






第一步:下载和编译Turtlebot3 description package
注意要把Turtlebot3放在noetic_ws/src里面进行编译
isst@isst:~/noetic_ws/src$
git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3.git turtlebot3第二步:进入turtlebot3/turtlebot3_description/urdf/看turtlebot3_burger的后缀是否为.urdf
将.xacro文件转换为 .urdf 文件在终端输入
isst@isst:~/noetic_ws/src/turtlebot3/turtlebot3_description/urdf$
rosrun xacro xacro -o turtlebot3_burger.urdf turtlebot3_burger.urdf.xacro
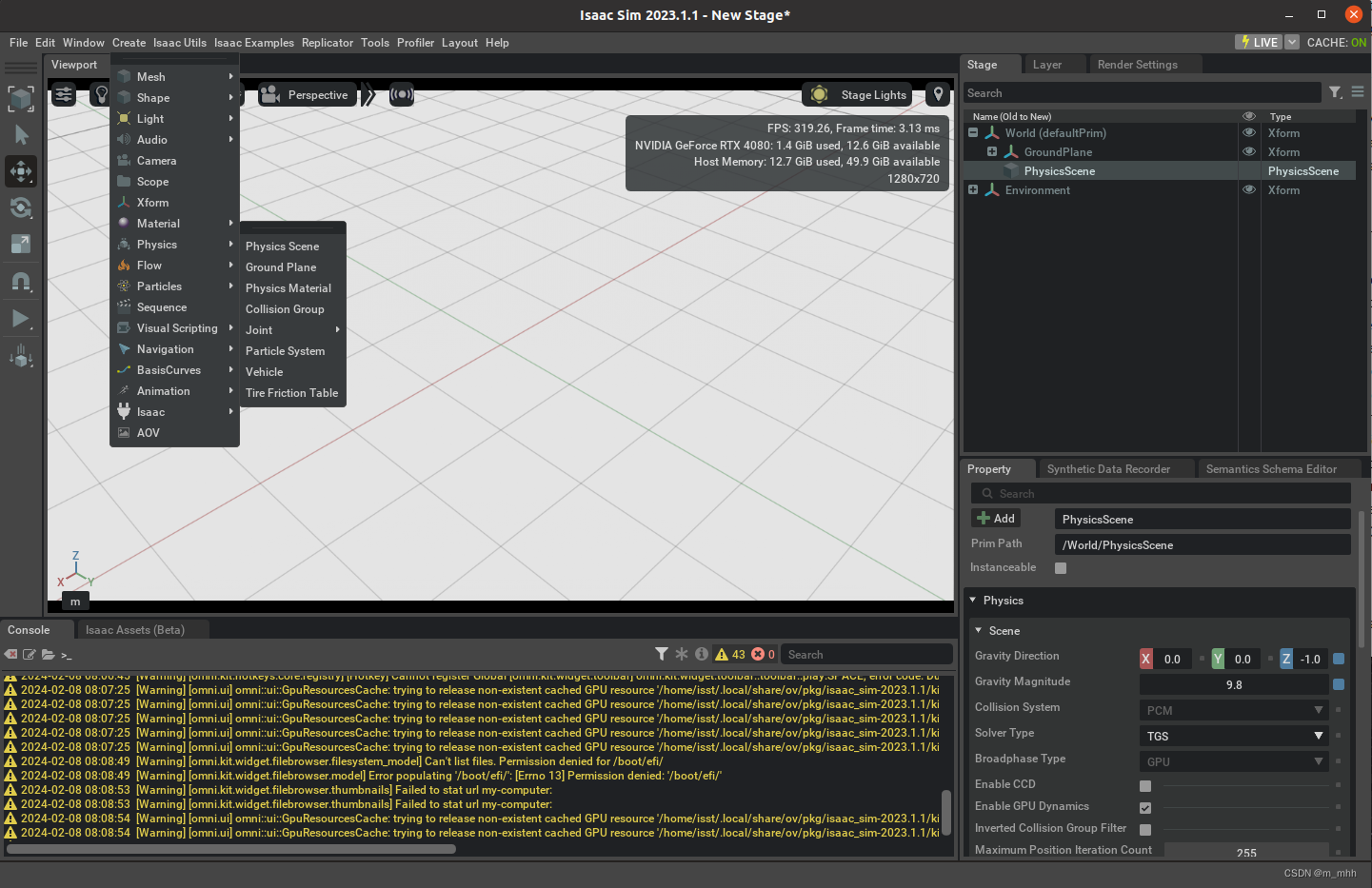
第三步:打开isaac sim,设置场景GroundPlane 和 PhysicsScene
 第三步:调整机器人
第三步:调整机器人
只要 Omniverse Isaac Sim 中的材料、物理和关节属性是可用的,并且有匹配的类别,URDF 导入程序就会自动导入。但是,如果没有可用的或匹配的类别,或者两个系统的单位不同,自动填入的内容可能不准确,并会改变机器人的行为。以下是调整一些常用参数的步骤。
摩擦属性
如果您的机器人车轮打滑,请尝试按照添加简单物体中的 3.4.2 步骤更改车轮的摩擦系数,也可能更改地面的摩擦系数。
物理属性
如果没有给出明确的质量或惯性属性,物理引擎将从几何网格中估算出这些属性。要更新质量和惯性属性(You can verify this by finding “Physics > Rigid Body” under its property tab). 如果已经有“Mass”类别,则直接进行相应修改。如果还没有“Mass”,通过点击"+Add" button(在Propery tab 的最上方),选择 “Physics > Mass”.
关节属性
如果您的机器人在关节处摆动或移动速度太慢,请查看关节的刚度和阻尼参数。高刚度会使关节更快、更坚硬地卡住目标,而高阻尼会使关节运动更平滑,但也会减慢关节向目标运动的速度。
对于纯位置驱动,应设置相对较高的刚度和较低的阻尼。
对于速度驱动,刚度必须设置为零,阻尼不能为零。
我们提供了两种工具来帮助检查关节并调整刚度和阻尼参数: 增益调谐器 Gain Tuner和关节检查器Articulation Inspector。















 2727
2727











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









