







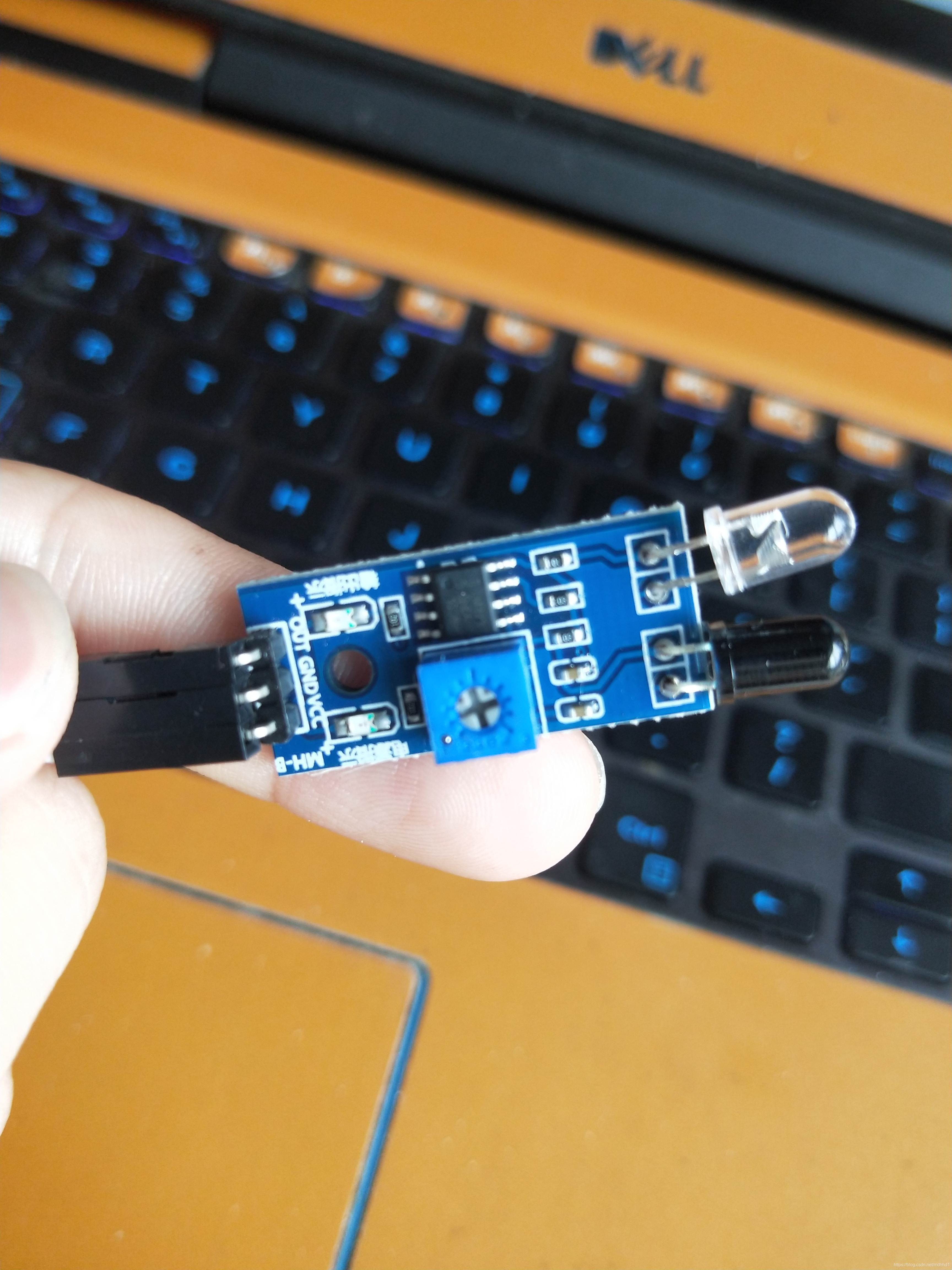
一、红外避障传感器介绍
红外避障传感器是专为轮式机器人设计的一款距离可调式避障传感器。其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,此时指示灯亮起,经过电路处理后,信号输出接口输出数字信号,可通过电位器旋钮调节检测距离,有效距离2~40cm,工作电压为3.3V-5V,由于工作电压范围宽泛,在电源电压波动比较大的情况下仍能稳定工作,适合多种单片机、Arduino控制器、树莓派使用,安装到机器人上即可感测周围环境的变化。
二、规格参数:
1.工作电压:DC 3.3V-5V
2.工作电流:≥20mA
3.工作温度:-10℃—+50℃
4.检测距离:2-40cm
5.IO接口:4线制接口(-/+/S/EN)
6.输出信号:TTL电平(有障碍物低电平,无障碍物高电平)
7.调节方式:多圈电阻式调节
8.有效角度:35°
7.尺寸大小:28mm×23mm
三、python代码
#!/usr/bin/python
#-*- coding: utf-8 -*-
import time
import RPi.GPIO as GPIO
import os
GPIO.setmode(GPIO.BCM) #使用BCM编码方式
#定义引脚
GPIO_OUT = 23
led = 21
#设置23针脚为输入,接到红外避障传感器模块的out引脚
GPIO.setup(GPIO_OUT,GPIO.IN)
GPIO.setup(led,GPIO.OUT)
def warn(): #亮灯来作为有障碍物时发出的警告
GPIO.output(led,GPIO.HIGH)
time.sleep(0.5)
GPIO.output(led,GPIO.LOW)
time.sleep(0.5)
while True:
if GPIO.input(GPIO_OUT)==0: #当有障碍物时,传感器输出低电平,所以检测低电平
warn()
#print("There has a barrier")
#else:
# print("OK")
GPIO.cleanup()















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









