







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
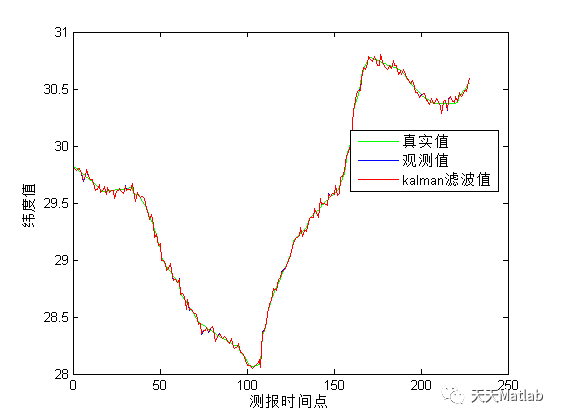
卡尔曼滤波可以通过运动方程及概率统计实现对一般事物发展的预测,因为不需要追溯历史数据,只需根据上一时刻的状态来预测下一时刻的状态,所以在故障诊断,巡航制导等方面应用广泛.基于此,将卡尔曼滤波作为预测模型来实现飞行物体运动轨迹预测.
⛄ 部分代码
%使用卡尔曼滤波方法对飞行航班进行轨迹预测
%数据来源:FlightAware(https://zh.flightaware.com)
%航 班:CES9937 宁波栎社国际机场飞往成都双流国际机场
%飞行时间:2018-07-17 07:07-09:55
%说明:取起飞后,前20组数据作为实验数据。对时间点进行近似取值,假设每隔30s上报一次数据
clear;
clc;
%采样点的个数
N=228;
%测试数据:纬度
latitude=load('.\CES9937\latitude.txt');
%真实维度值
lat=latitude;
%卡尔曼滤波处理的状态,即估计值
lat_kf=zeros(1,N);
%测报值
lat_z=zeros(1,N);
P=zeros(1,N);
%初始纬度值
lat(1)=29.8131;
%初始值的协方差
P(1)=0.09;
%初始测报值
lat_z(1)=29.8027;
%初始估计状态。假设和初始测报值相同
lat_kf(1)=lat_z(1);
%噪声方差
%系统噪声方差
Q=0.1;
%测量噪声方差
R=0.001;
%方差决定噪声大小
W=sqrt(Q)*randn(1,N);
V=sqrt(R)*randn(1,N);
⛄ 运行结果

⛄ 参考文献
[1] 戴礼灿, 刘欣, 张海瀛,等. 基于卡尔曼滤波算法展开的飞行目标轨迹预测.
[2] Jing L I , Jiulun F , 李晶, et al. Algorithm for moving object tracking based on Kalman filter一种基于卡尔曼滤波的运动物体跟踪算法[J]. 计算机应用研究, 2010, 27(8):3162-3164.
[3] 邱润黎敬涛李孝疆杨改娣宋开雨. 基于卡尔曼滤波算法的轨迹预测[J]. 电视技术, 2022, 46(6):24-28.
[4] 谭菊. 基于Kalman滤波的目标轨迹预测[J]. 重庆文理学院学报(自然科学版), 2009.
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
















 7719
7719











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











