







在机器人开发时,经常遇到不同坐标系之间互相转换的问题。不同传感器要统一到同一个坐标系下,做slam时,地图坐标系,移动机器人base坐标系,机械臂坐标系之间也需要互相转换,所以,就按照自己的思路,同时参考网上资料,把坐标变换整理一下做个记录。内容原创,仅供参考,如有错误,希望大家可以留言相互学习。
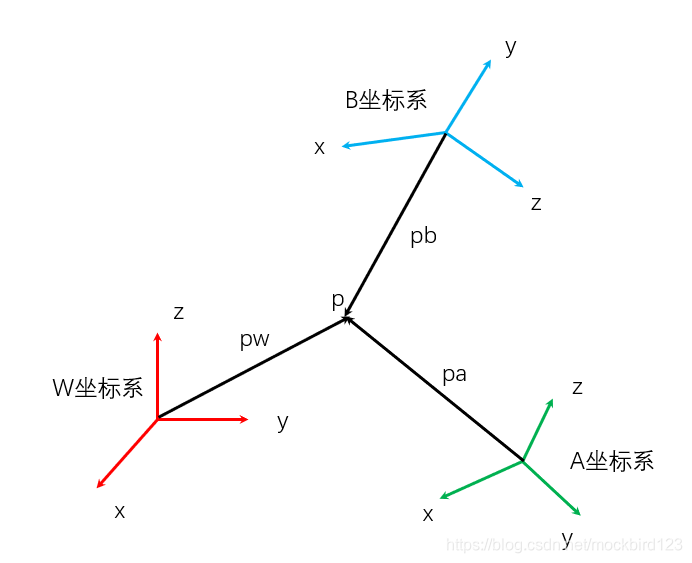
对于不同的三维空间坐标系W,A,B,其中W为世界坐标系,A、B为任意机器人坐标系。
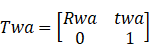
A在W中的位姿可以用平移加旋转表示,平移表示为三维向量twa,旋转表示为三维单位正交阵Rwa,旋转也可表示为四元数、欧拉角或轴角形式。平移向量twa和旋转矩阵组成变换矩阵Twa。
空间某一向量(点)p,在A系中坐标为pa,在W中的坐标可表示为pw = Twa * pa
同一点p
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1060
1060

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









