






文献复现基于非线性模型预测控制NMPC的无人船,无人艇的轨迹跟踪控制和障碍物避碰
该算法包含Matlab编写的非线性模型预测控制Nonlinear model predictive control 的无人船轨迹跟踪和障碍物避碰算法trajectory tracking and collision avoidance ,有详细的注释和参考文献。
附使用说明。
ID:3729757389486719
石榴红的中棉as

标题:基于非线性模型预测控制的无人船轨迹跟踪和障碍物避碰算法
摘要:
本文介绍了一种基于非线性模型预测控制(NMPC)的无人船轨迹跟踪和障碍物避碰算法。该算法采用Matlab编写,具备详细的注释和参考文献。文章通过复现实验结果并给出使用说明,对算法进行了验证和评估。
引言:
随着无人船技术的快速发展和广泛应用,轨迹跟踪和障碍物避碰成为了无人船导航控制的重要问题。传统的控制算法往往无法满足无人船在复杂环境下的精确控制需求。而基于非线性模型预测控制的算法,通过对未来状态的预测和优化求解,能够有效解决这一问题。
方法:
本文提出的基于非线性模型预测控制的无人船轨迹跟踪和障碍物避碰算法,通过以下几个步骤实现:
-
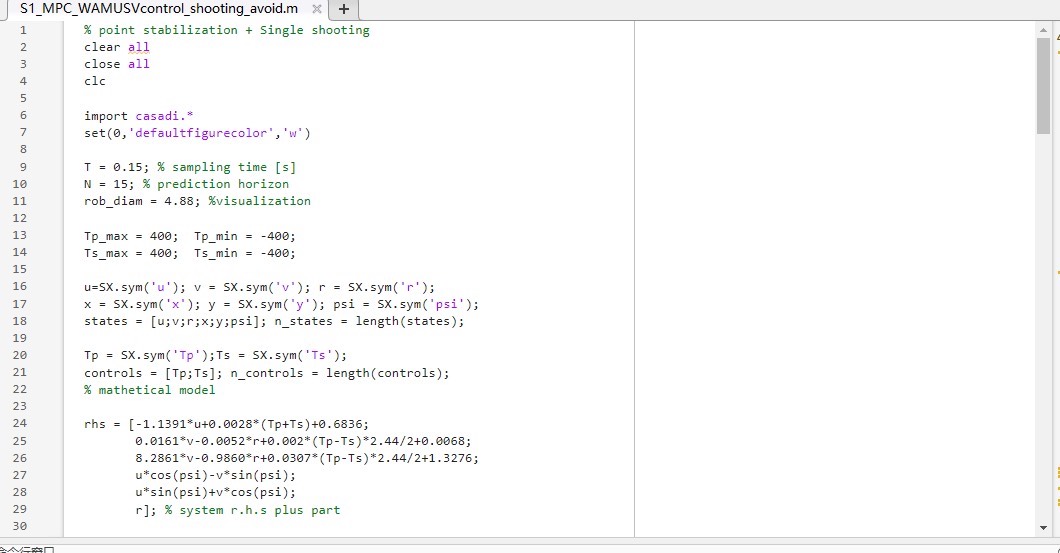
建立无人船的非线性动力学模型:根据船体运动学和动力学原理,建立无人船的状态方程和输出方程。通过将动力学方程进行线性化处理,得到线性近似模型。
-
设计无人船的轨迹跟踪控制器:利用NMPC方法,在每个采样时刻进行优化求解,以使得无人船的轨迹与期望轨迹尽可能接近。通过权衡控制目标与约束条件,确定最优控制输入。
-
引入障碍物避碰策略:在轨迹跟踪控制器的基础上,引入避碰策略。利用传感器获取障碍物的位置和速度信息,通过优化求解,调整船体的控制输入,以实现与障碍物的安全距离。
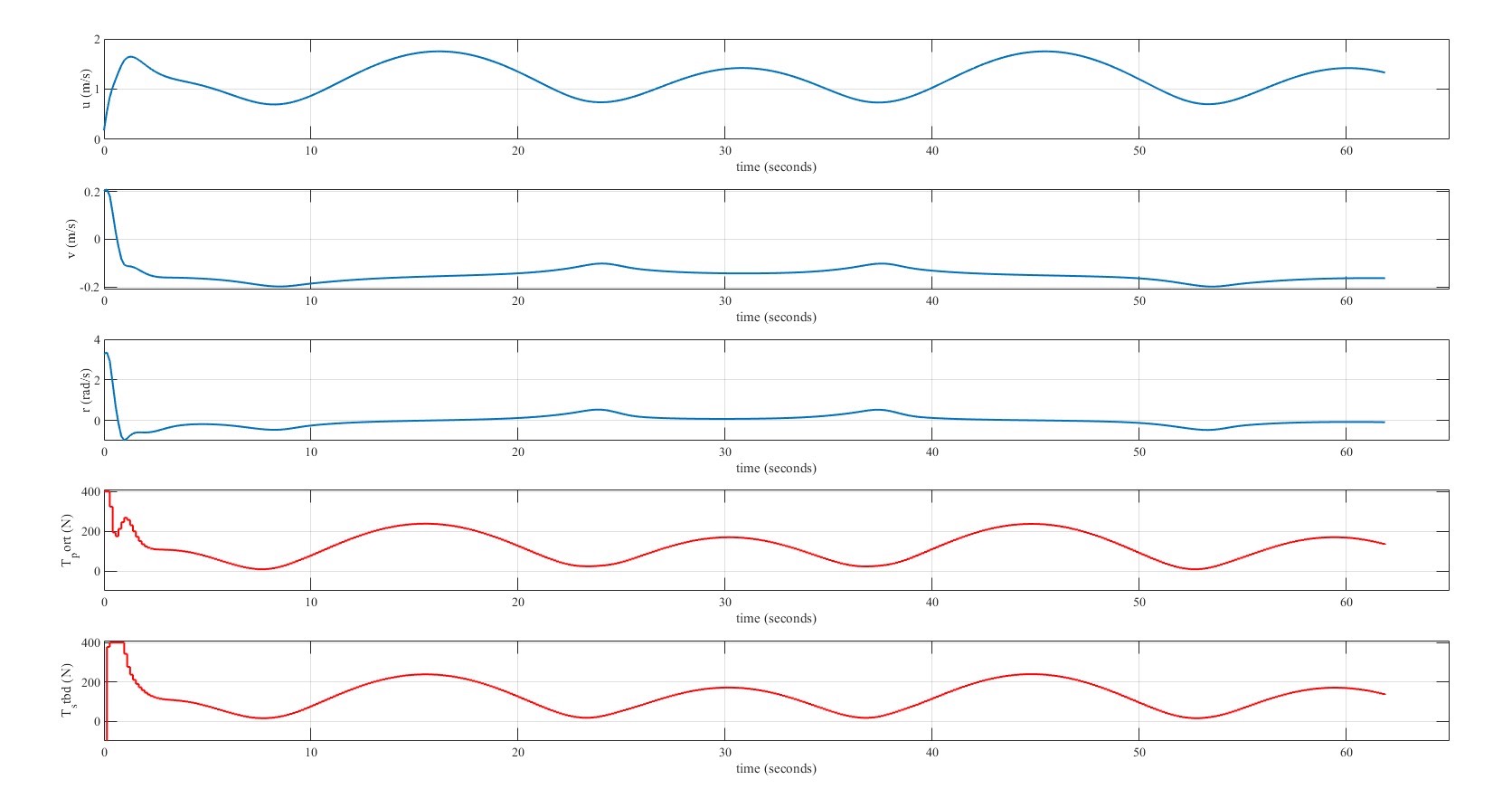
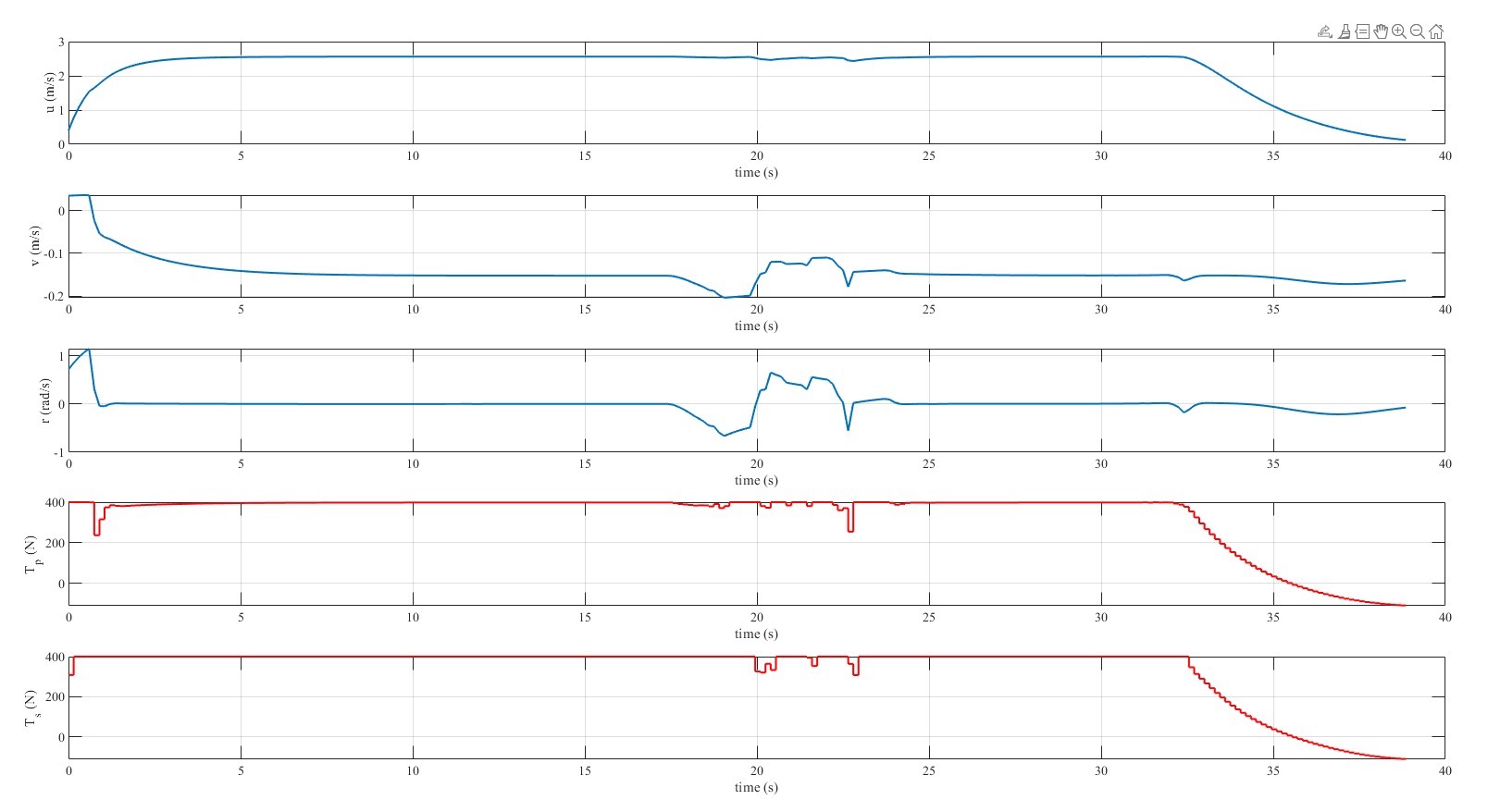
实验与结果:
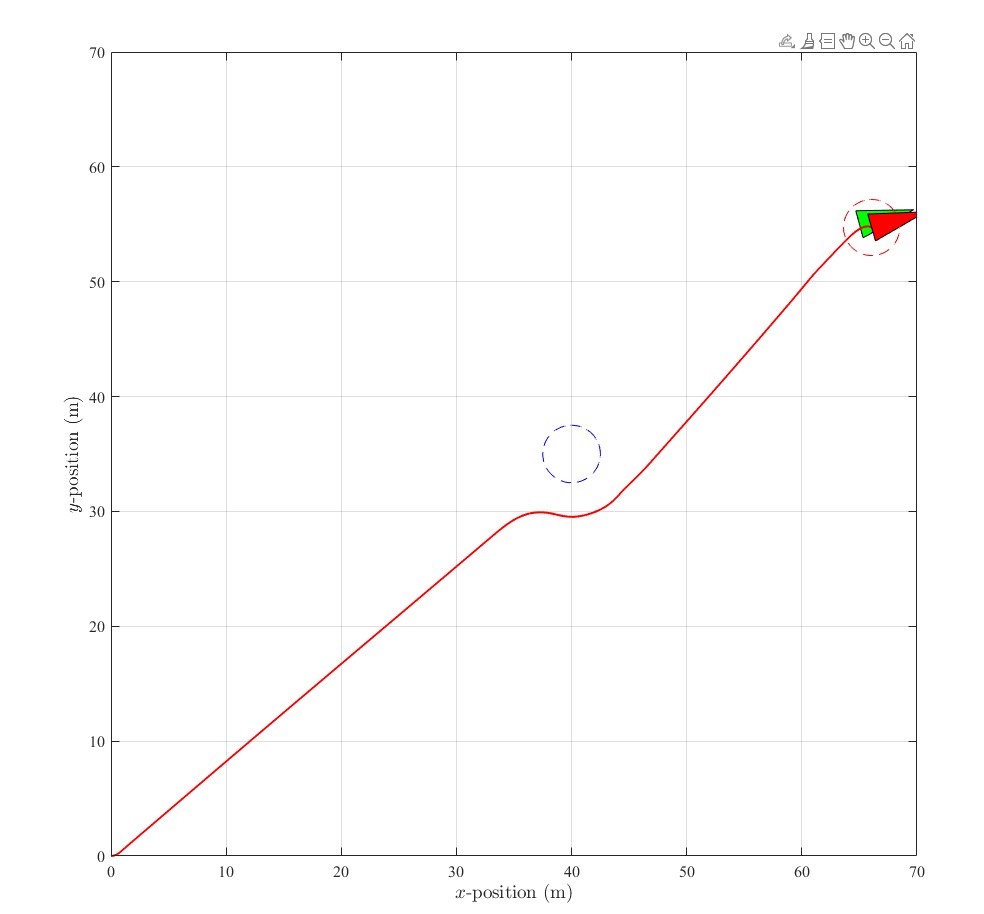
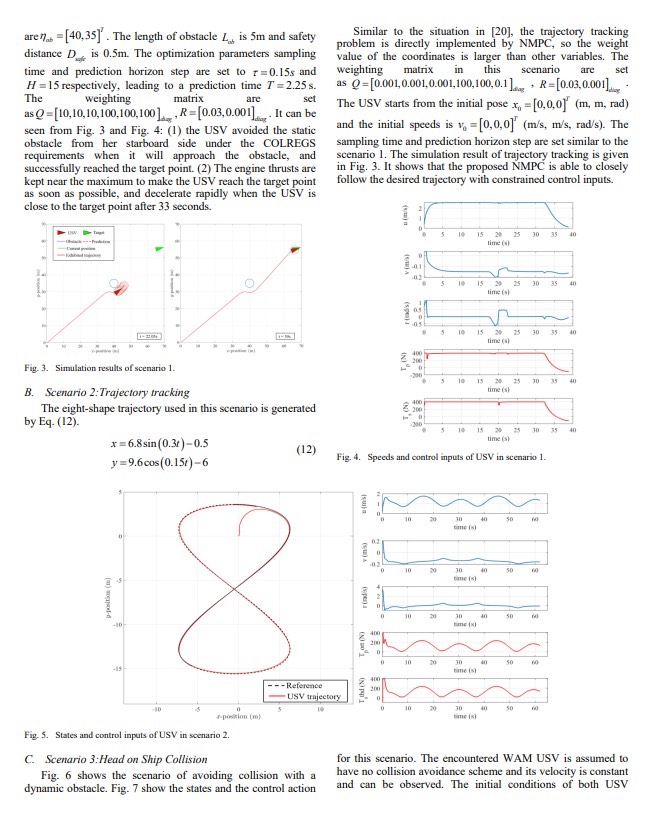
为了验证算法的有效性和性能,本文采用Matlab编程实现了基于NMPC的无人船轨迹跟踪和障碍物避碰算法。通过复现实验结果,并对算法进行评估和分析,验证了该算法在无人船导航控制中的优越性。
使用说明:
为了方便读者理解和应用该算法,本文给出了详细的使用说明。读者可以根据文中提供的代码和注释,将算法应用到实际无人船系统中,实现轨迹跟踪和障碍物避碰控制。
结论:
本文介绍了一种基于非线性模型预测控制的无人船轨迹跟踪和障碍物避碰算法。通过复现实验结果并给出使用说明,验证了该算法的有效性和可行性。该算法在无人船导航控制中具有重要的应用价值,能够实现精确的轨迹跟踪和安全的障碍物避碰。未来的研究可以进一步优化控制策略,提高算法的鲁棒性和性能。
以上相关代码,程序地址:http://fansik.cn/757389486719.html
















 1558
1558

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









