







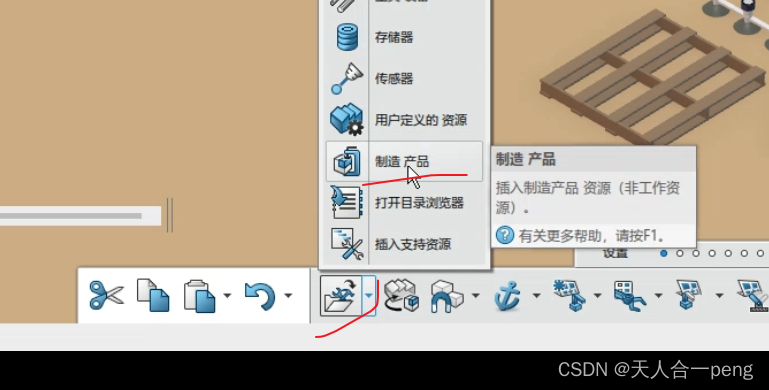
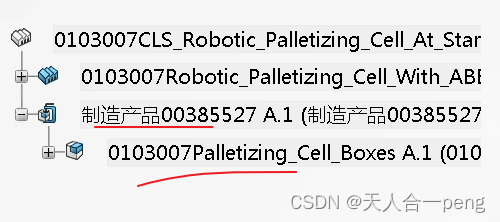
1 设置制造产品
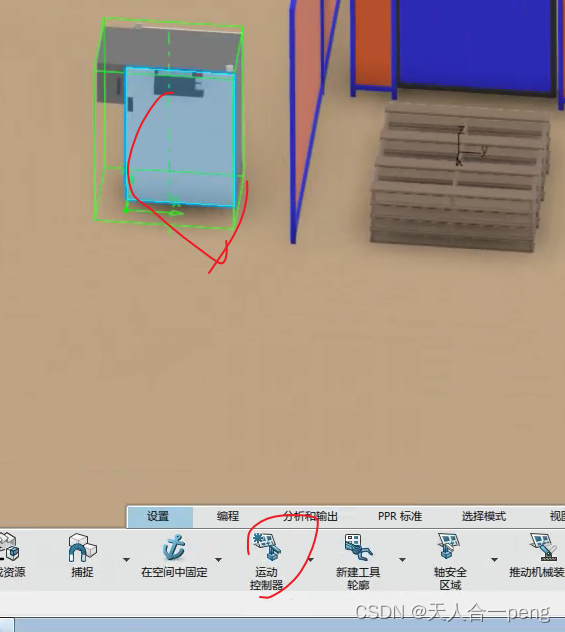
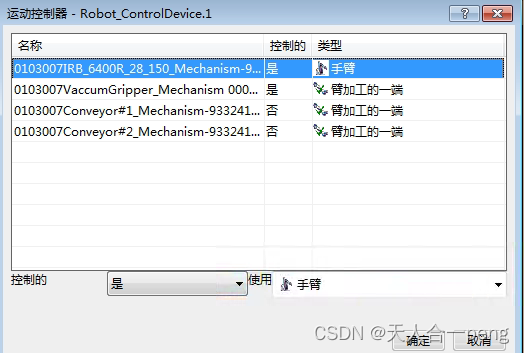
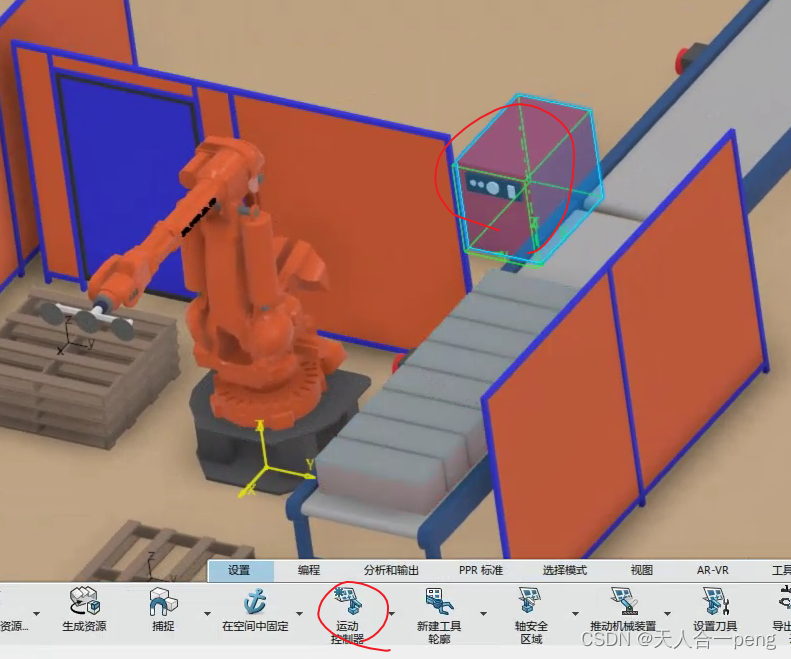
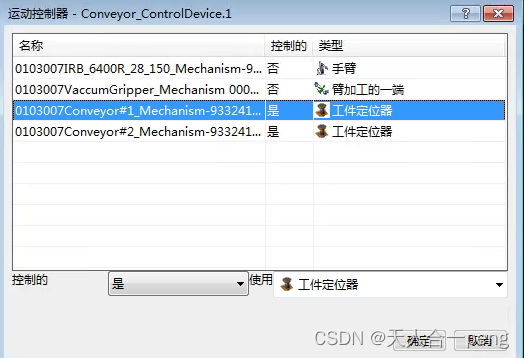
2 运动控制器设置
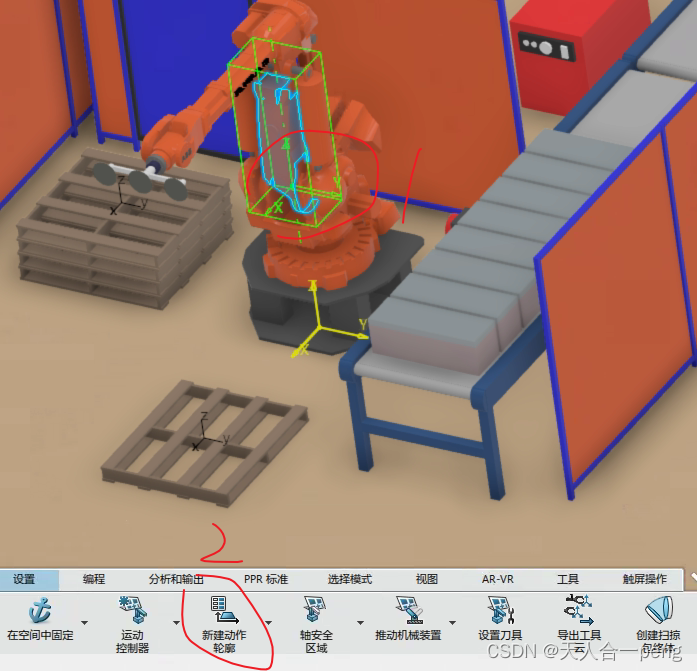
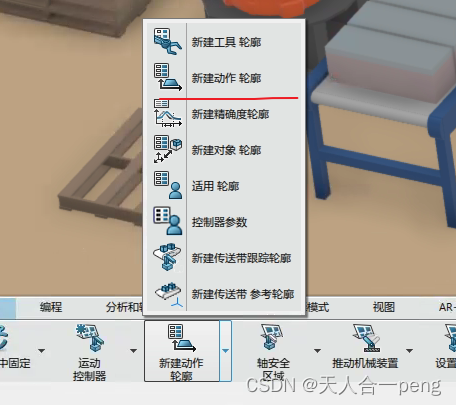
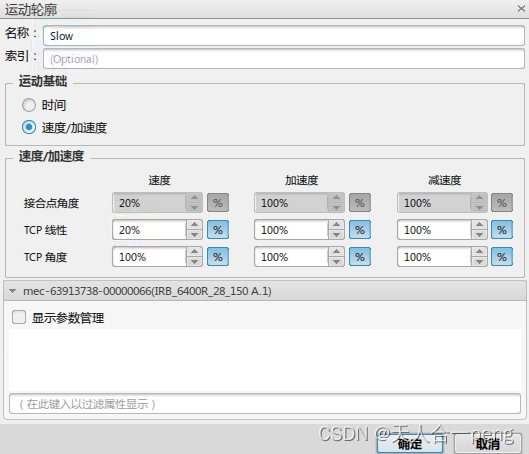
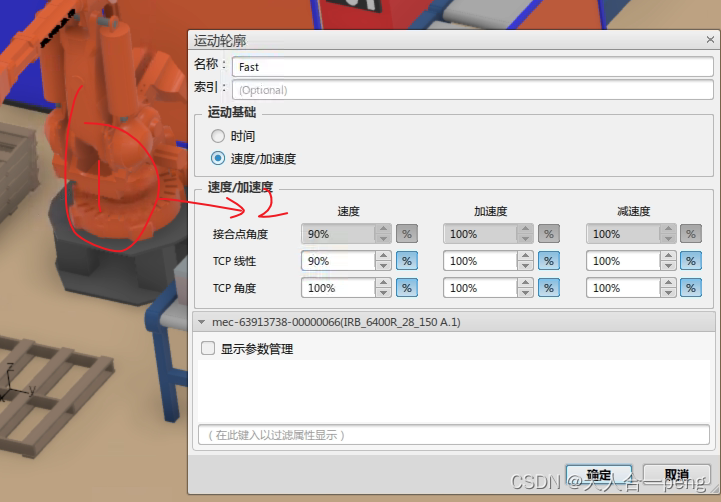
3 新建轮廓运动

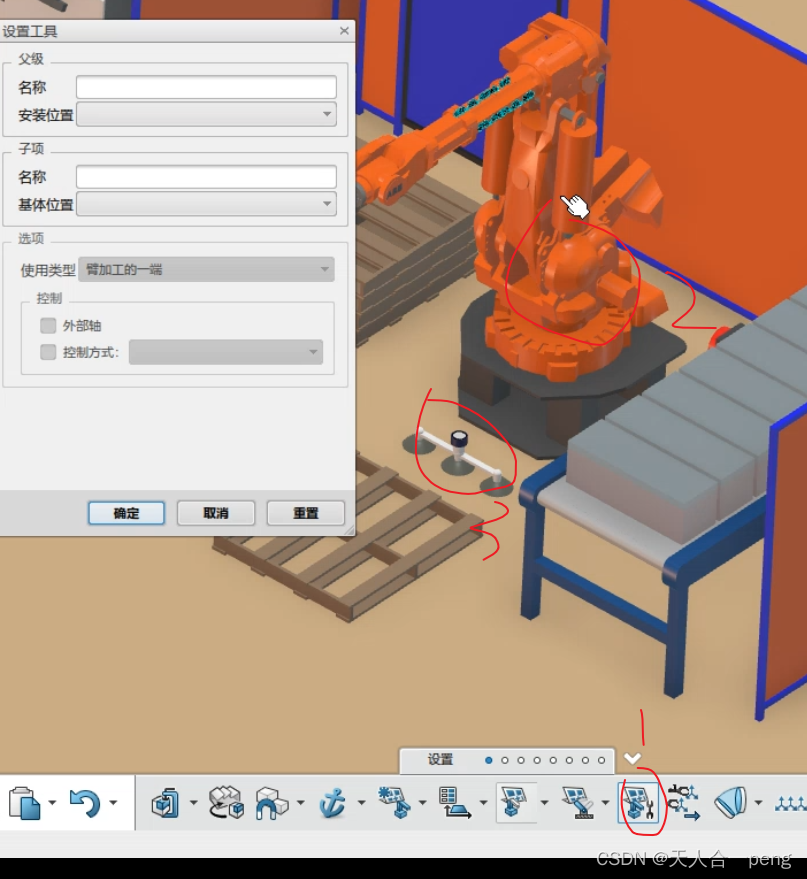
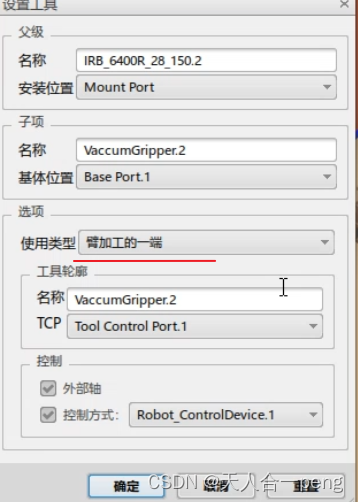
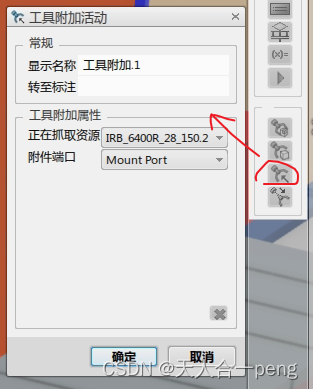
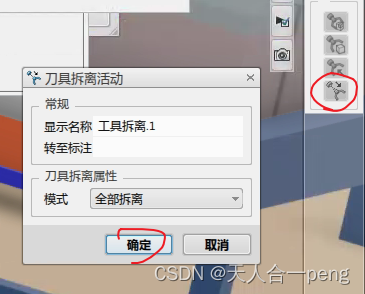
4 设置刀具
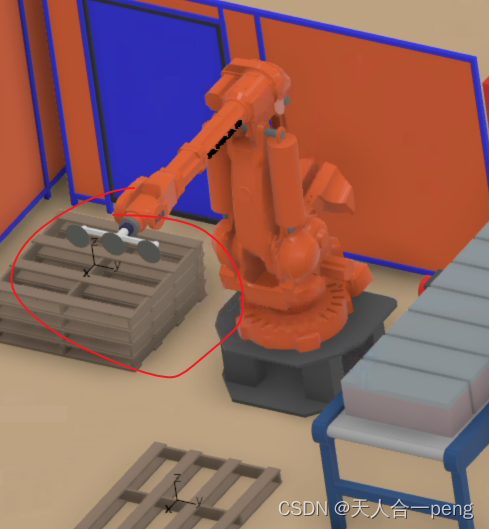
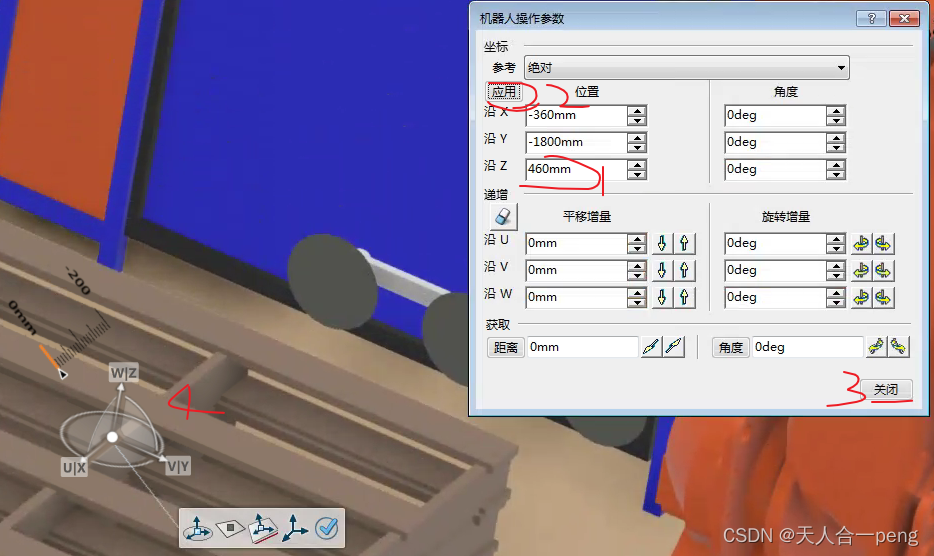
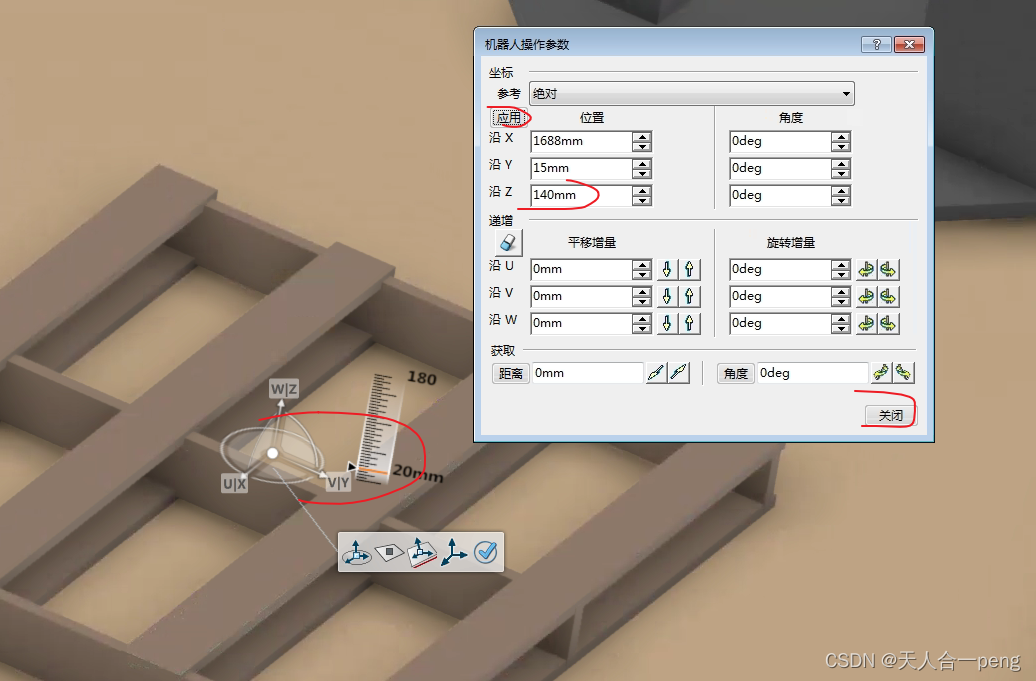
5 设置坐标组

先选中组

用点选的方式把两个物体的坐标选中
Group1双击后所有的能看到
每确定一次则新建一个坐标,
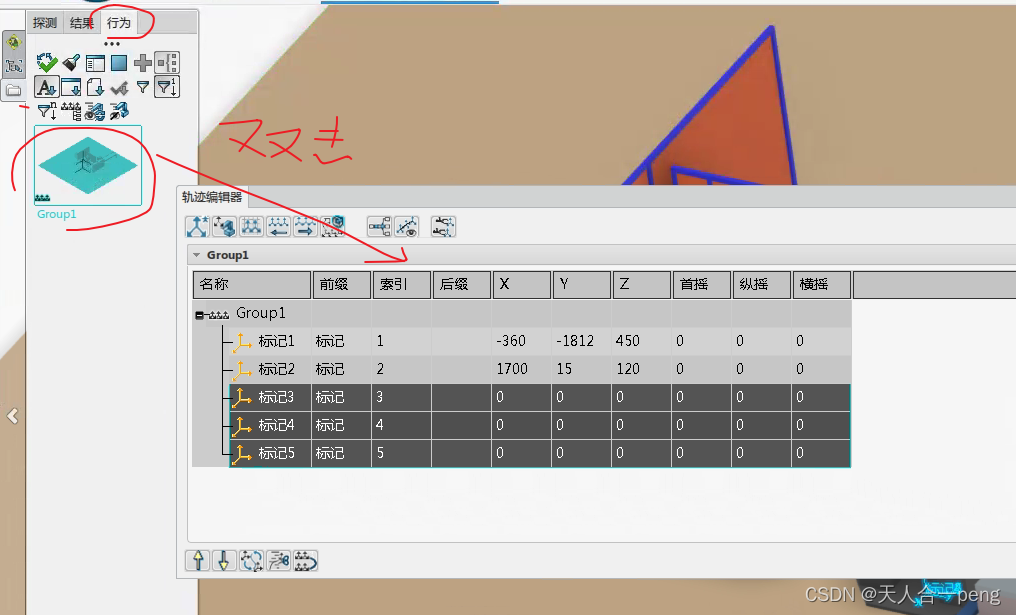

如果有错可以删完后新建坐标
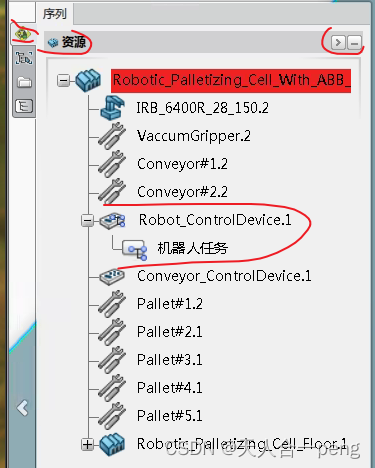
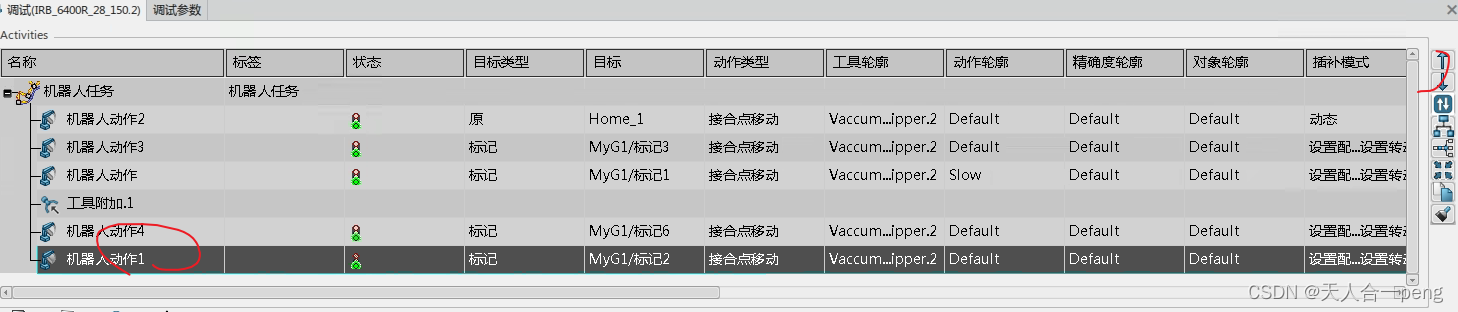
6 创建机器人任务
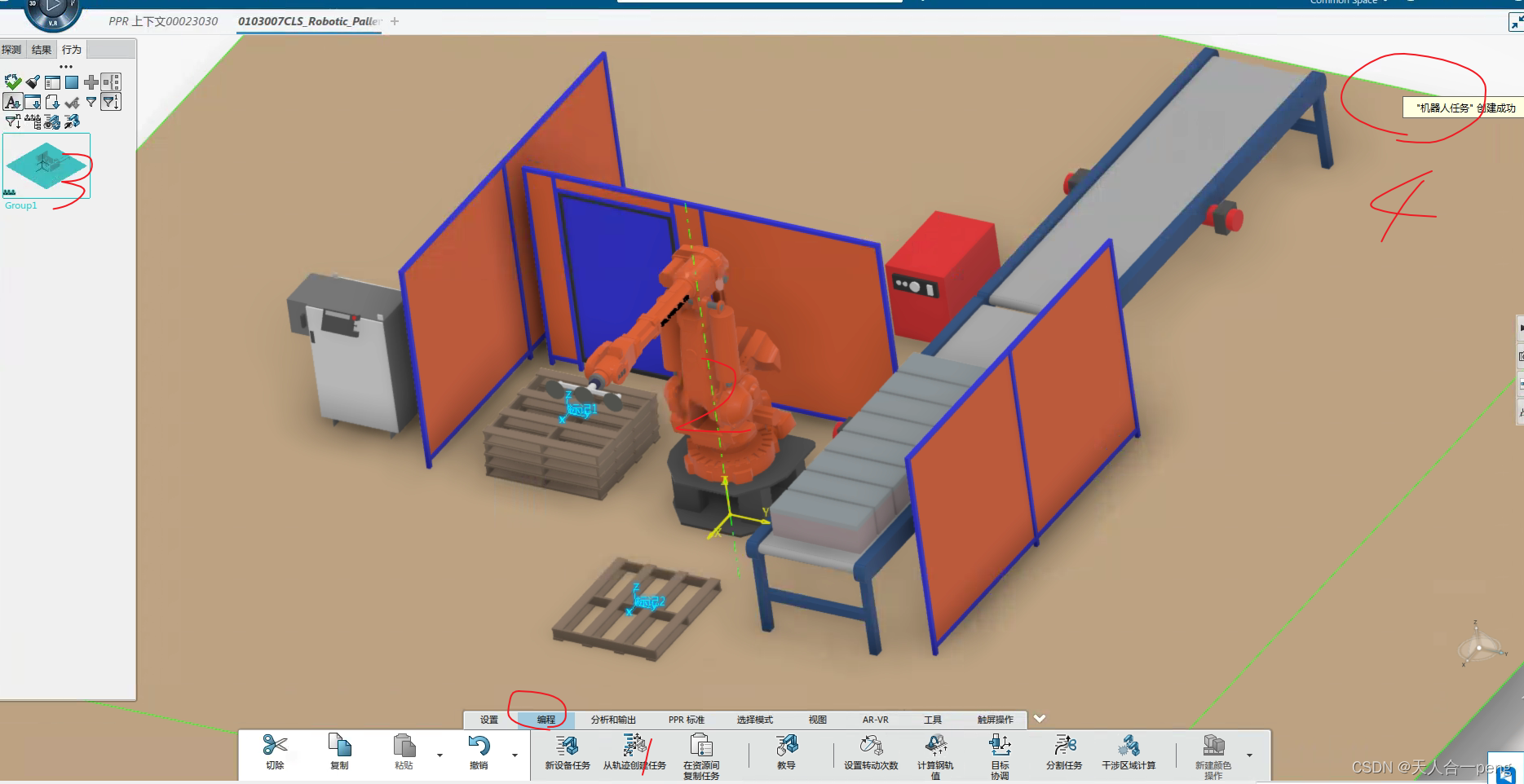
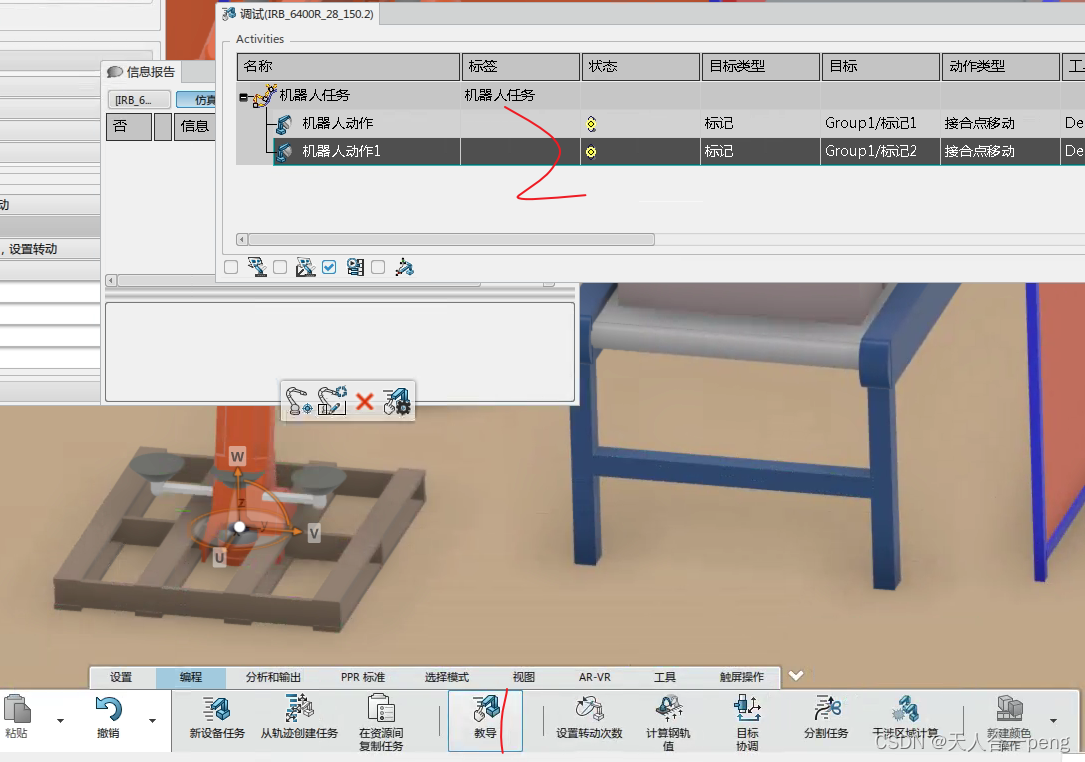
图中2双击则会机械臂会运动
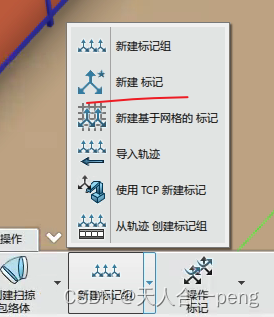
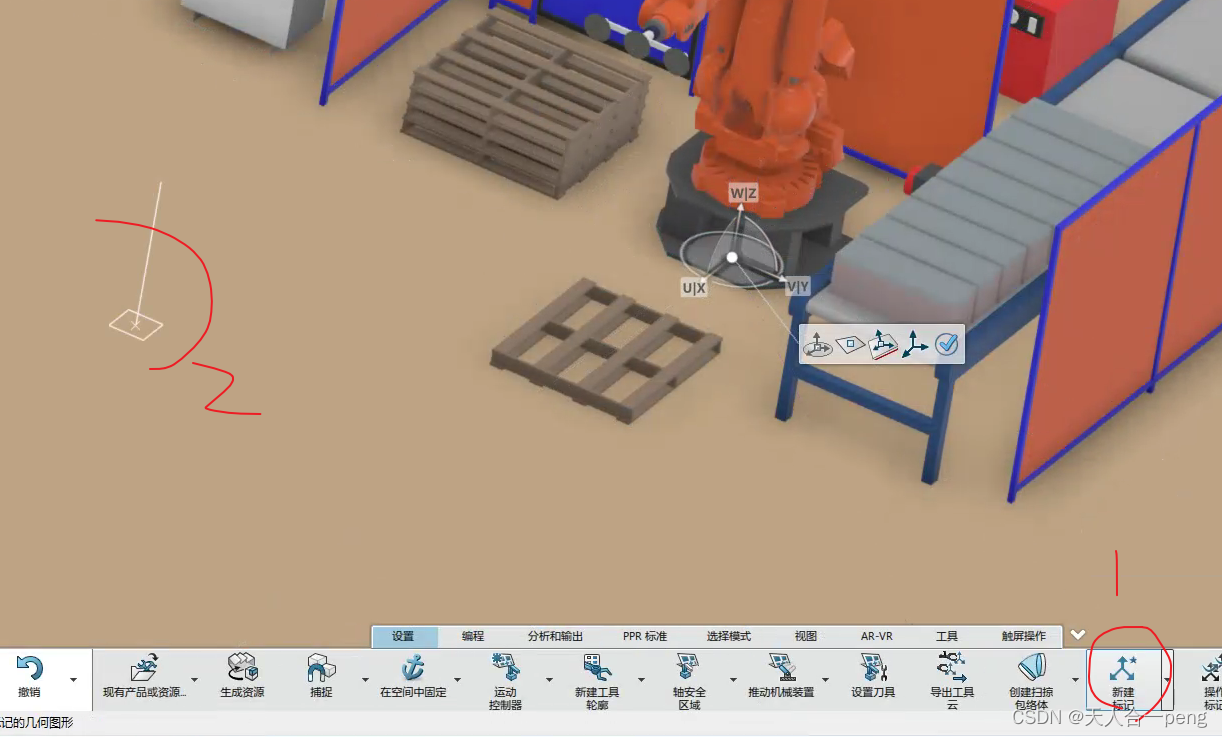
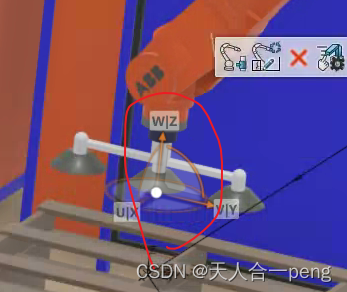
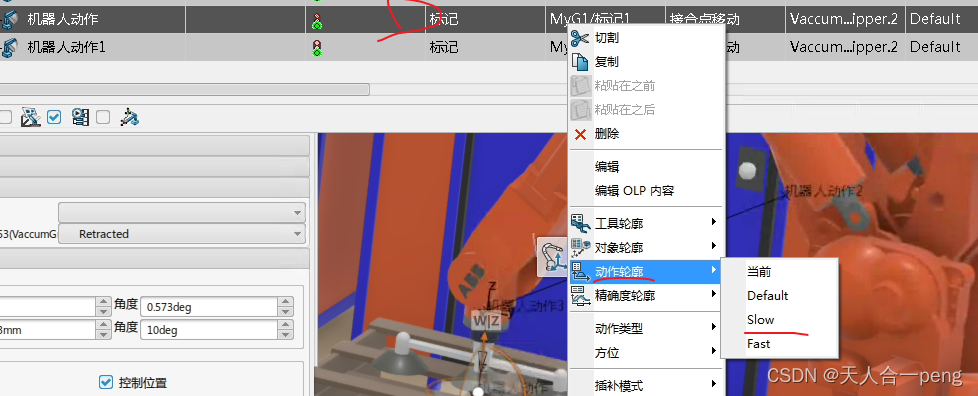
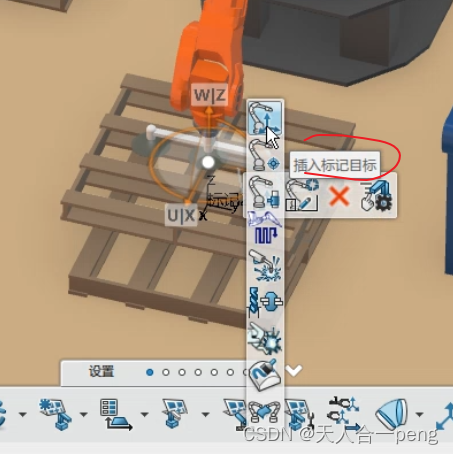
7 修改轨迹

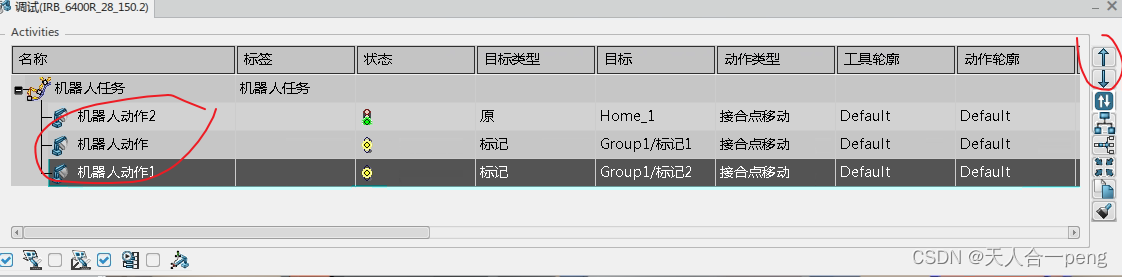
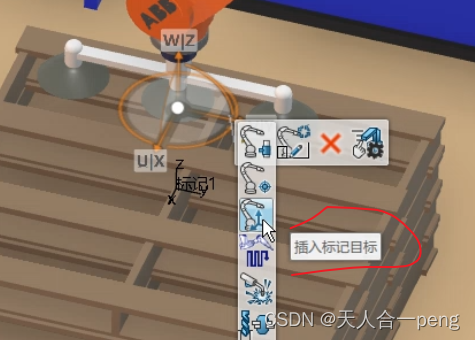
移动Z轴向上,并插入标记目标
调整顺序
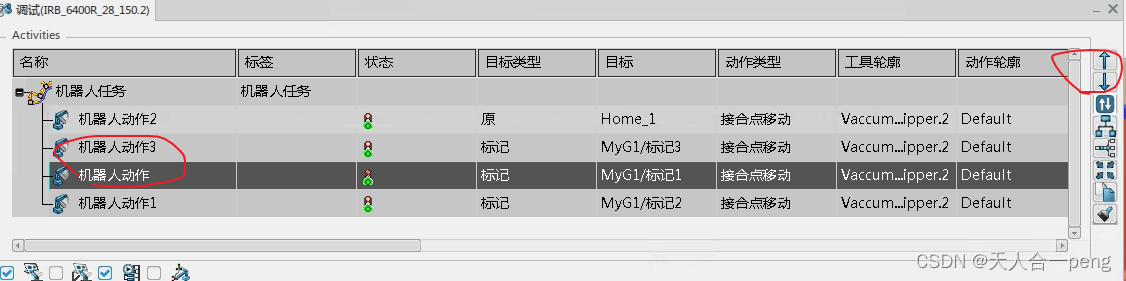
设置动作轮廓
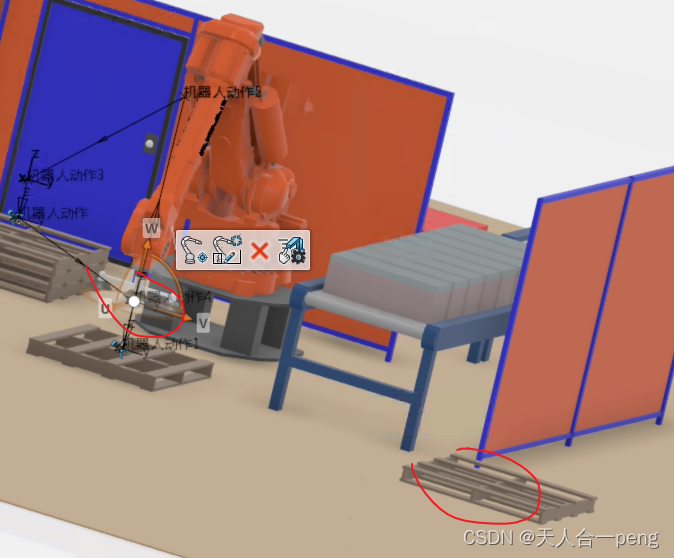
8 抓取零件
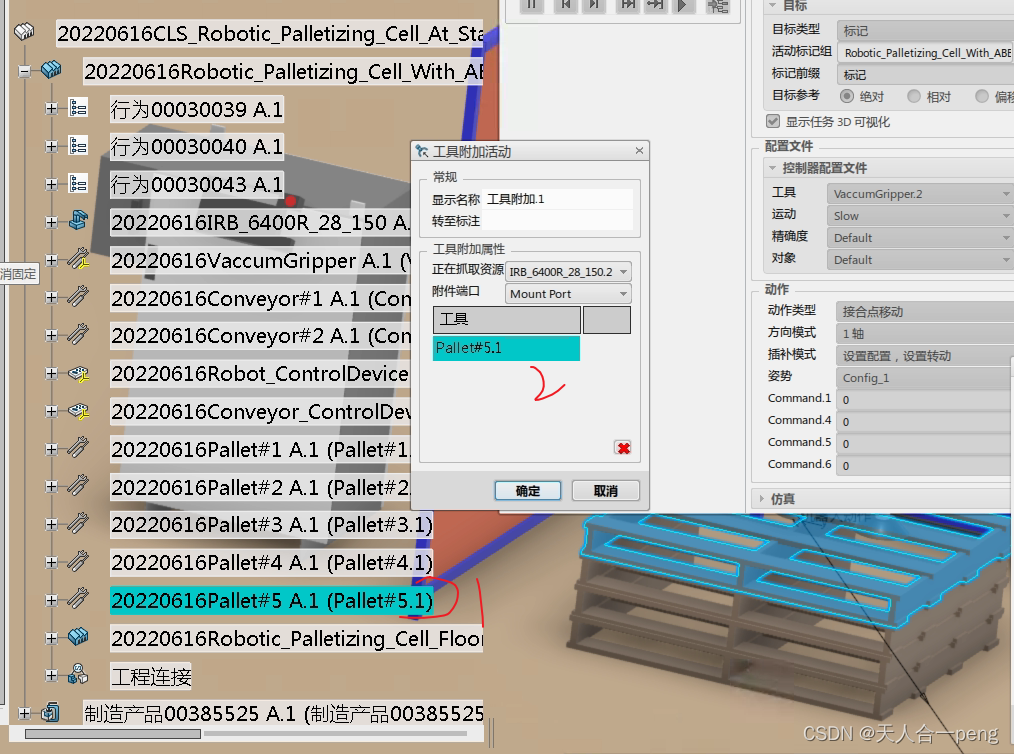
运动后双击向上移动Z轴,并插入标记目标
然后调整顺序
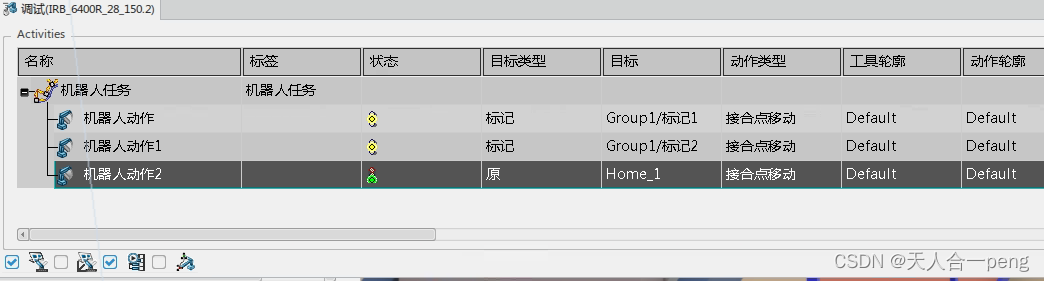
放下零件
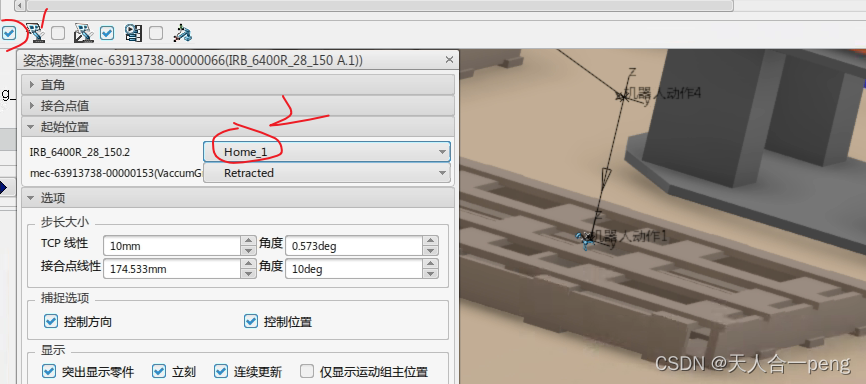
返回原点后对其设置为----接合点移动

但这样运行时零件和机械臂位置会错
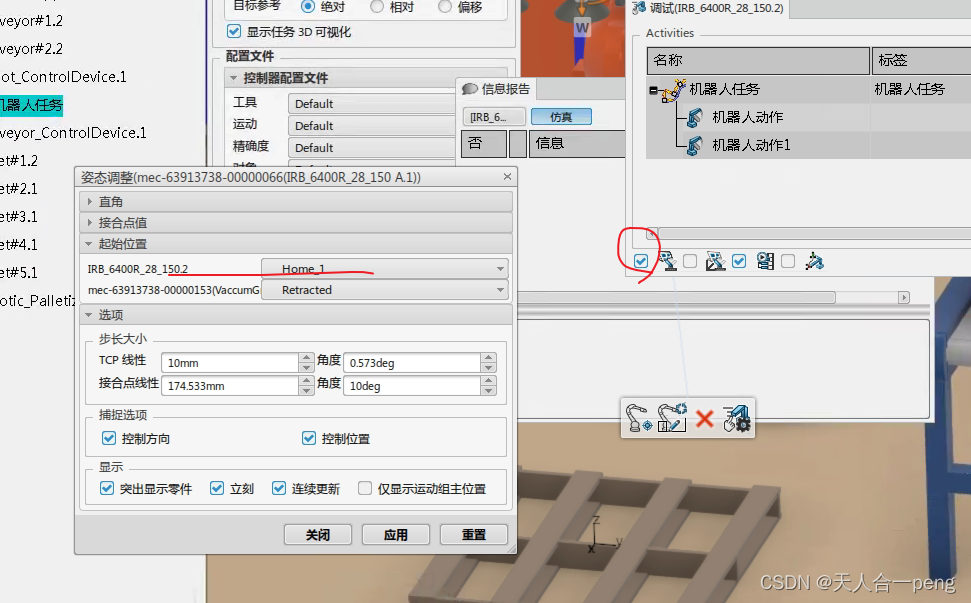
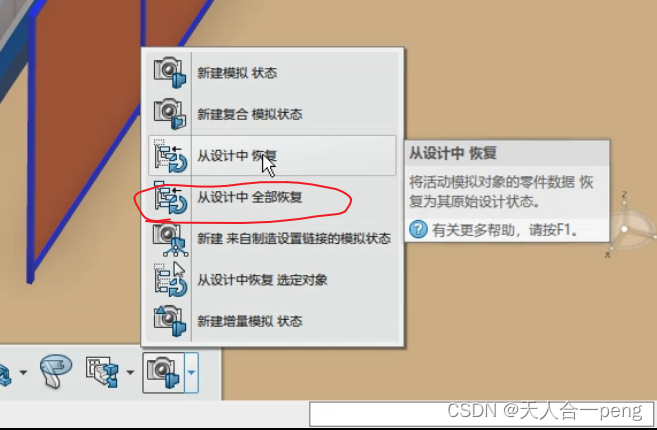
9 归零--双击父节点
10重新打开任务和教导















 730
730











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









