









原图


#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv.hpp>
using namespace cv;
using namespace std;
void OptimizeSeam(Mat& img1, Mat& trans, Mat& dst);
typedef struct
{
Point2f left_top;
Point2f left_bottom;
Point2f right_top;
Point2f right_bottom;
}four_corners_t;
four_corners_t corners;
void CalcCorners(const Mat& H, const Mat& src)
{
double v2[] = { 0, 0, 1 };//左上角
double v1[3];//变换后的坐标值
Mat V2 = Mat(3, 1, CV_64FC1, v2); //列向量
Mat V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
//左上角(0,0,1)
cout << "V2: " << V2 << endl;
cout << "V1: " << V1 << endl;
corners.left_top.x = v1[0] / v1[2];
corners.left_top.y = v1[1] / v1[2];
//左下角(0,src.rows,1)
v2[0] = 0;
v2[1] = src.rows;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.left_bottom.x = v1[0] / v1[2];
corners.left_bottom.y = v1[1] / v1[2];
//右上角(src.cols,0,1)
v2[0] = src.cols;
v2[1] = 0;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.right_top.x = v1[0] / v1[2];
corners.right_top.y = v1[1] / v1[2];
//右下角(src.cols,src.rows,1)
v2[0] = src.cols;
v2[1] = src.rows;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.right_bottom.x = v1[0] / v1[2];
corners.right_bottom.y = v1[1] / v1[2];
}
int main(int argc, char* argv[])
{
//Mat imageRight = imread("images/imgR.jpg", 1); //右图
//Mat imageLeft = imread("images/imgL.jpg", 1); //左图
//Mat imageRight = imread("images/SR.jpg", 1); //右图
//Mat imageLeft = imread("images/SL.jpg", 1); //左图
Mat imageRight = imread("images/flowerR.jpg", 1); //右图
Mat imageLeft = imread("images/flowerL.jpg", 1); //左图
//灰度图转换
Mat image_r, image_l;
cvtColor(imageRight, image_r, COLOR_BGR2GRAY);
cvtColor(imageLeft, image_l, COLOR_BGR2GRAY);
//直接从可能重复的区域提取特征点匹配 当前是左右图在拼接处大概有1/3是重复的
Rect rect_right = Rect(0, 0, imageRight.cols / 3, imageRight.rows);
Rect rect_left = Rect(2*imageLeft.cols/3, 0, (imageLeft.cols/3) -1 , imageLeft.rows);
Mat image_r_rect = imageRight(Rect(rect_right));
Mat image_l_rect = imageLeft(Rect(rect_left));
double start = getTickCount();
//提取特征点
Ptr<FeatureDetector> ORBDetector = ORB::create(10000);
vector<KeyPoint> keyPoints_r, keyPoints_l;
ORBDetector->detect(image_r_rect, keyPoints_r);
ORBDetector->detect(image_l_rect, keyPoints_l);
//特征点描述,为下边的特征点匹配做准备
Ptr<DescriptorExtractor> ORBDescriptor = ORB::create(10000);
Mat imageDesc_r, imageDesc_l;
ORBDescriptor->compute(image_r_rect, keyPoints_r, imageDesc_r);
ORBDescriptor->compute(image_l_rect, keyPoints_l, imageDesc_l);
flann::Index flannIndex(imageDesc_r, flann::LshIndexParams(12, 20, 2), cvflann::FLANN_DIST_HAMMING);
vector<DMatch> GoodMatchePoints;
Mat macthIndex(imageDesc_l.rows, 2, CV_32SC1), matchDistance(imageDesc_l.rows, 2, CV_32FC1);
flannIndex.knnSearch(imageDesc_l, macthIndex, matchDistance, 2, flann::SearchParams());
// Lowe's algorithm,获取优秀匹配点
for (int i = 0; i < matchDistance.rows; i++)
{
if (matchDistance.at<float>(i, 0) < 0.4 * matchDistance.at<float>(i, 1))
{
DMatch dmatches(i, macthIndex.at<int>(i, 0), matchDistance.at<float>(i, 0));
GoodMatchePoints.push_back(dmatches);
}
}
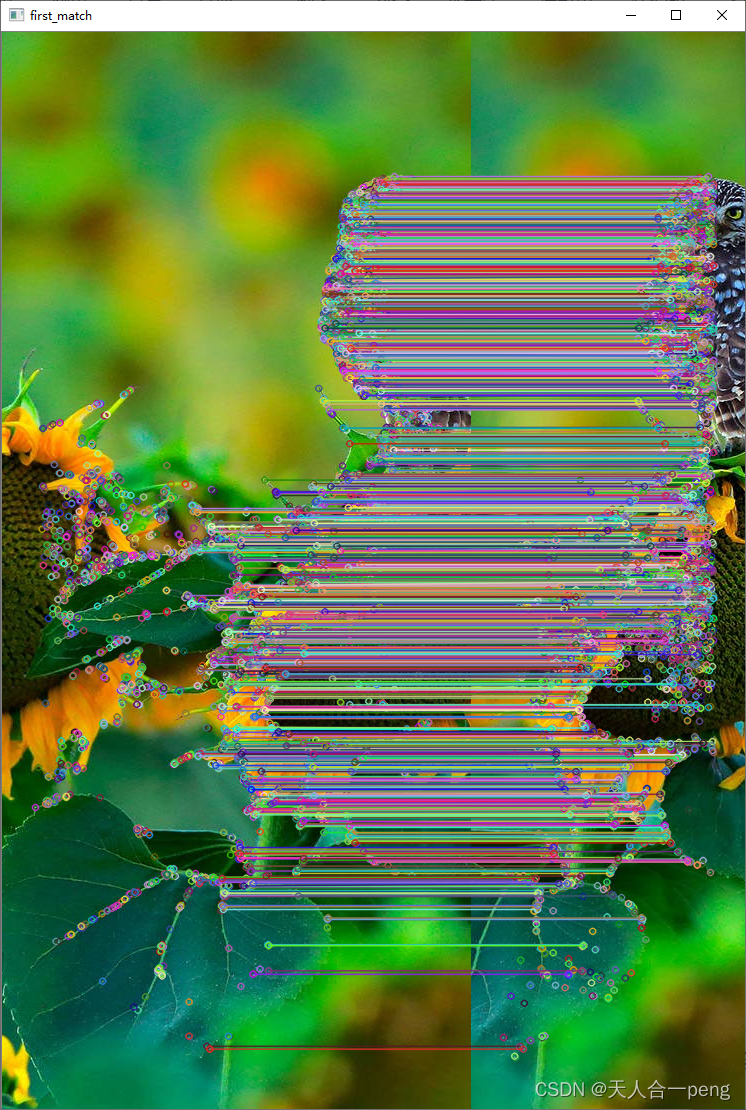
Mat first_match;
//drawMatches(imageLeft, keyPoints_l, imageRight, keyPoints_r, GoodMatchePoints, first_match);
drawMatches(image_l_rect, keyPoints_l, image_r_rect, keyPoints_r, GoodMatchePoints, first_match);
//namedWindow("first_match ", 2);
//imshow("first_match ", first_match);
//waitKey();
vector<Point2f> imagePoints1, imagePoints2;
for (int i = 0; i < GoodMatchePoints.size(); i++)
{
imagePoints2.push_back(keyPoints_l[GoodMatchePoints[i].queryIdx].pt);
imagePoints1.push_back(keyPoints_r[GoodMatchePoints[i].trainIdx].pt);
}
if (imagePoints1.size() <= 10 || imagePoints2.size() <= 10)
{
printf("There is little keypoints\n");
getchar();
}
//将左图的坐标转化到原图的位置,否则其变换矩阵在x方向的平稳不对
for (auto iter = imagePoints2.begin(); iter != imagePoints2.end(); iter++)
{
(*iter).x += 2 * imageLeft.cols / 3;
}
//获取图像1到图像2的投影映射矩阵 尺寸为3*3
Mat homo = findHomography(imagePoints1, imagePoints2, RANSAC);
// 也可以使用getPerspectiveTransform方法获得透视变换矩阵,不过要求只能有4个点,效果稍差
//Mat homo=getPerspectiveTransform(imagePoints1,imagePoints2);
cout << "变换矩阵为:\n" << homo << endl << endl; //输出映射矩阵
//计算配准图的四个顶点坐标
CalcCorners(homo, imageRight);
//cout << "left_top:" << corners.left_top << endl;
//cout << "left_bottom:" << corners.left_bottom << endl;
//cout << "right_top:" << corners.right_top << endl;
//cout << "right_bottom:" << corners.right_bottom << endl;
//图像配准
Mat imageTransform1, imageTransform2;
warpPerspective(imageRight, imageTransform1, homo, Size(MAX(corners.right_top.x, corners.right_bottom.x), imageLeft.rows));
rectangle(imageRight, Rect(imageRight.cols - MAX(corners.right_top.x, corners.right_bottom.x), 0, MAX(corners.right_top.x, corners.right_bottom.x), 500), (0, 0, 255));
imshow("rectangle", imageRight);
//imshow("透视矩阵变换Right", imageTransform1);
//imwrite("trans1.jpg", imageTransform1);
//waitKey();
//创建拼接后的图,需提前计算图的大小
int move_x = 900;
int dst_width = imageTransform1.cols; //取最右点的长度为拼接图的长度
int dst_height = imageLeft.rows;
Mat dst(dst_height, dst_width, CV_8UC3);
dst.setTo(0);
imageTransform1.copyTo(dst(Rect(0, 0, imageTransform1.cols, imageTransform1.rows)));
imshow("transform1", dst);
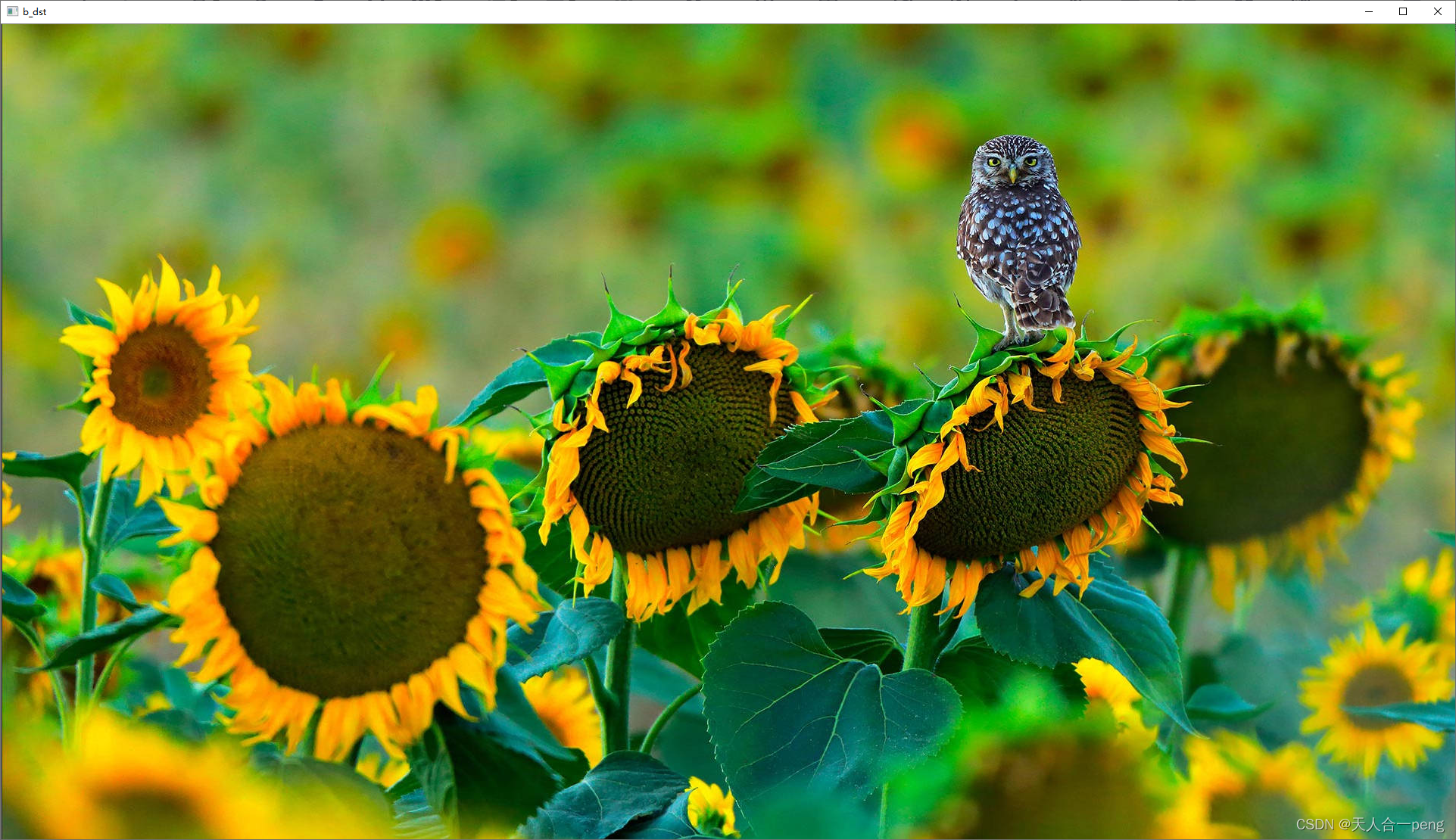
imageLeft.copyTo(dst(Rect(0, 0, imageLeft.cols, imageLeft.rows)));
imshow("b_dst", dst);
waitKey();
OptimizeSeam(imageLeft, imageTransform1, dst);
double end = getTickCount();
double useTime = (end - start) / getTickFrequency();
cout << "use-time : " << useTime << "s" << endl;
imshow("dstOptimize", dst);
//imwrite("dst.jpg", dst);
waitKey();
return 0;
}
//优化两图的连接处,使得拼接自然
void OptimizeSeam(Mat& img1, Mat& trans, Mat& dst)
{
int start = MIN(corners.left_top.x, corners.left_bottom.x);//开始位置,即重叠区域的左边界
double processWidth = img1.cols - start;//重叠区域的宽度
int rows = dst.rows;
int cols = img1.cols; //注意,是列数*通道数
double alpha = 1;//img1中像素的权重
for (int i = 0; i < rows; i++)
{
uchar* p = img1.ptr<uchar>(i); //获取第i行的首地址
uchar* t = trans.ptr<uchar>(i);
uchar* d = dst.ptr<uchar>(i);
for (int j = start; j < cols; j++)
{
//如果遇到图像trans中无像素的黑点,则完全拷贝img1中的数据
if (t[j * 3] == 0 && t[j * 3 + 1] == 0 && t[j * 3 + 2] == 0)
{
alpha = 1;
}
else
{
//img1中像素的权重,与当前处理点距重叠区域左边界的距离成正比,实验证明,这种方法确实好
alpha = (processWidth - (j - start)) / processWidth;
}
d[j * 3] = p[j * 3] * alpha + t[j * 3] * (1 - alpha);
d[j * 3 + 1] = p[j * 3 + 1] * alpha + t[j * 3 + 1] * (1 - alpha);
d[j * 3 + 2] = p[j * 3 + 2] * alpha + t[j * 3 + 2] * (1 - alpha);
}
}
}特征点匹配
拼接结果















 1096
1096











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









