







一、磁链观测器基础
1.1 什么是磁链
磁链(magnetic linkage)是电磁学中的一个重要概念,指导电线圈或电流回路所链环的磁通量。单位为韦伯(Wb),又称磁通匝。
公式为:
= 线圈匝数
= 穿过单匝数的平均磁通量的乘积
反电动势和磁链的公式:
反电动势
= 磁链的微分
我们可知,磁链的微分就是负的反电动势,反电动势的积分就是负的磁链。
1.2 电机电压磁链方程
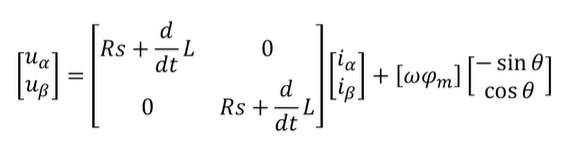
、
= 两轴的定子电压
、
= 两轴的定子电流
= 定子电阻
= 转子电角速度
= 转子位置角
= 磁链值
二、磁链观测器公式推导
由电机电压磁链方程移项后可得:
 、
、
=
的导数
我们先定义 和
,在这里
不包括未知量,可以作为一个已知量:
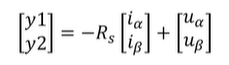
2.1 构造状态空间变量 X
此时移项后定义状态变量 和
:

对 和
求积分得:
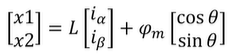
其原理是求导公式,所以 和
求积分后消去了
:
2.2 构造空间向量 eta(x)
此时可以定义空间向量 ,他最终可以描述出当前转子角度:

2.3 构造非线性磁链观测器
观测器模型:

根据此模板构造磁链观测器:

和
为估计的 x 导数
此观测器在下条件中收敛:
![]()
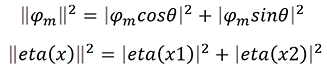
2.3.1 观测器的欧几里得范数
欧式范数也称之为欧式距离,||x|| 表示向量的长度计算方法依然是向量各个元素模的平方之和再开方。
根据欧式范数,所以下列公式相等,我们才能构造之前的磁链观测器:
三、磁链观测器的离散化
我们上面得到了一个磁链观测器的基本方程:
但是此观测器不能直接变成与代码,需要加入周期时间这一变量:
再根据此对观测器进行向后一阶差分,也就是离散化可得:

根据之前的 x 公式:
我们移项后可得估算的角度:


















 2130
2130

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









