








 超级会员免费看
超级会员免费看


论文地址:https://arxiv.org/pdf/2502.19694v1
1. 研究背景与问题
- BEV表示的重要性:鸟瞰图(BEV)是自动驾驶感知任务的核心,提供场景的全局视角,但存在固有噪声问题。噪声来源包括传感器(相机、LiDAR)缺陷和学习过程的局限性,导致下游任务(如3D目标检测)性能下降。
- 现有方法的不足:当前BEV生成方法(如BEVFormer、BEVFusion)未充分解决噪声问题;现有扩散模型增强方法(如DiffBEV、Dif-FUSER)依赖噪声信息作为条件,且推理时需多次迭代,计算开销大。
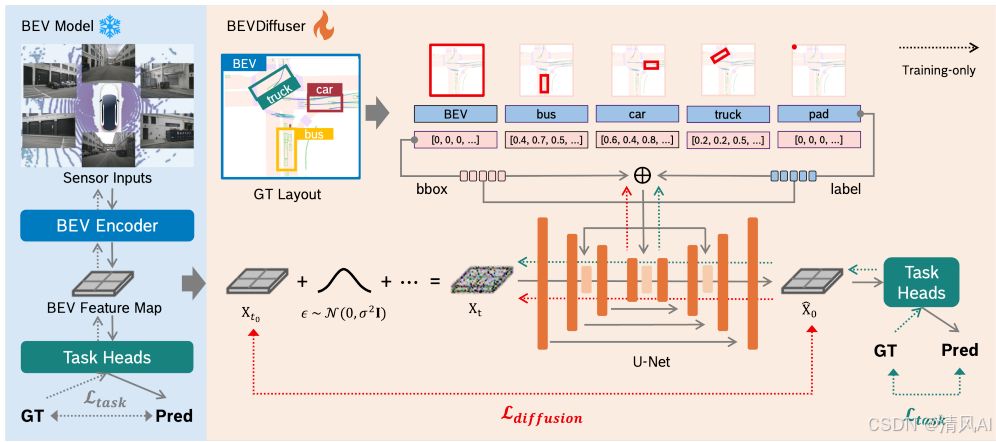
2. 方法创新:BEVDiffuser
核心设计
- 条件扩散模型:以真实物体布局(ground-truth object layout)为条件引导去噪过程。布局定义为 l={o0,o1,.

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 253
253

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











