







7.git clone wpr_simulation


8.Visual Studio Code 的安装和设置
![]()
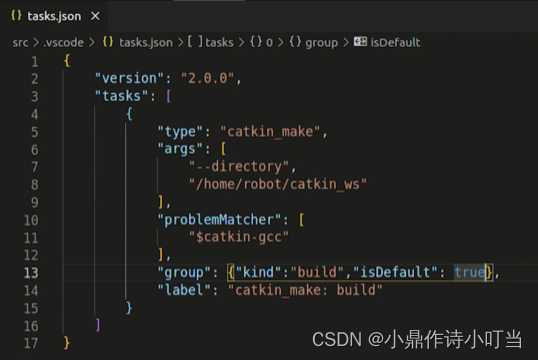
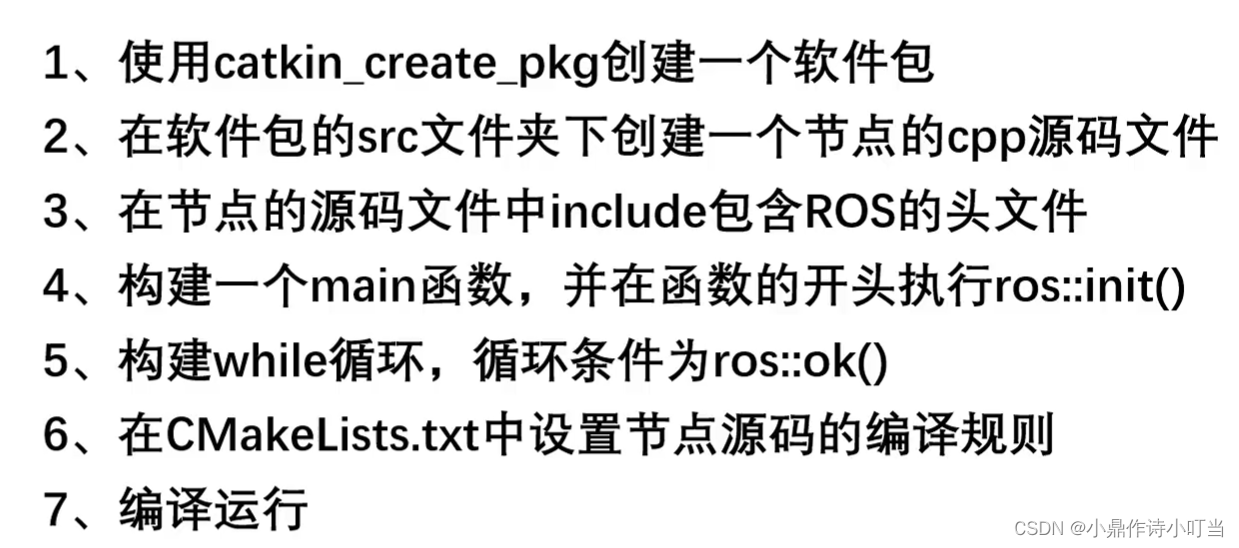
11.年轻人的第一个Node节点
vscode编译快捷键 ctrl+shift+b
打开超级终端Terminator快捷键ctrl+alt+t
下面分出新终端ctrl+shift+o
右边分出新终端ctrl+shift+e
删除分出新终端ctrl+shift+w

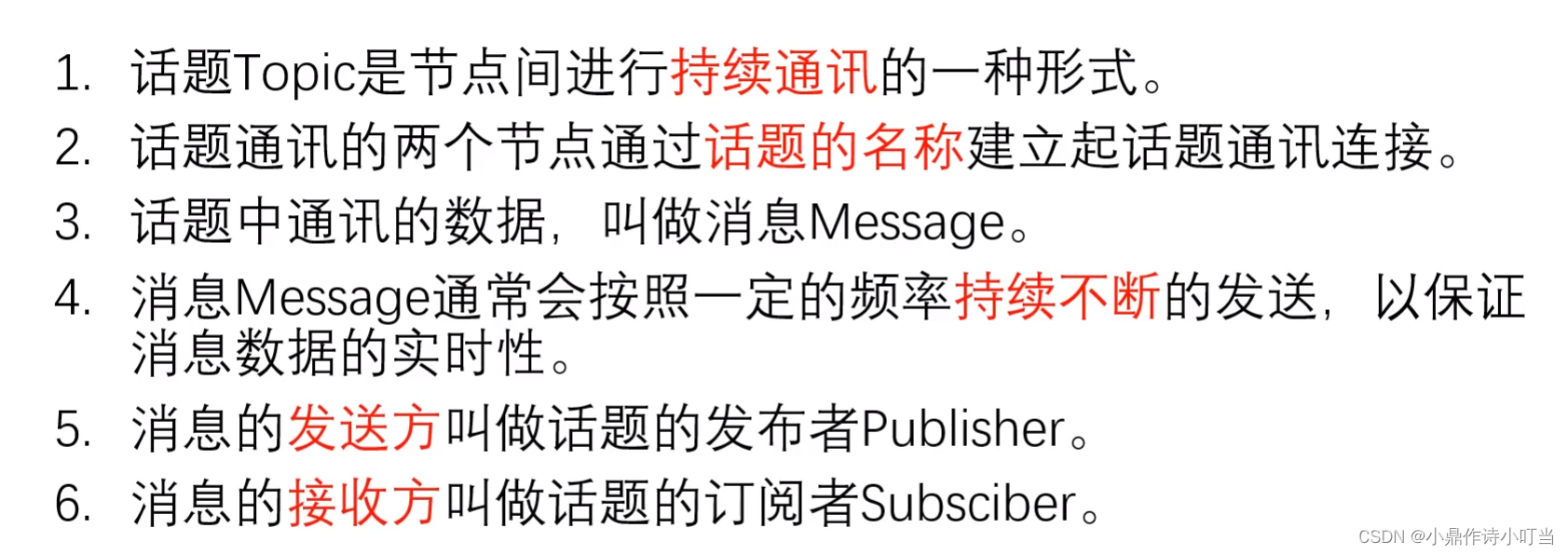
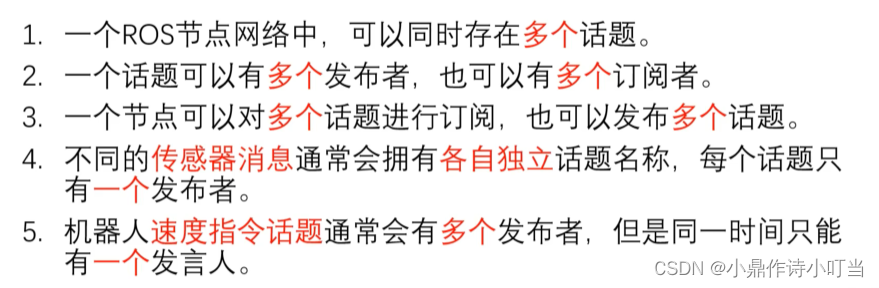
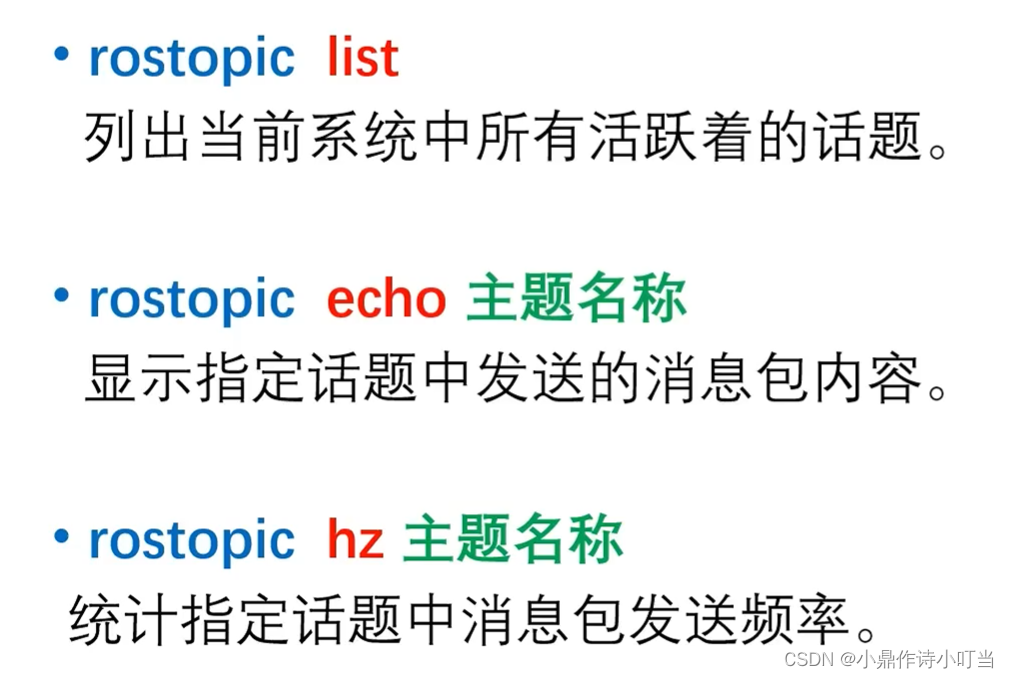
12.Topic话题与Message消息
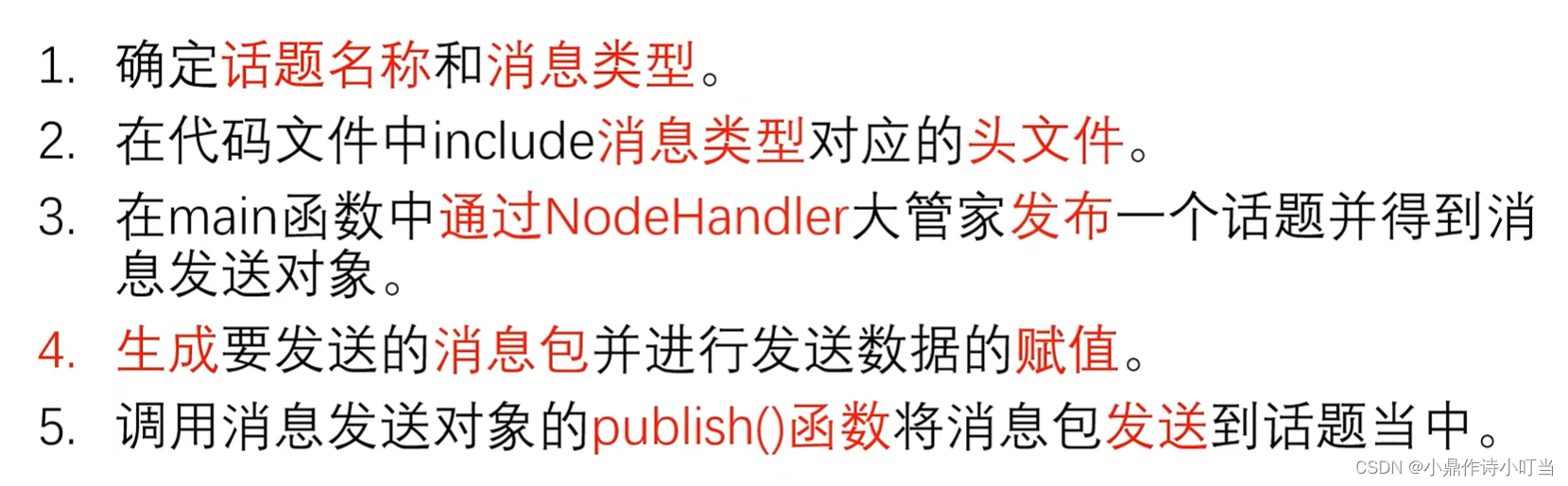
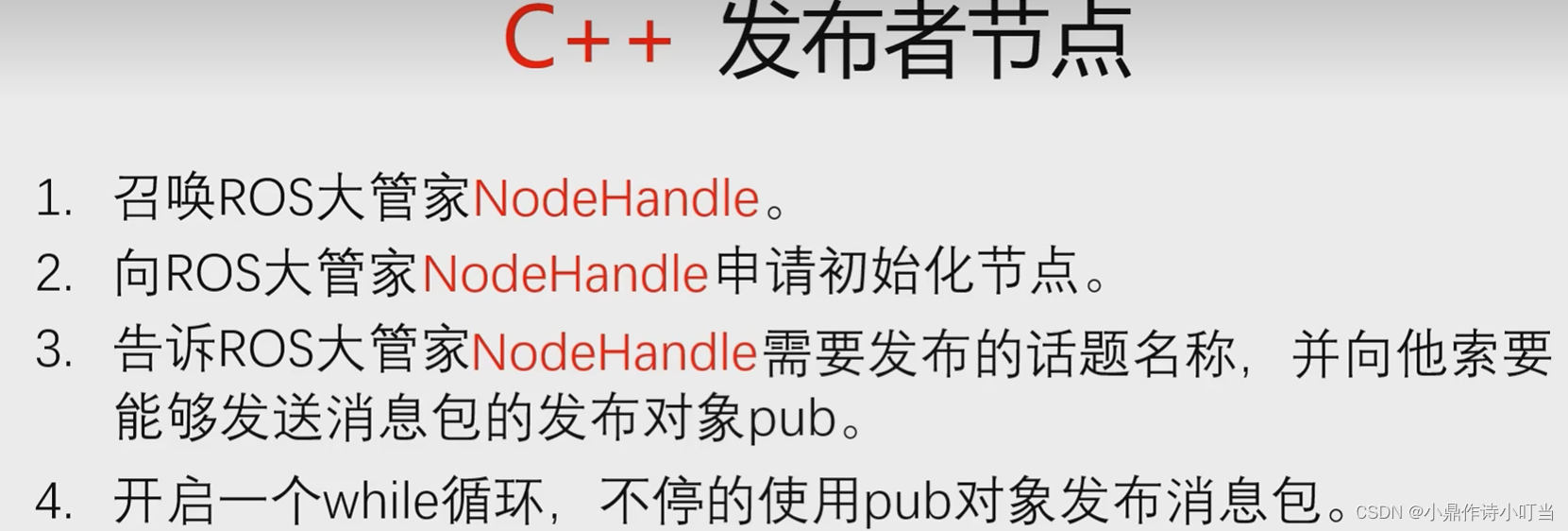
13.Publisher发布者的C++实现
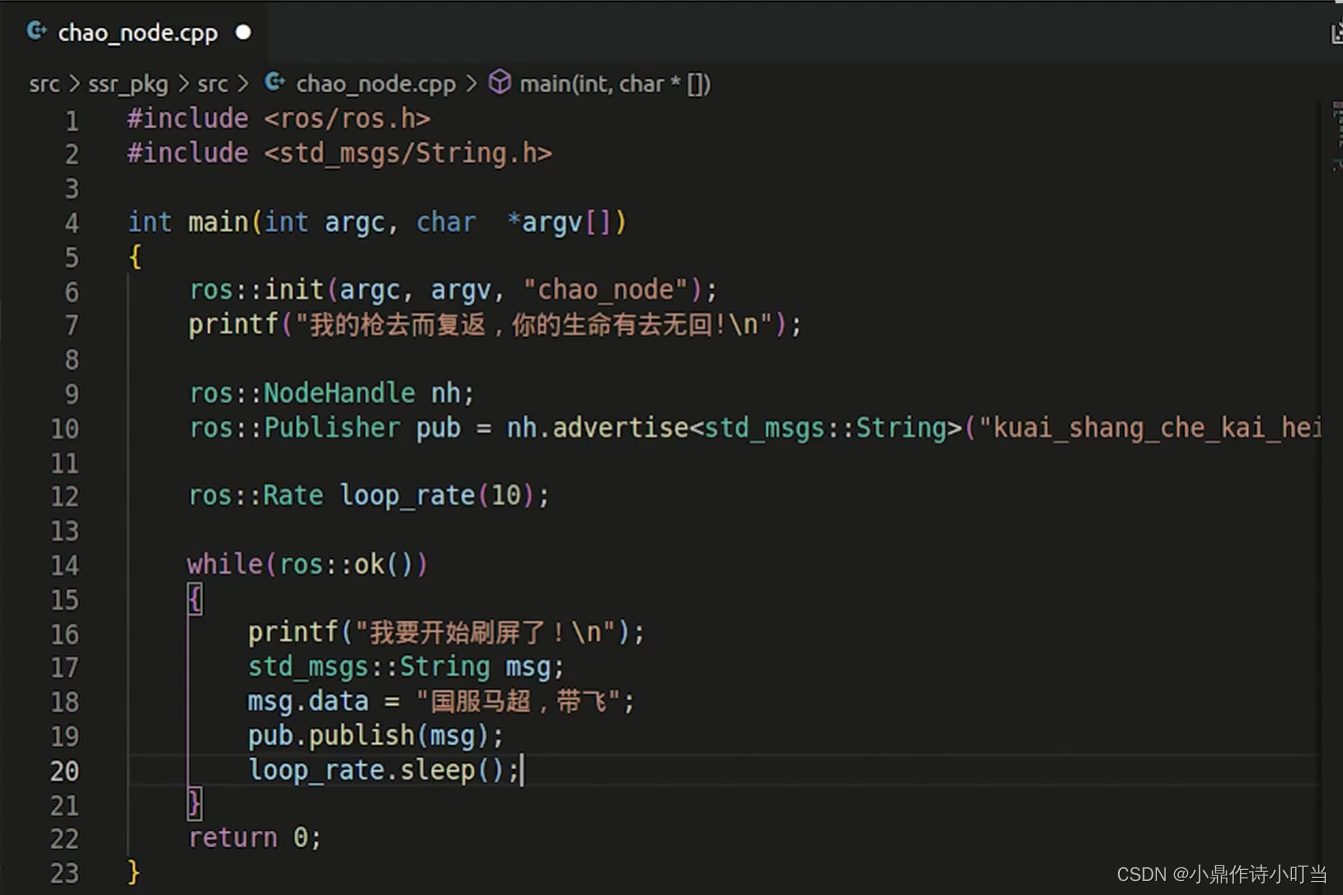
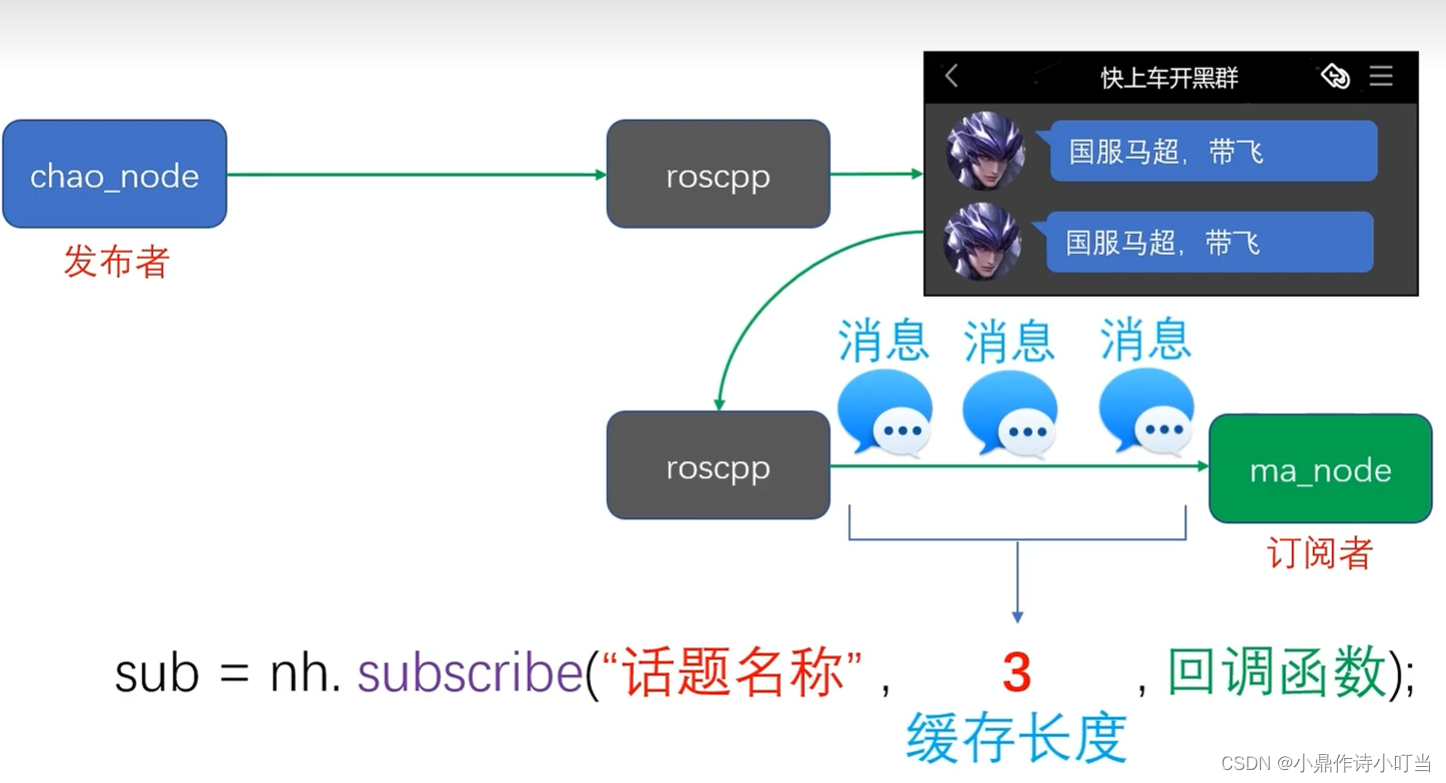
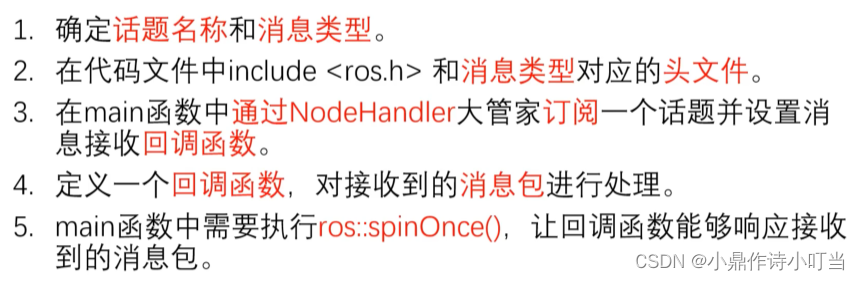
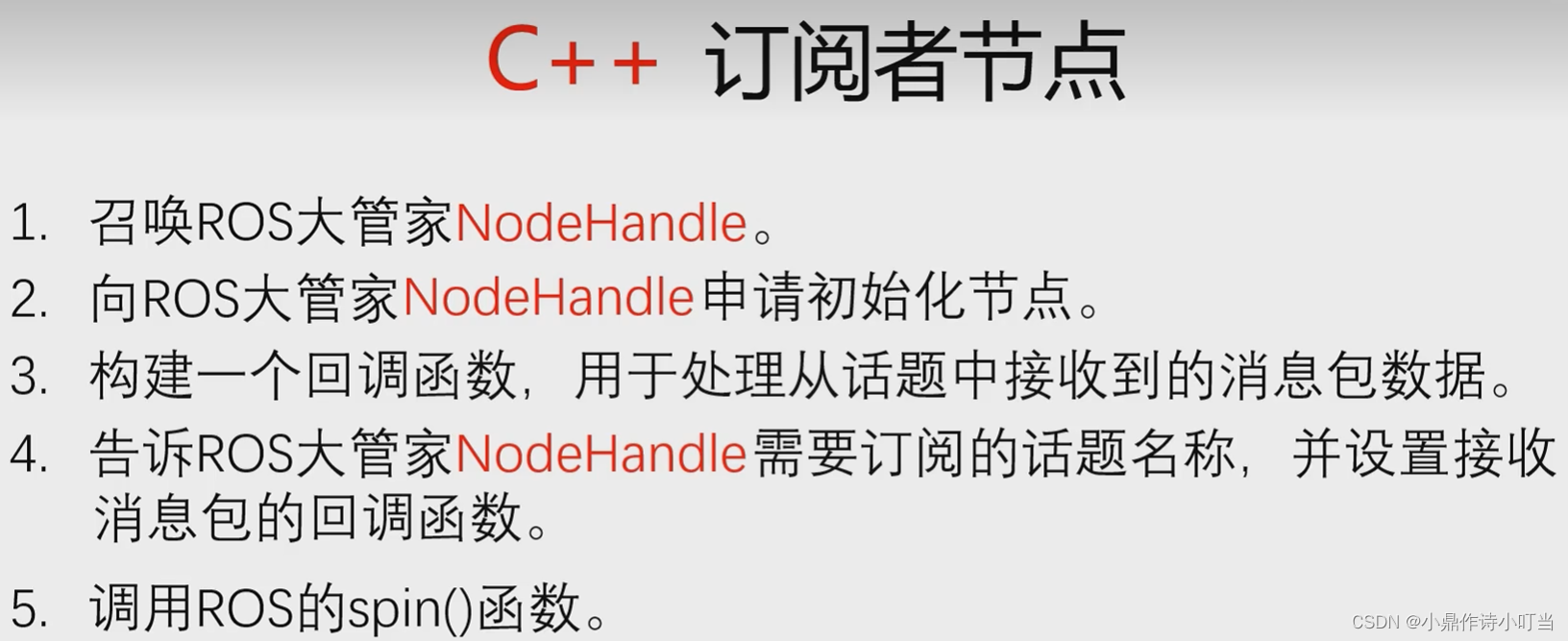
14.Subscriber订阅者的C++实现
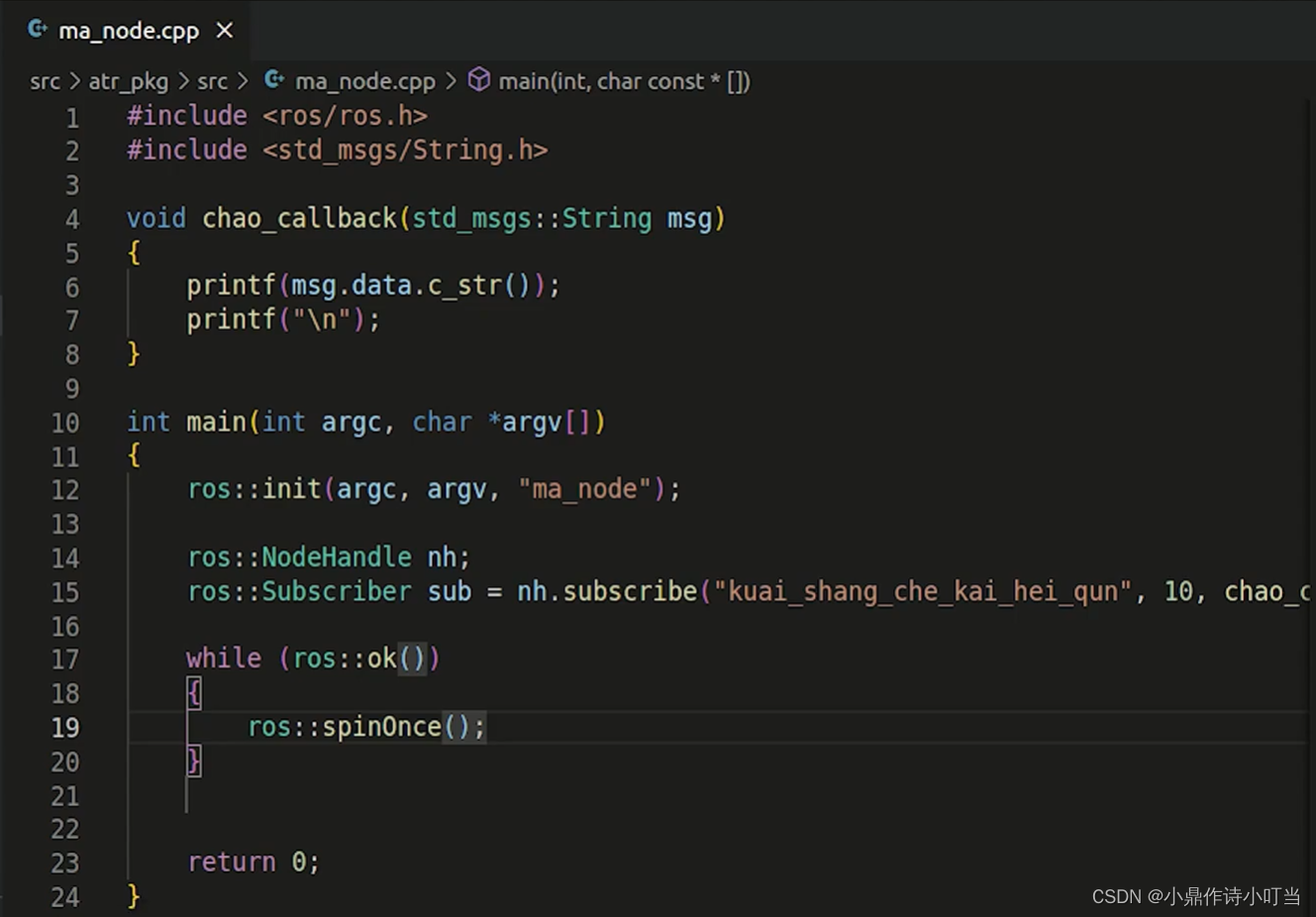
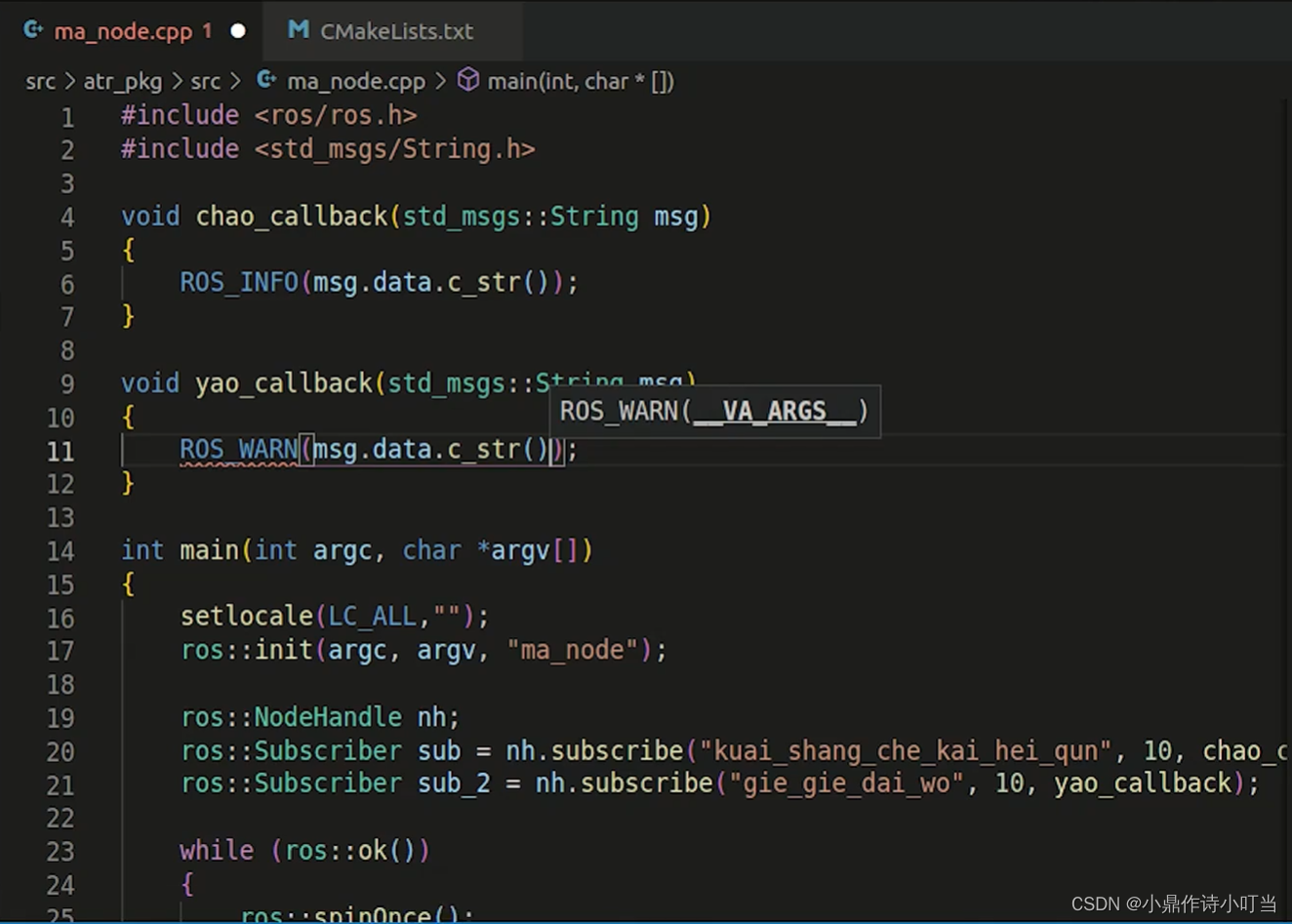
按下 Alt +↑切换到节点终端

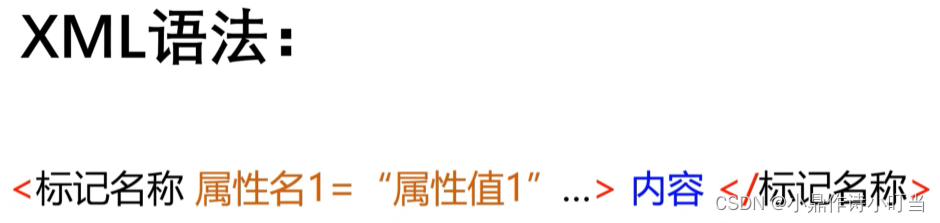
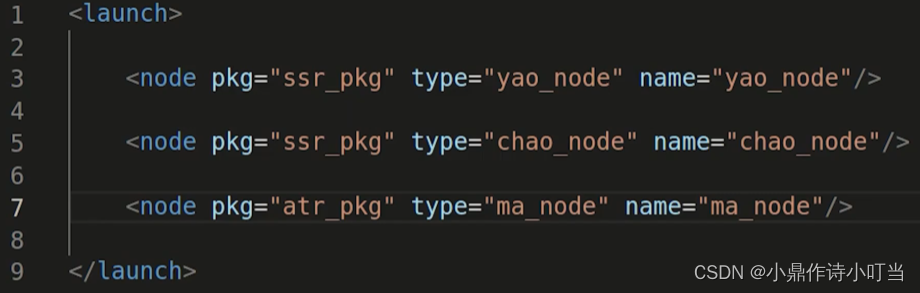
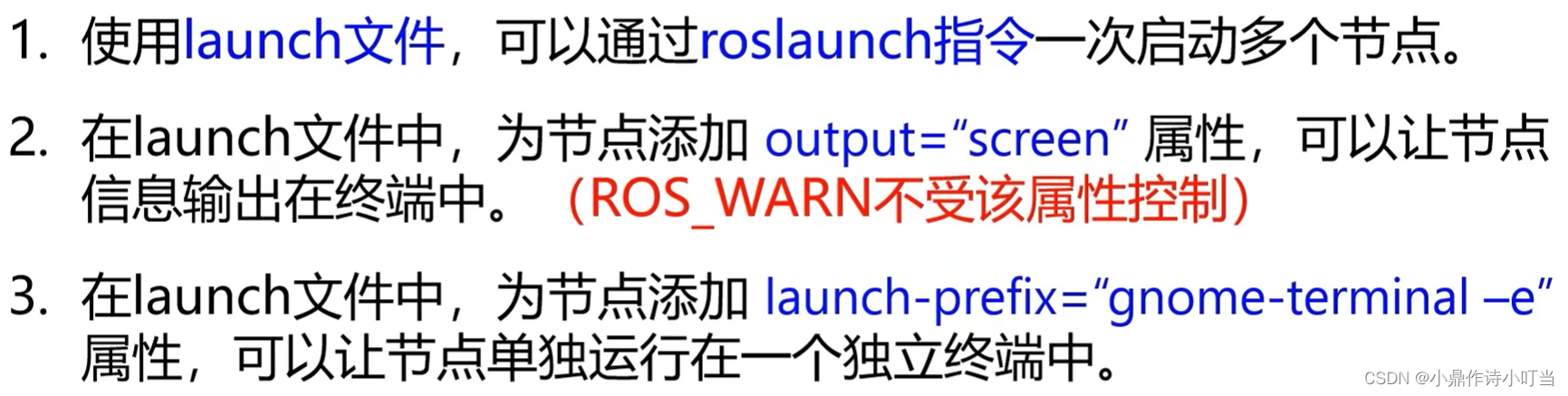
15.使用launch文件启动多个ROS
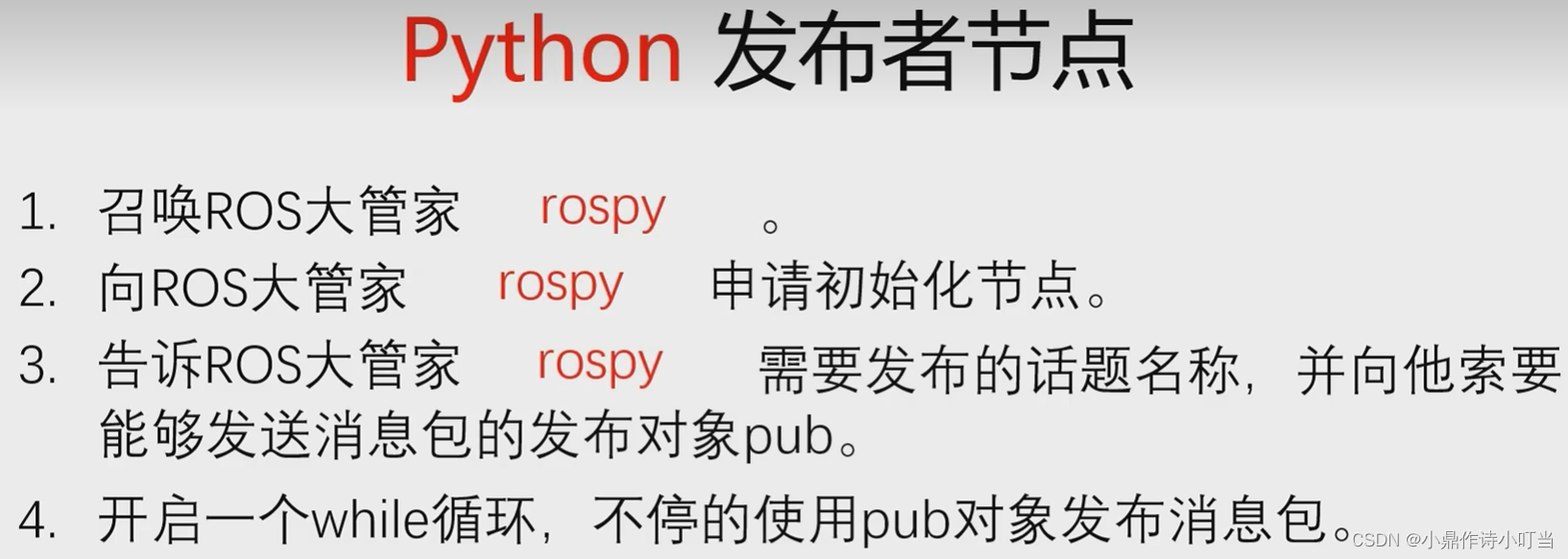
16.Publisher发布者的Python实现
17.Subscriber订阅者的Python实现

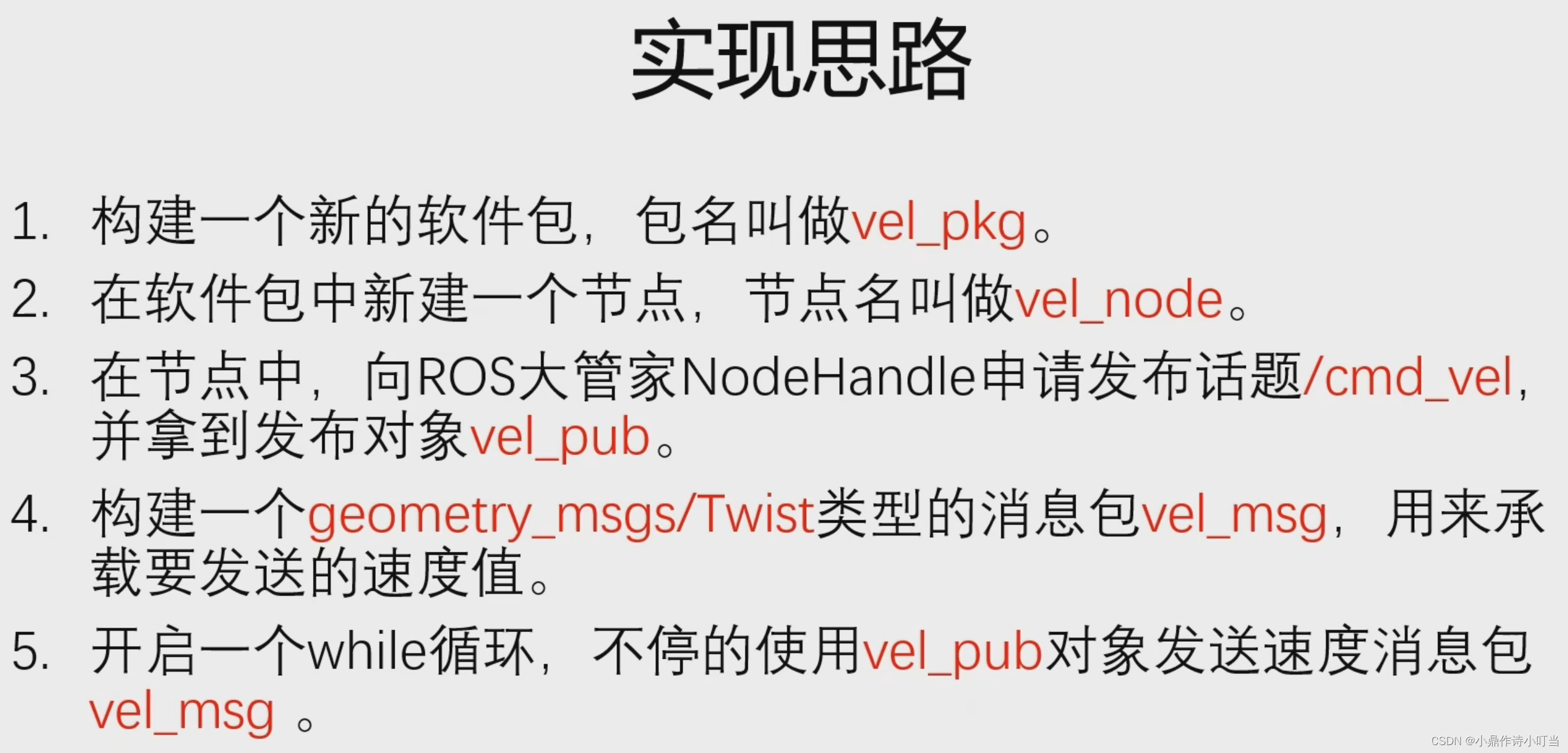
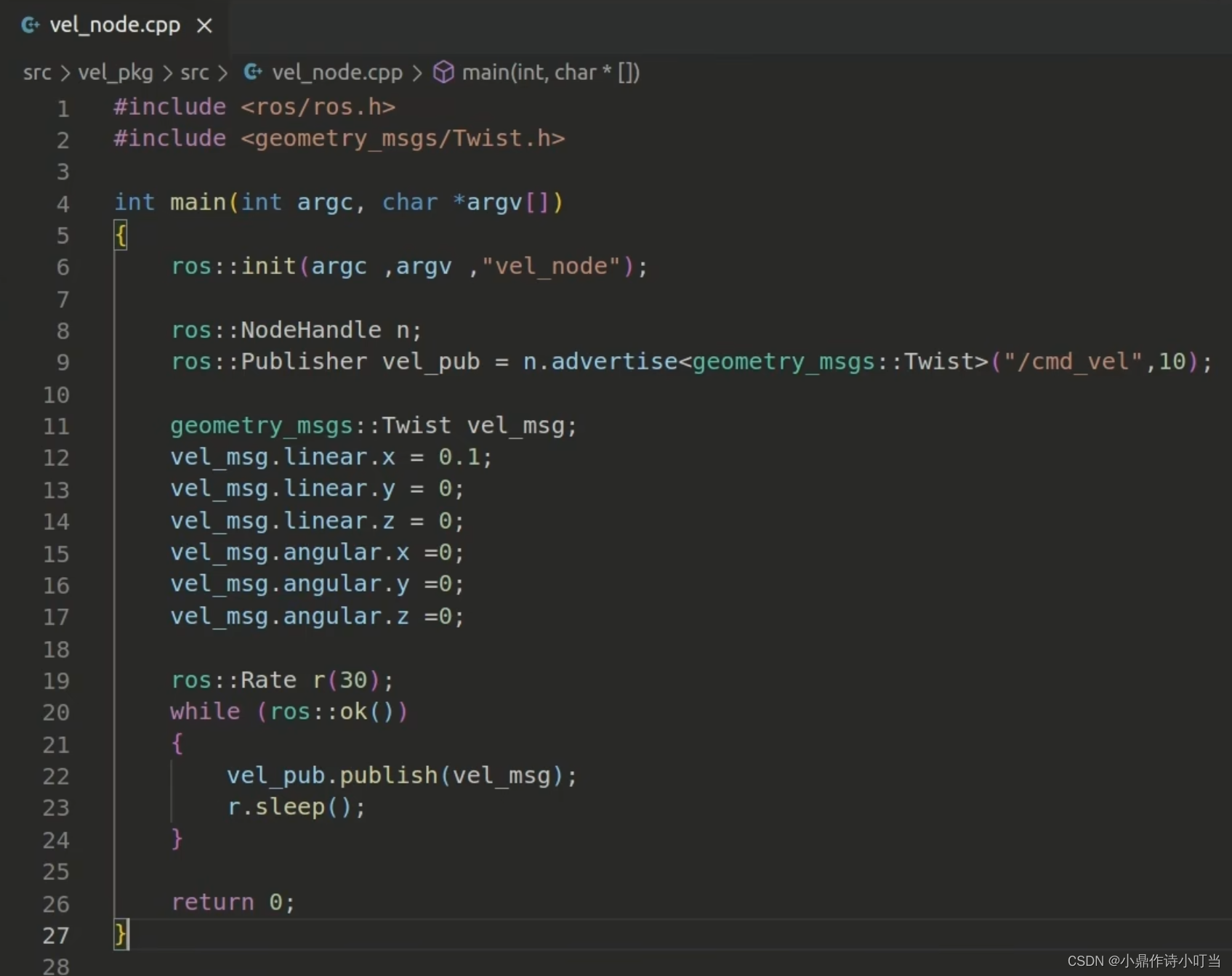
19.机器人运动控制的C++实现















 3174
3174











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









