







 Simultaneous Catheter and Environment Modeling for Trans-catheter Aortic Valve Implantation
Simultaneous Catheter and Environment Modeling for Trans-catheter Aortic Valve Implantation
Authors: Chaoyang Shi, Stamatia Giannarou, Su-Lin Lee, Guang-Zhong Yang, Fellow, IEEE
Source:2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014) September 14-18, 2014, Chicago, IL, USA
摘要:本文提出了一种基于血管内超声(IVUS)成像、电磁(EM)跟踪和形状传感数据融合的经股动脉经导管主动脉瓣植入术(TAVI)的脉管系统重建和导管建模方案。该系统适用于使用IVUS探头获取主动脉的内部横截面图像,利用电磁(EM)传感器对IVUS探头相应姿态信息的传感器融合来重建其3D虚拟模型,以及基于光纤重建导管形状与光纤布拉格光栅(FBG)传感器。已经创建了一个由IVUS传感器、EM传感器和光学形状传感器组成的混合探头,并在体外硅胶主动脉模型上进行了测试。提出了一种基于梯度矢量流(GVF)蛇形的实用图像处理方法,然后结合来自EM传感器的姿态信息进行融合,用于解剖模型重建。在两个主动脉模型上演示了所提出的方法。初步结果显示了形状传感器如何实现导管形状重建。所提出的方法可以促进瓣膜对准的术中手术引导,提高定位精度,减少TAVI手术时间,最大限度地减少造影剂的使用,并评估术后瓣膜展开的状态。
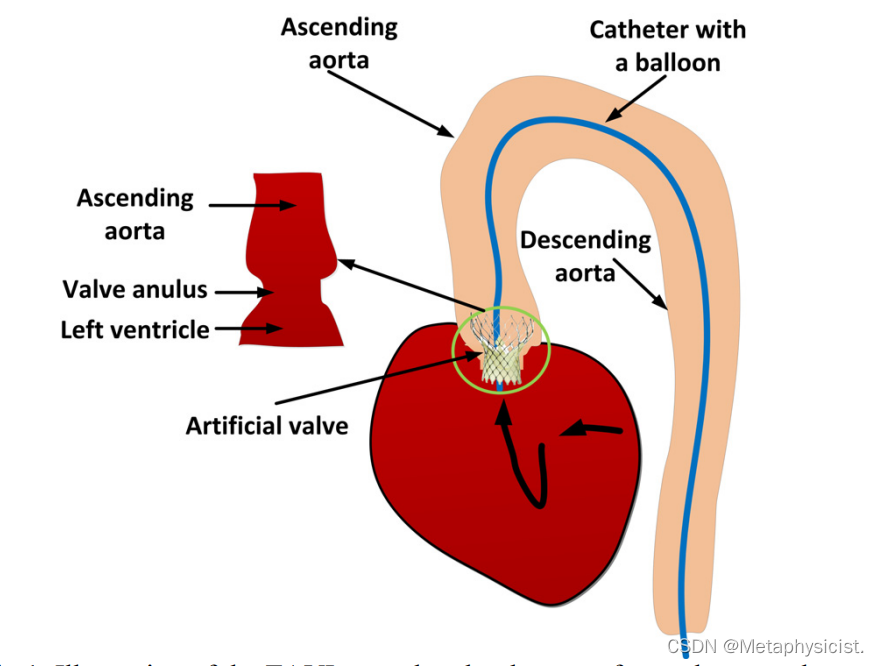
图 1:经股动脉入路的 TAVI 手术图示。
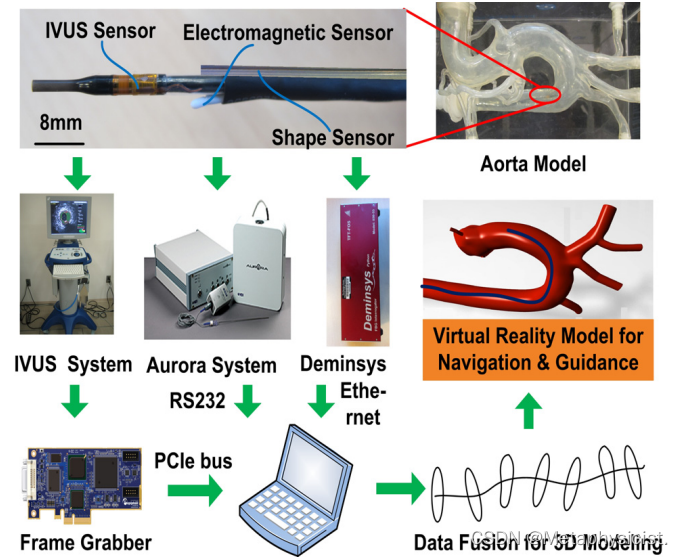
图2:整个系统的传感器融合框架和硬件配置。混合探头如左上角所示。

图3:使用FGB传感器的光纤设置

图4:从血管模型内部捕获的横截面视频帧示例
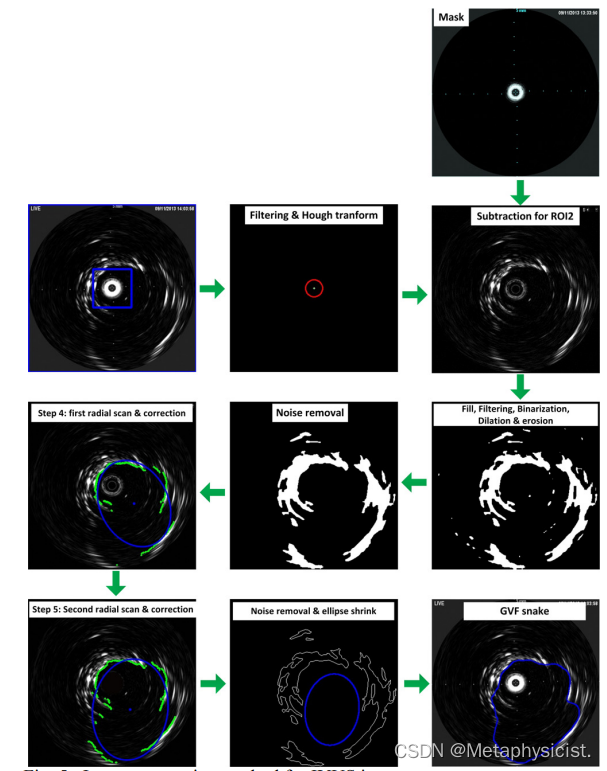
图5:IVUS图像的图像处理方法
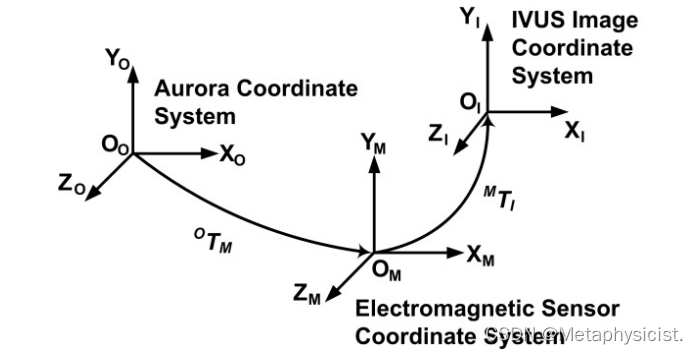
图6:IVUS发射器、EM传感器和Aurora磁场发射器坐标系之间的运动学变换
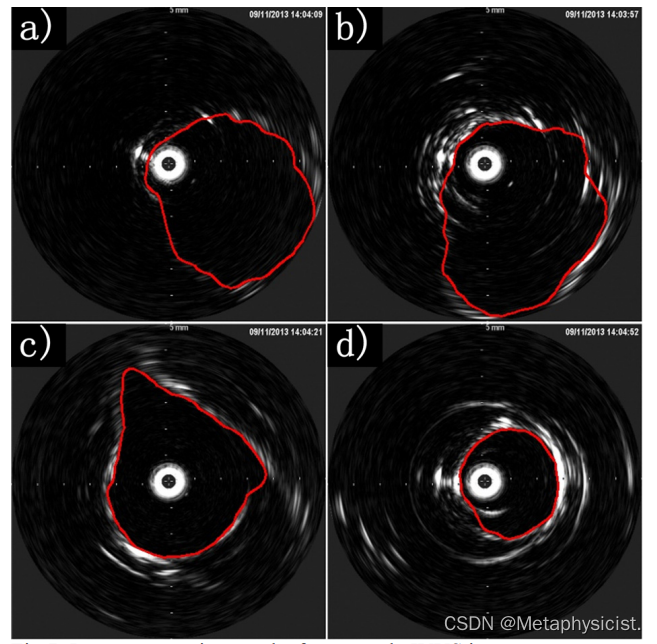
图7:IVUS图像的图像处理结果

图8:电磁传感器记录的轨迹

图10:基于传感器融合方法的刚性模型三维重建

图11:基于光纤光栅传感器的导管形状重建
Conclusion
本文基于IVUS成像和EM传感器的姿态信息之间的传感器融合,提出了一种用于主动脉3D血管内建模的实用解决方案。提出了一种用于IVUS图像全自动处理的有效图像处理流水线。在两个体外模型中进行了实验,以证明所提出的传感器融合方法的有效性。将研究动态流动条件和体内条件数据下的进一步实验。提出了一种基于光纤光栅传感器的导管形状重建方法。将进行进一步的实验,以评估这种重建方法的准确性并优化形状传感器的配置。
Reference:
[1] Shi, C., Giannarou, S., Lee, S. L., & Yang, G. Z. (2014, September). Simultaneous catheter and environment modeling for trans-catheter aortic valve implantation. In 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 2024-2029). IEEE.















 3779
3779











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











