







paper:GhostNets on Heterogeneous Devices via Cheap Operations
code:https://github.com/huawei-noah/Efficient-AI-Backbones/blob/master/g_ghost_pytorch/g_ghost_regnet.py
前言
本文提出了两种轻量网路,用于CPU端的C-GhostNet和用于GPU端的G-GhostNet。前者就是20年的原版GhostNet,这里只是换了个名字,具体可见GhostNet(CVPR 2020) 原理与代码解析,这里不再详细介绍。本文主要介绍新提出的基于GPU端的G-GhostNet。
存在的问题
之前的轻量型骨干网络大都以降低模型FLOPs为准则专门为CPU设计的,但由于CPU和GPU的硬件架构存在明显的差异,一些FLOPs较小的操作(特别是depth-wise convolution和channel shuffle)在GPU上并不是那么高效。实际上这些操作通常具有较低的arithemetic intensity,即计算和内存操作的比值,无法充分利用GPU的并行计算能力。
本文的创新点
在许多CNN骨干网络的架构中,一个stage通常包含多个卷积层或block,C-GhostNet研究的是一个卷积层生成的特征图中通道信息的冗余,而G-GhostNet研究的是多个block之间的特征相似性和冗余,并通过观察发现跨block的特征冗余是存在的,提出了G-Ghost stage,一个stage的最终输出一部分是和原来一样经过多个block得到的,另一部分通过廉价操作得到,最终将两部分拼接得到输出,大大降低了计算成本。
方法介绍
低FLOPs的操作比如深度可分离卷积在GPU上不那么高效,Radosavovic等人提出用激活activation来衡量网络的复杂度,在GPU上相比于FLOPs延迟和激活的相关性更大,也就是说,如果我们可以删去部分特征图减少激活大概率就能降低网络的延迟。通常一个CNN网络由多个stage构成,每个stage又包含多个block,本文旨在减少stage中的特征冗余大大减少中间特征,从而降低计算成本和内存使用。
对于CNN中的某个stage,有 \(n\) 层比如AlexNet或 \(n\) 个block表示为 \(\left \{ L_{1},L_{2},...,L_{n} \right \} \),对于输入 \(X\) 第一个block和最后一个block的输出为

要获得最终的输出 \(Y_{n}\),输入需要经过多个block的处理,这需要大量的计算。下图是ResNet34的第三个stage中第一个block和最后一个block的输出特征图,尽管最后一个block的输出经过了前5个block的处理,其中有些特征与第一个block的输出仍然非常相似,这意味着这些特征可以通过对低级特征的简单转换来得到。

作者将深层特征分为comlicated特征和ghost特征,前者仍然通过多个block来生成,后者可以通过对浅层特征的简单转换来得到。对于一个有 \(n\) 个block的stage,其输出为 \(X\in \mathbb{R}^{c\times h\times w}\),我们将复杂特征表示为 \(Y^{c}_{n}\in \mathbb{R}^{(1-\lambda)c\times h\times w}\),ghost特征表示为 \(Y^{c}_{g}\in \mathbb{R}^{\lambda c\times h\times w}\),其中 \(0\le \lambda \le 1\)。复杂特征通过 \(n\) 个block得到

其中 \(L'_{2},...,L'_{n}\) 是相比于式(7)宽度为 \((1-\lambda)\times width\) 的thin block。\(Y^{g}_{n}\) 可以通过对 \(Y_{1}\) 的廉价操作 \(C\) 得到

其中廉价操作 \(C\) 可以是1x1或3x3卷积。将 \(Y^{c}_{n}\) 和 \(Y^{g}_{n}\) 拼接起来就得到了最终输出

Intrinsic Feature Aggregation
尽管简单特征可以通过廉价操作近似得到,但式(9)中的 \(Y^{g}_{n}\) 可能缺乏需要多层才能提取到的深层信息,为了弥补缺乏的信息,作者提出用complicated分支的中间特征来提高廉价操作的表示能力。首先提取复杂分支的中间特征 \(Z\in \mathbb{R}^{c'\times h\times w}=[Y^{c}_{2},Y^{c}_{3},...,Y^{c}_{n}]\) 将其按通道concat起来,其中 \(c'\) 是通道总数,如下图所示

通过转换函数 \(\tau \) 对 \(Z\) 进行变换,然后与 \(Y^{g}_{n}\) 进行融合。

转换函数 \(\tau\) 包括一个全局平均池化和一个全连接层

其中 \(W\in \mathbb{R}^{c'\times \lambda c}\),\(b\in \mathbb{R}^{\lambda c}\) 分别是权重和偏置。
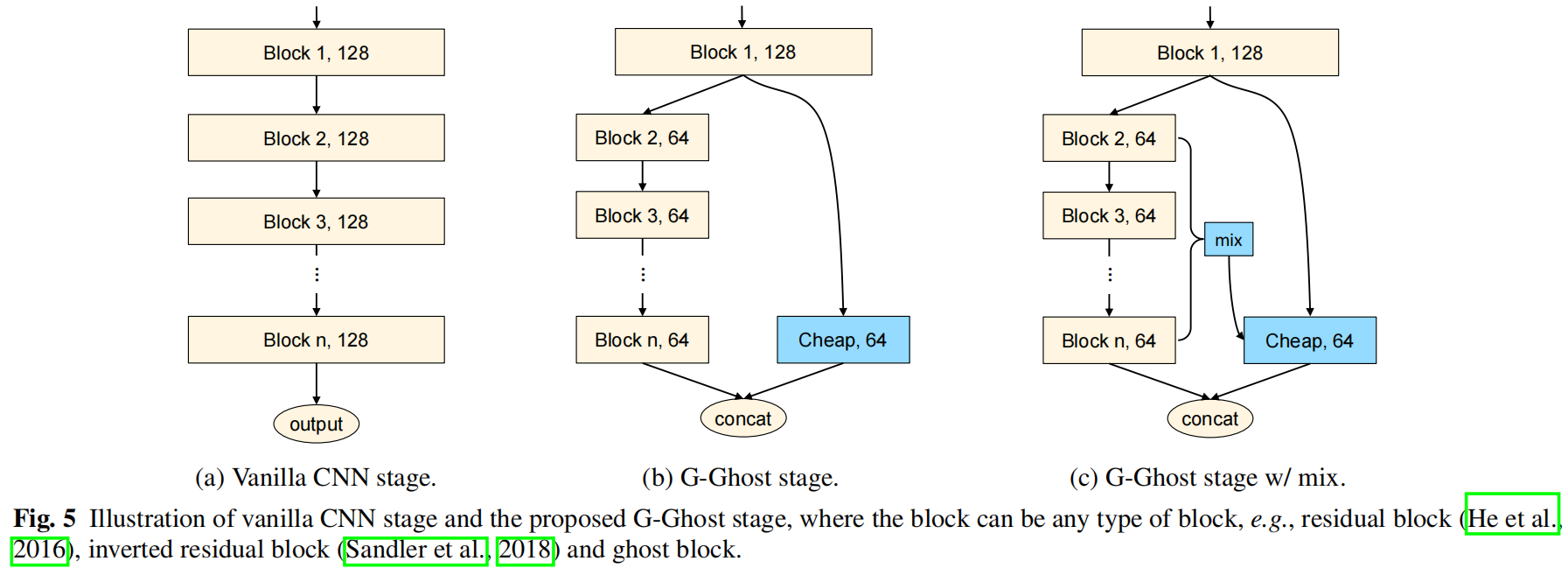
下图分别是原始的CNN结构、没有特征聚合的G-Ghost stage和有特征聚合的G-Ghost stage
代码解析
下面是G-Ghost stage的官方实现,好像和文章中的描述有些出入。forward函数中首先self.base就是上图中的Block 1,出入一是文中Block 1的输出好像是完整的分别进入complicated分支和cheap分支,而实现中是将Block 1的输出按 \(\lambda\) 沿通道分为两部分分别进入两个分支。出入二是从上图可以看出是对Block 2 - Block n进行特征聚合,而实现中还包括Block 1,即代码中的x0。self.merge是转换函数 \(\tau\),其中全连接层用卷积层实现。
class Stage(nn.Module):
def __init__(self, block, inplanes, planes, group_width, blocks, stride=1, dilate=False, cheap_ratio=0.5):
super(Stage, self).__init__()
norm_layer = nn.BatchNorm2d
downsample = None
self.dilation = 1
previous_dilation = self.dilation
if dilate:
self.dilation *= stride
stride = 1
if stride != 1 or self.inplanes != planes:
downsample = nn.Sequential(
conv1x1(inplanes, planes, stride),
norm_layer(planes),
)
self.base = block(inplanes, planes, stride, downsample, group_width,
previous_dilation, norm_layer)
self.end = block(planes, planes, group_width=group_width,
dilation=self.dilation,
norm_layer=norm_layer)
group_width = int(group_width * 0.75)
raw_planes = int(planes * (1 - cheap_ratio) / group_width) * group_width
cheap_planes = planes - raw_planes
self.cheap_planes = cheap_planes
self.raw_planes = raw_planes
self.merge = nn.Sequential(
nn.AdaptiveAvgPool2d(1),
nn.Conv2d(planes + raw_planes * (blocks - 2), cheap_planes,
kernel_size=1, stride=1, bias=False),
nn.BatchNorm2d(cheap_planes),
nn.ReLU(inplace=True),
nn.Conv2d(cheap_planes, cheap_planes, kernel_size=1, bias=False),
nn.BatchNorm2d(cheap_planes),
)
self.cheap = nn.Sequential(
nn.Conv2d(cheap_planes, cheap_planes,
kernel_size=1, stride=1, bias=False),
nn.BatchNorm2d(cheap_planes),
)
self.cheap_relu = nn.ReLU(inplace=True)
layers = []
downsample = nn.Sequential(
LambdaLayer(lambda x: x[:, :raw_planes])
)
layers = []
layers.append(block(raw_planes, raw_planes, 1, downsample, group_width,
self.dilation, norm_layer))
inplanes = raw_planes
for _ in range(2, blocks - 1):
layers.append(block(inplanes, raw_planes, group_width=group_width,
dilation=self.dilation,
norm_layer=norm_layer))
self.layers = nn.Sequential(*layers)
def forward(self, input):
x0 = self.base(input)
m_list = [x0]
e = x0[:, :self.raw_planes]
for l in self.layers:
e = l(e)
m_list.append(e)
m = torch.cat(m_list, 1)
m = self.merge(m)
c = x0[:, self.raw_planes:]
c = self.cheap_relu(self.cheap(c) + m)
x = torch.cat((e, c), 1)
x = self.end(x)
return x















 476
476











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











