






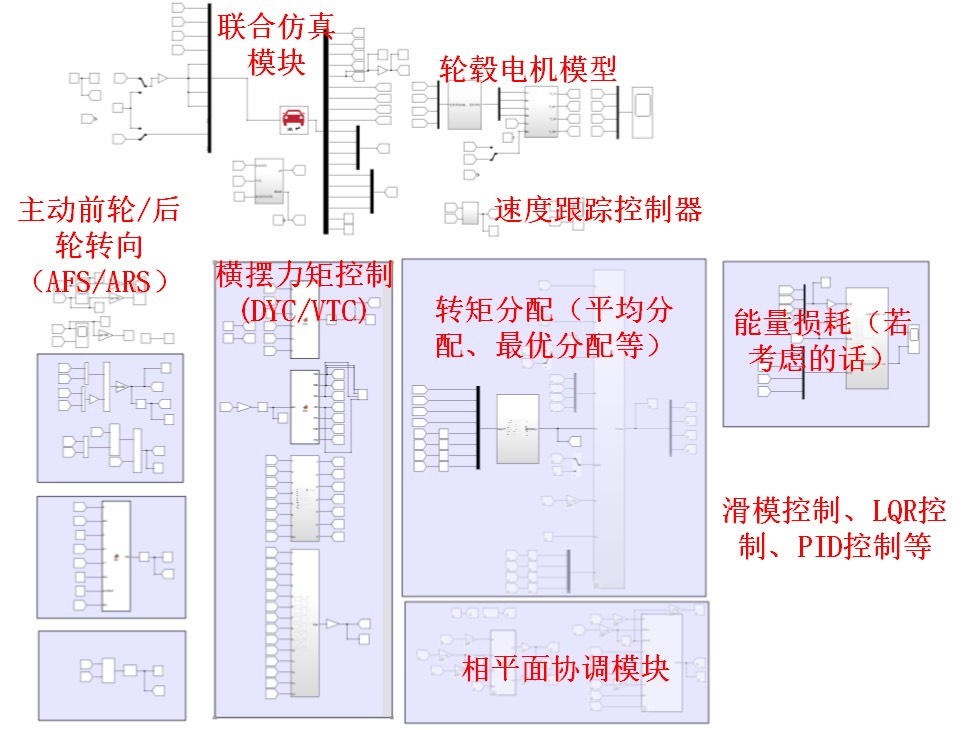
四轮轮毂电机驱动车辆AFS和DYC/VTC的联合仿真搭建、控制。
以四轮轮毂电机驱动车辆为控制对象,进行AFS/DYC的集成控制设计:
(1)DYC设计,整体采用分层控制策略。
其中顶层控制器的任务是利用车辆状态信息、横摆角速度以及质心侧偏角的误差计算出维持车辆稳定性的期望附加横摆力矩。
为了减少车辆速度影响,设计了纵向速度跟踪控制器;底层控制器的任务是对顶层控制器得到的期望附加横摆力矩以及驱动力进行分配,实现整车在高速地附着路面条件下的稳定性控制。
顶层控制器的控制方法包括:滑模控制(SMC)、LQR控制、PID控制、鲁棒控制、MPC控制等(发其中一个,默认发滑模和pid控制器)。
底层控制器的分配方法包括:平均分配、最优分配,可定制基于特殊目标函数优化的分配方法。
(2)AFS设计,根据横摆角速度和质心侧偏角的偏差计算出维持车辆稳定性所需的附加前轮转角。
控制方法:滑模控制、LQR控制、PID控制(发其中一个,默认发lqr控制器)。
最后根据相平面进行协调。
在稳定域中,单独使用AFS进行控制,改善车辆操纵稳定性,增强驾驶员的驾驶体验;在临界稳定域中,AFS和DYC同时进行控制,二者相互配合,协调进行,保证车辆稳定性的情况下改善操纵性能;在失稳状态下DYC单独控制,力求保证车辆稳定性和安全性。
说明:驾驶员模型采用CarSim自带的预瞄模型(Simulink驾驶员模型请单独购买);速度跟踪可加可不加,采用的是PID速度跟踪控制器;默认发(AFS/DYC)。
ID:14299757183747124
爱生气的二狗


四轮轮毂电机驱动车辆AFS和DYC VTC的联合仿真搭建、控制
随着汽车科技的不断发展,四轮轮毂电机驱动车辆成为了未来汽车行业的一项重要发展方向。对于这种新型驱动方式,如何进行有效的控制设计,提高车辆的稳定性和操纵性能,是一个亟待解决的问题。
本文将围绕四轮轮毂电机驱动车辆的控制对象展开讨论,重点集中在AFS(Active Front Steering,主动前轮转向系统)和DYC(Direct Yaw Moment Control,直接偏航力矩控制)的集成控制设计上。
首先,在整体控制策略上,我们采用了分层的方式来完成控制设计。顶层控制器的任务是根据车辆状态信息、横摆角速度以及质心侧偏角的误差,计算出维持车辆稳定性所需的期望附加横摆力矩。为了减少车辆速度的影响,我们设计了纵向速度跟踪控制器。底层控制器的任务则是根据顶层控制器计算得到的期望附加横摆力矩和驱动力,对其进行分配,以实现在高速地附着路面条件下的稳定性控制。
在顶层控制器的控制方法中,我们可以选择多种方法来实现,如滑模控制(SMC)、LQR控制、PID控制、鲁棒控制、MPC控制等。每种方法都有其独特的优势和适用场景。在本文中,我们默认选择了滑模控制和PID控制器这两种方法,并进行详细讨论和分析。
底层控制器中,我们需要选择一种合适的分配方法来实现控制目标。常用的分配方法有平均分配和最优分配两种,还可以根据特殊的目标函数进行定制化的优化分配。本文将重点讨论平均分配和最优分配这两种方法,分析它们的优缺点和适用场景。
在AFS的设计中,我们需要根据横摆角速度和质心侧偏角的偏差,计算出维持车辆稳定性所需的附加前轮转角。控制方法方面,我们可以选择滑模控制、LQR控制和PID控制等多种方法。在本文中,我们默认选择了LQR控制器,并详细介绍其原理和实现方式。同时,我们还将根据相平面进行协调,以保证控制的稳定性和有效性。
在具体的控制策略上,我们根据车辆的稳定域、临界稳定域和失稳状态,选择了不同的控制方法和模式。在稳定域中,我们单独使用AFS进行控制,以改善车辆的操纵稳定性,提升驾驶员的驾驶体验。在临界稳定域中,我们同时使用AFS和DYC进行控制,二者相互配合,协调工作,以保证车辆的稳定性并改善操纵性能。在失稳状态下,我们使用DYC进行单独控制,力求保证车辆的稳定性和安全性。
需要说明的是,本文所采用的驾驶员模型是CarSim自带的预瞄模型。至于速度跟踪方面,我们采用了PID速度跟踪控制器,并对其进行了详细说明。最后,默认发表的内容是关于AFS和DYC的控制设计。
通过对四轮轮毂电机驱动车辆AFS和DYC VTC的联合仿真搭建和控制的研究,我们可以更好地了解和掌握该驱动系统的工作原理和控制策略。同时,本文所提出的控制方法和设计思路,也为未来的汽车控制技术研究提供了一定的参考和借鉴。
总结起来,本文主要围绕四轮轮毂电机驱动车辆AFS和DYC VTC的联合仿真搭建和控制展开了论述。通过分层控制策略、不同的控制方法和分配方法的选择等,我们可以提高车辆的稳定性和操纵性能。本文逐步展开了顶层控制器和底层控制器的设计思路和实现方式,并对AFS和DYC的控制方法进行了讨论和分析。最后,通过对稳定域、临界稳定域和失稳状态下的控制策略的选择和应用,我们可以有效地提升驾驶员的驾驶体验和车辆的安全性。
通过本文的研究和探讨,相信能够为四轮轮毂电机驱动车辆的控制设计提供一定的指导和参考,为未来汽车行业的发展做出贡献。同时,我们也希望能够通过本文的发表,与广大的程序员和技术爱好者分享我们的研究成果和思考,推动技术的进步和创新。
以上相关代码,程序地址:http://fansik.cn/757183747124.html
















 856
856

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









