







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
在现代科技领域中,姿态解算是一个非常重要的研究领域。姿态解算的目标是通过利用传感器数据来估计物体的方向和姿态,从而实现精确的定位和导航。随着技术的发展和传感器的进步,九轴传感器在姿态解算中扮演着重要的角色。本文将介绍基于扩展卡尔曼滤波的九轴传感器姿态解算研究。
九轴传感器是一种集成了加速度计、陀螺仪和磁力计的传感器。通过测量物体在三个方向上的加速度、角速度和磁场强度,九轴传感器可以提供丰富的数据用于姿态解算。然而,由于传感器本身存在噪声和误差,直接使用传感器数据来进行姿态解算是不可行的。因此,我们需要使用滤波算法对传感器数据进行处理和优化。
扩展卡尔曼滤波是一种常用的滤波算法,广泛应用于姿态解算中。该算法通过将姿态解算问题建模为状态估计问题,并利用卡尔曼滤波的递归估计方法来对姿态进行估计。扩展卡尔曼滤波结合了非线性系统的特点,可以有效地处理传感器数据中的非线性和噪声。
在九轴传感器姿态解算中,扩展卡尔曼滤波需要建立姿态的状态方程和观测方程。状态方程描述了姿态的动态变化过程,观测方程描述了传感器数据与姿态之间的关系。通过不断地更新状态方程和观测方程,扩展卡尔曼滤波可以实时地估计物体的姿态。
在实际应用中,九轴传感器姿态解算还需要考虑到传感器的校准和误差补偿。由于传感器存在误差和偏差,需要对传感器进行校准,以提高姿态解算的准确性。同时,传感器的误差也需要进行补偿,以消除误差对姿态解算的影响。
除了扩展卡尔曼滤波,还有其他一些滤波算法可以用于九轴传感器姿态解算,如粒子滤波和无迹卡尔曼滤波。这些滤波算法在不同的应用场景中具有各自的优势和适用性。研究人员可以根据具体的需求和应用选择合适的滤波算法。
总结起来,基于扩展卡尔曼滤波的九轴传感器姿态解算研究在现代科技领域中具有重要的应用价值。通过利用九轴传感器提供的丰富数据和扩展卡尔曼滤波的优势,可以实现精确的姿态解算,为定位和导航等应用提供可靠的支持。未来,随着技术的不断发展和研究的深入,九轴传感器姿态解算将在更多领域中得到广泛应用,并为人们的生活带来更多便利和创新。
📣 部分代码
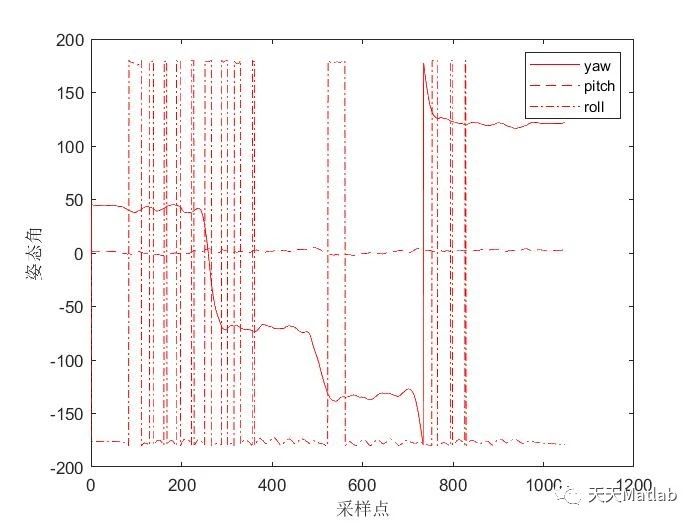
clear ;close allclc;load('data.mat');% ox,oy,oz是手机自带方向传感器测量的姿态角,可以与解算的姿态角作对比% dt采样间隔% updateVect用来判断加速度计、陀螺仪、磁力计是否全部完成了一次测量,这里假设它们测量频率相同NLength = min(length(mx),length(ox));NLength = min(length(gx),NLength);NLength = min(length(ax),NLength);dt = 0.02;q=[0.0001,0.08,0.009,0.005];r=[0.0008,1000,100];updateVect=[1,1,1];% 初始化x_aposteriori=[gx(1),gy(1),gz(1),0,0,0,ax(1),ay(1),az(1),mx(1),my(1),mz(1)]';P_aposteriori=zeros(12,12);yaw=zeros(1,NLength); pitch=zeros(1,NLength); roll=zeros(1,NLength);for i = 2:NLengthz=[gx(i),gy(i),gz(i),ax(i),ay(i),az(i),mx(i),my(i),mz(i)]';[ x_aposteriori,P_aposteriori,RotMatrix,roll(i),pitch(i),yaw(i)]=AttltitudeEKF(updateVect,dt,z ,q,r,x_aposteriori,P_aposteriori);endfigure(1)plot(yaw,'r');hold onplot(pitch,'r--');hold onplot(roll,'r-.');xlabel('采样点')ylabel('姿态角')legend('yaw','pitch','roll');
⛳️ 运行结果
🔗 参考文献
[1] 赵瑜,周波,綦俊峰,等.基于双阶卡尔曼滤波的九轴姿态融合算法研究[J].电子世界, 2019(7):2.DOI:CNKI:SUN:ELEW.0.2019-07-052.
[2] 丁明杰,胡桥,苏文斌,等.基于扩展卡尔曼滤波的矢量推进水下机器人姿态解算方法研究[J].无人系统技术, 2020, 3(3):9.
[3] 弋英民,王柯颖,苑易伟,等.基于扩展卡尔曼滤波的姿态解算系统及解算方法:CN202110069679.X[P].CN112945225A[2023-09-14].
















 1262
1262











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











