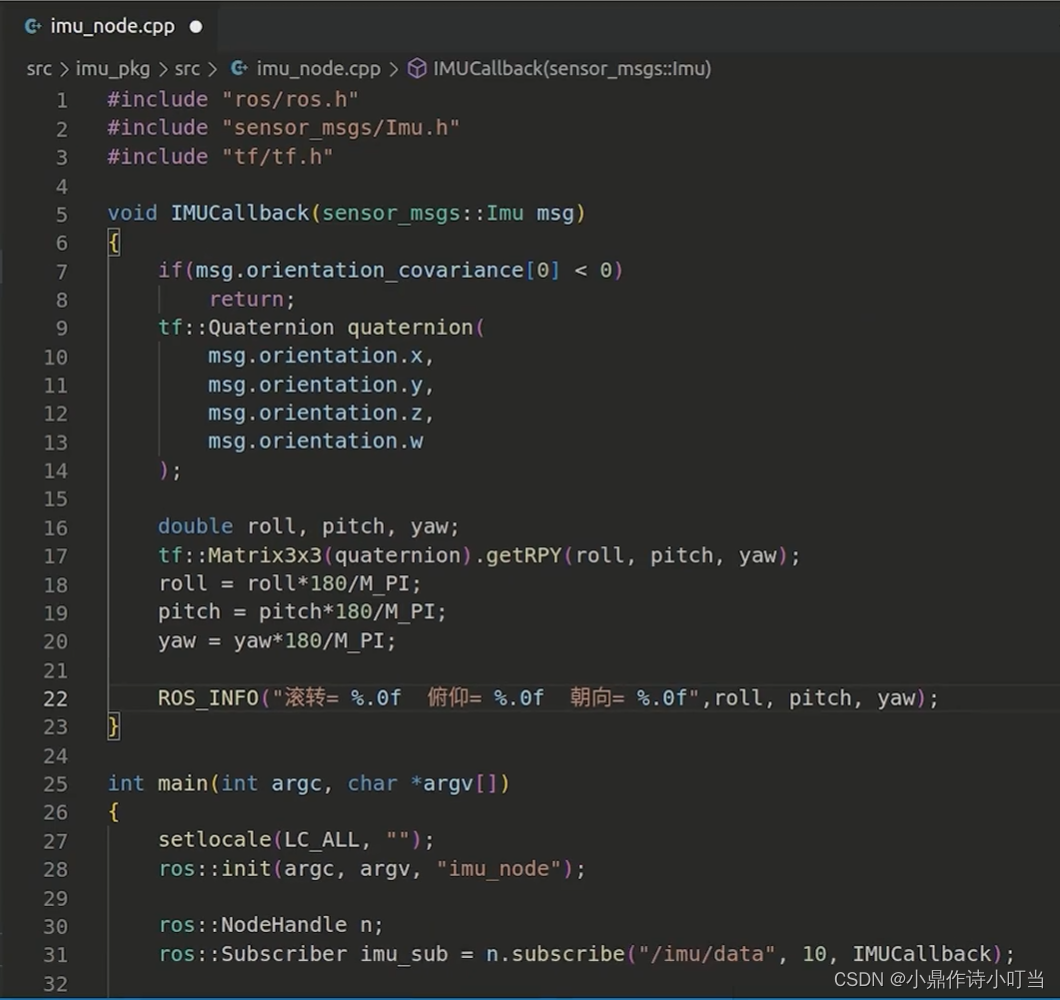
29.获取lMU数据的C++节点
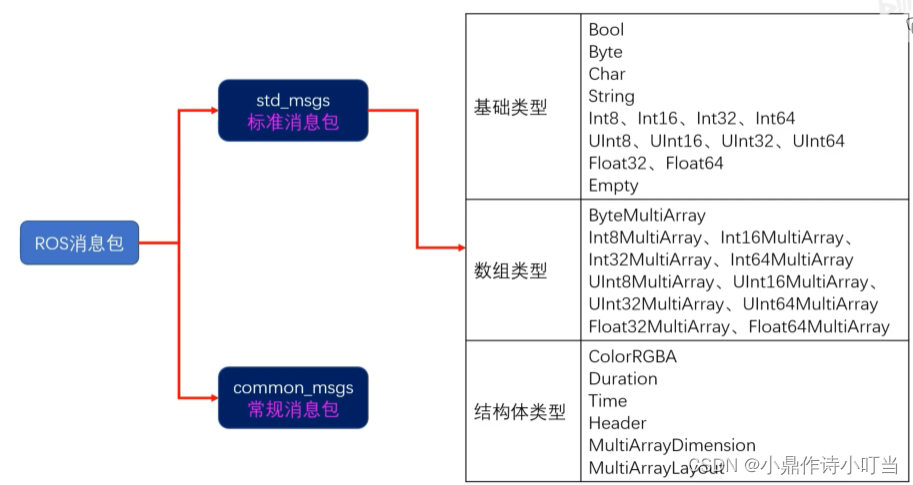
33.ROS 的标准消息包 std_msgs
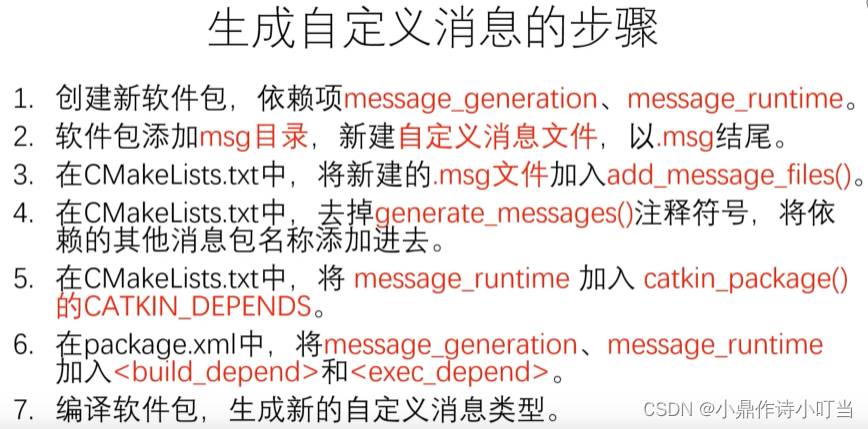
35.自定义消息类型
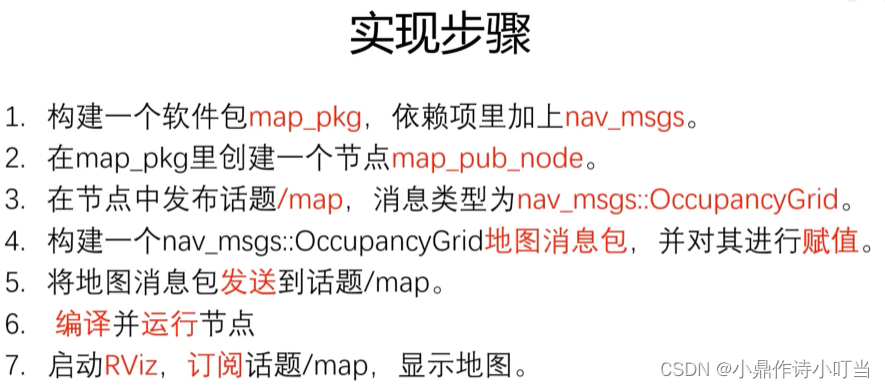
39.C++节点发布地图
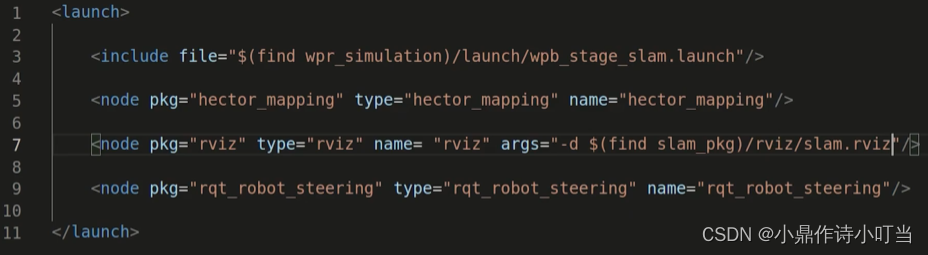
43.通过launch文件启动Hector_Mapping的建图功能
44.Hector_Mapping建图的参数设置

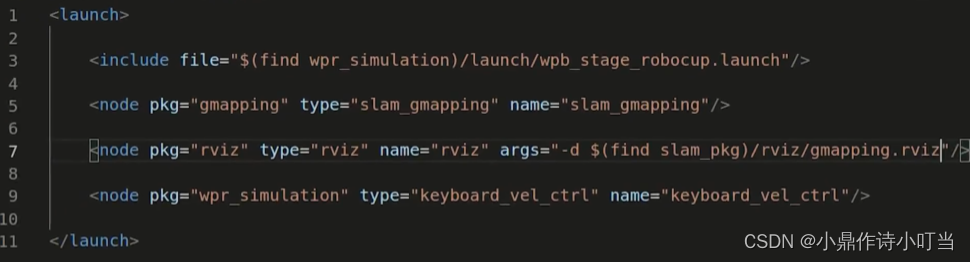
48.编写launch文件,一键启动Gmapping建图
23.激光雷达消息包格式
29.获取lMU数据的C++节点
33.ROS 的标准消息包 std_msgs
35.自定义消息类型
39.C++节点发布地图
43.通过launch文件启动Hector_Mapping的建图功能
44.Hector_Mapping建图的参数设置
48.编写launch文件,一键启动Gmapping建图
 785
1791
1066
785
1791
1066











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























