






文章目录
伺服的基础知识及简单应用
伺服基础知识
https://www.bilibili.com/video/BV1TU4y1f7B6/?spm_id_from=333.788&vd_source=04d791790ccb453dc9e7113022339213
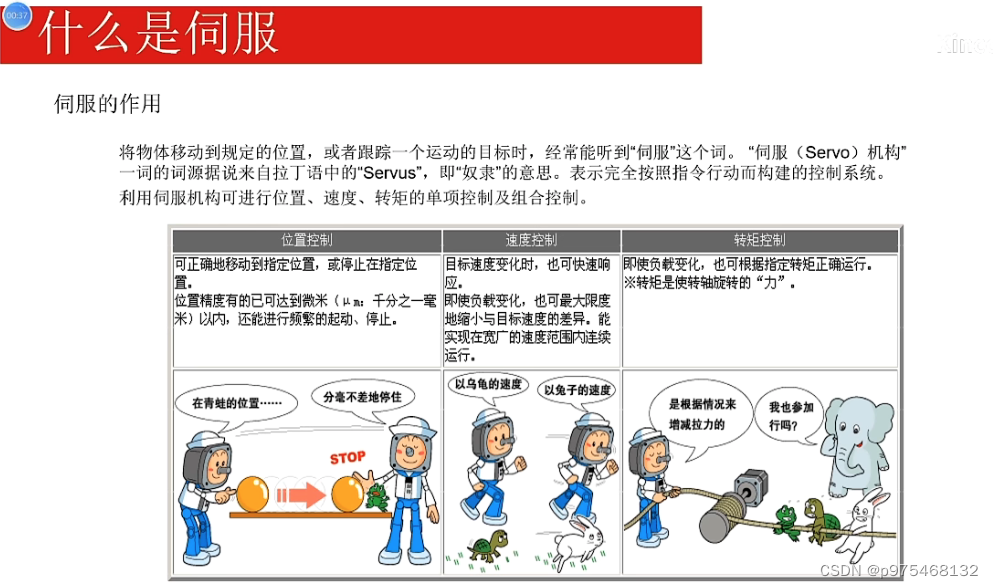
什么是伺服
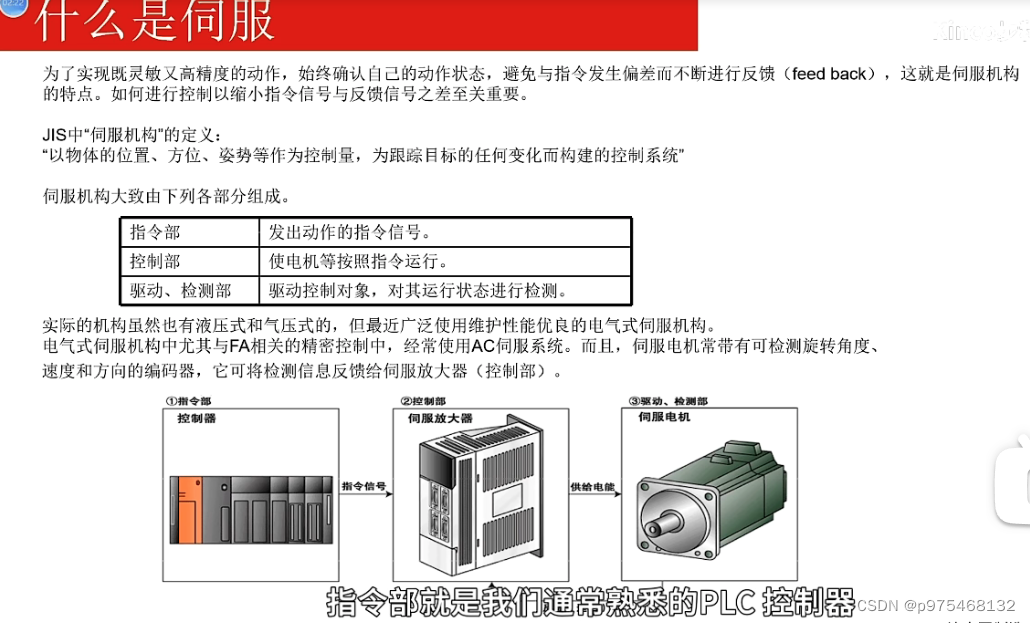
指令部就是我们通常熟悉的PLC控制器,他发出指令给伺服驱动器,伺服驱动器接收到控制指令后再来控制伺服电机运转,伺服电机后面的编码器才把伺服的速度和位置信号反馈给伺服驱动器,这样就组成了一个完整的伺服控制系统。
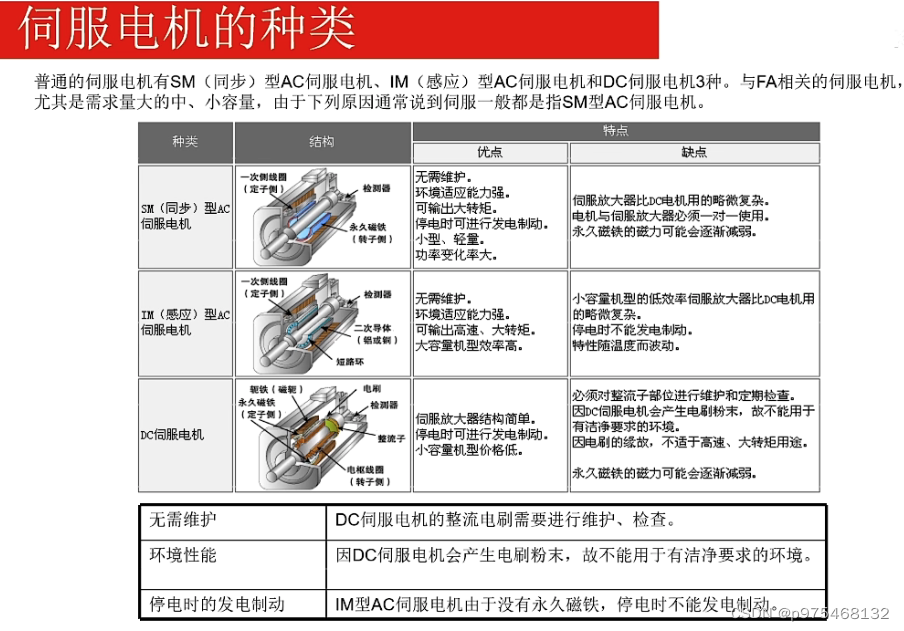
伺服电机的种类
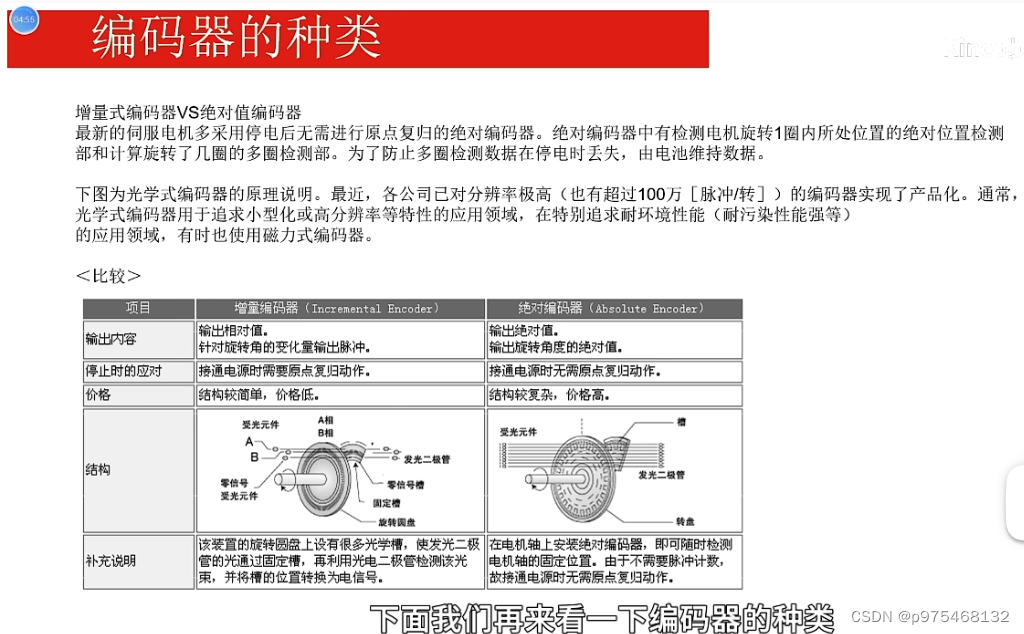
编码器种类
伺服的原理和构成

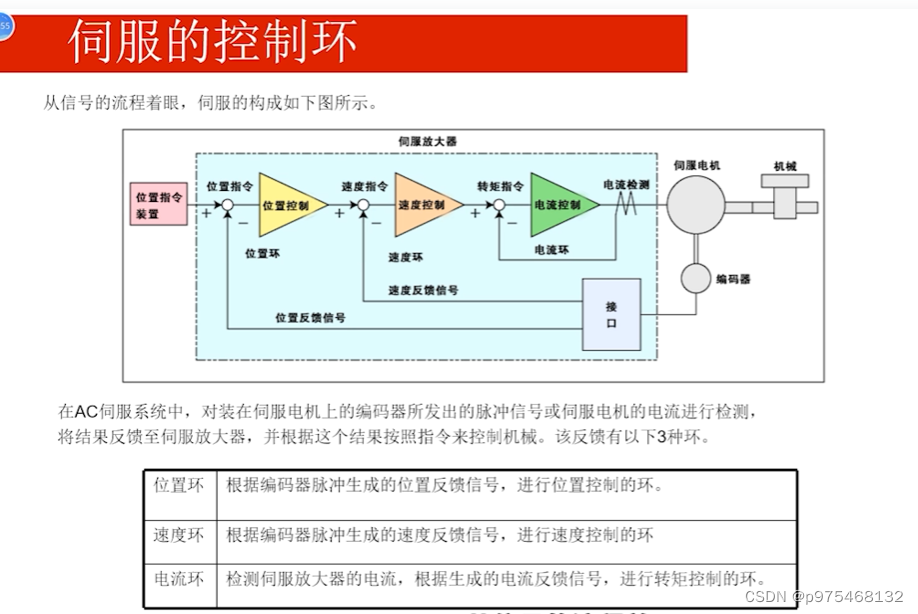
编码器可以把电机的当前位置和当前速度反馈给驱动器,然后驱动器再根据接收到的目标指令与当前值做比较,从而产生一个偏差,这个偏差值经过PID运算,最后产生一个控制伺服电机的一个控制量,使得当前值和指定值之间的偏差越来越小,直到二者相等。
伺服的控制环
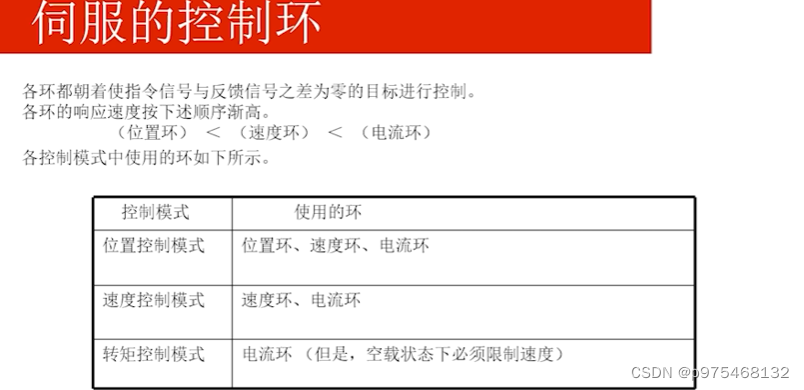
速度控制模式有立即速度和带加减速控制的这种模式,立即速度时不带加减速,他只有速度环和电流环,带加减速的速度模式他就有位置环、速度环和电流环。



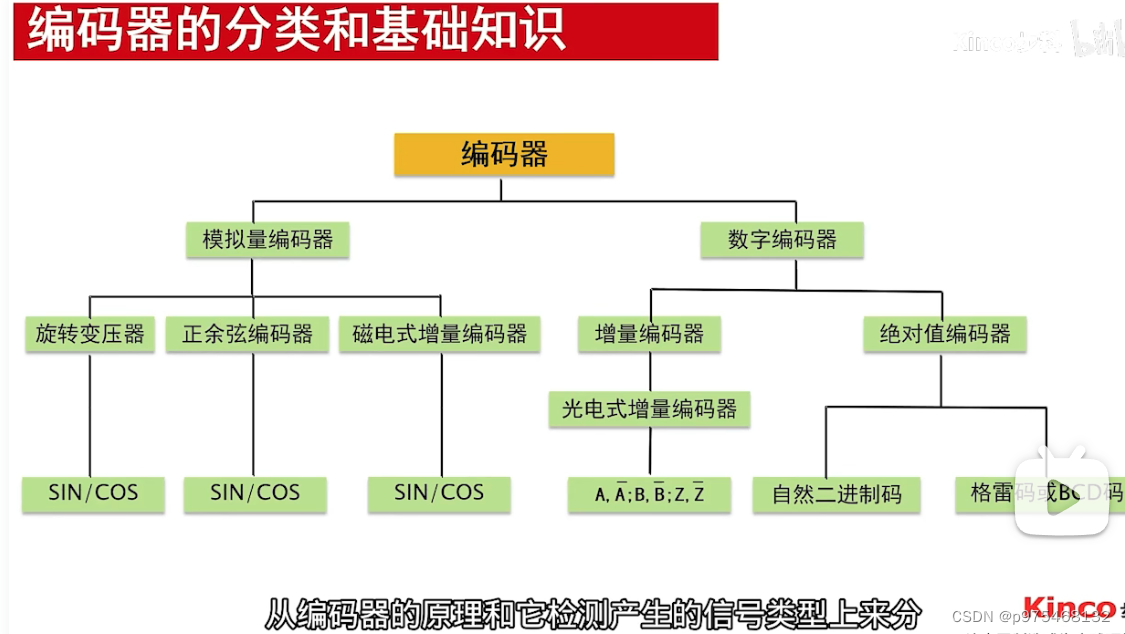
编码器的基础知识
编码器的分类及工作原理
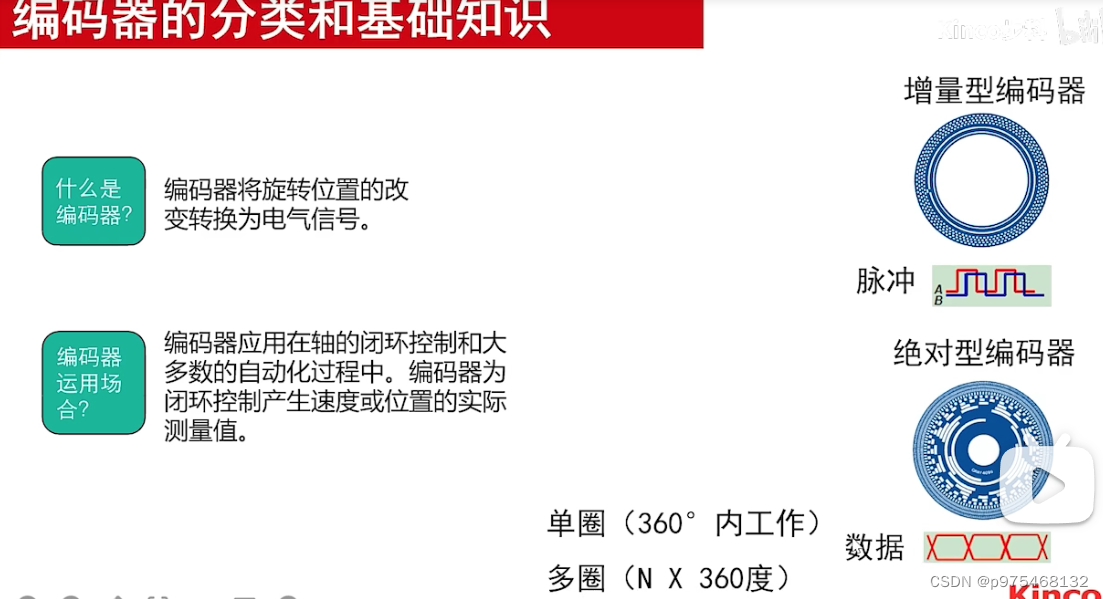
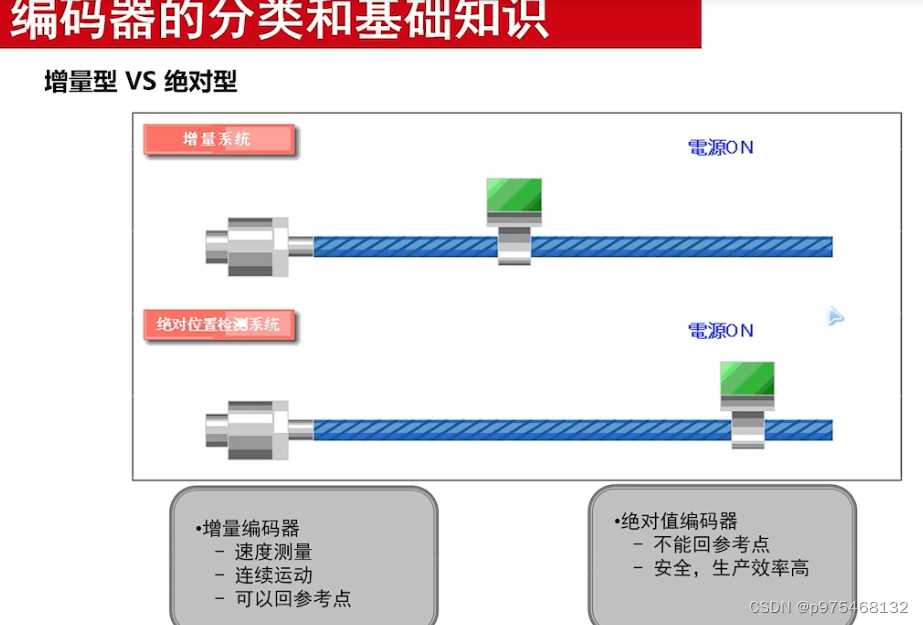
增量型的编码器在断电后要复位在工作,绝对型可以继续工作。
光电增量式编码器
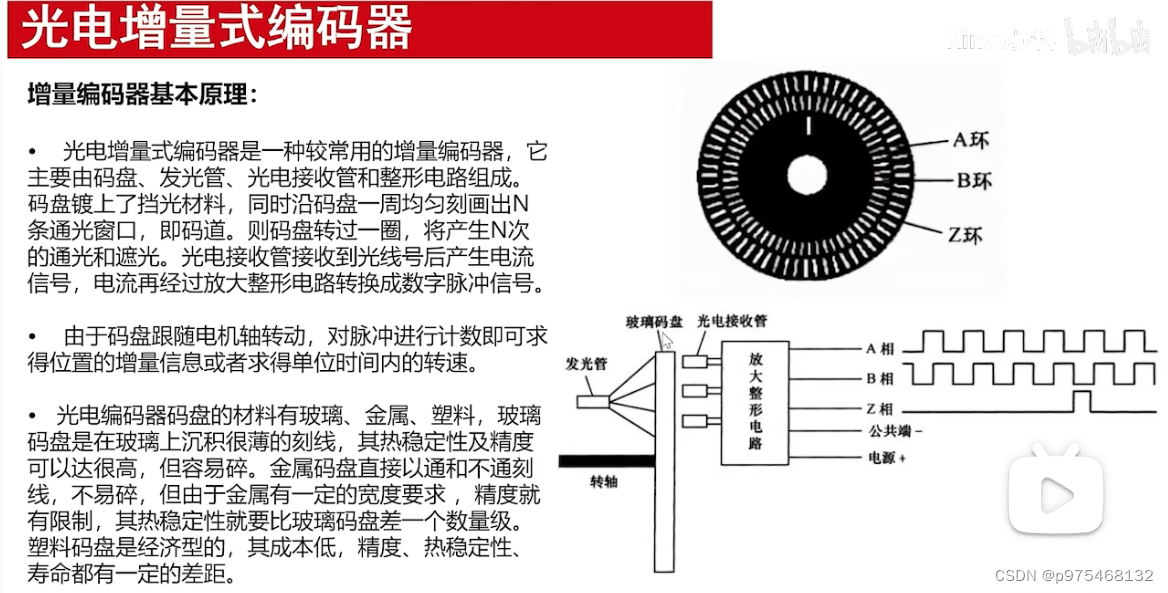

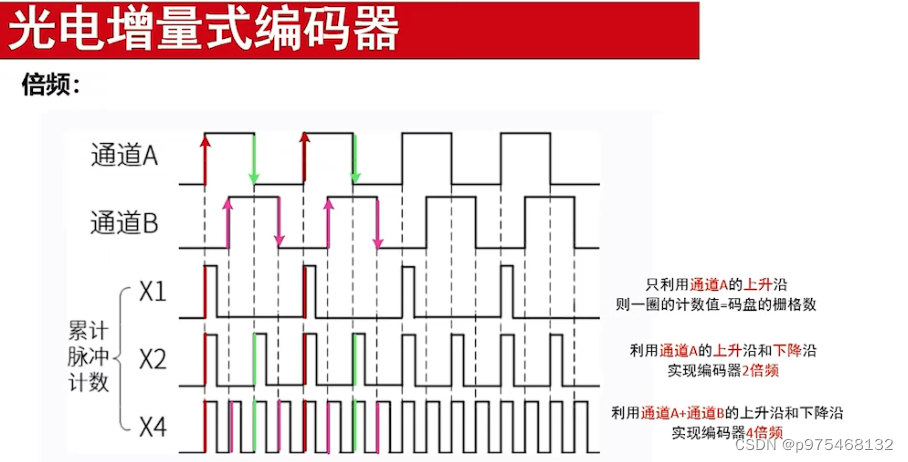
同时,增量编码器,他还有一个倍频的技术,比如说我们常见的2500线的编码器,如果四倍频以后,那么就可以得到2500*4=10000的分辨率,2500线指我们在码盘上刻得这个码道有2500个。
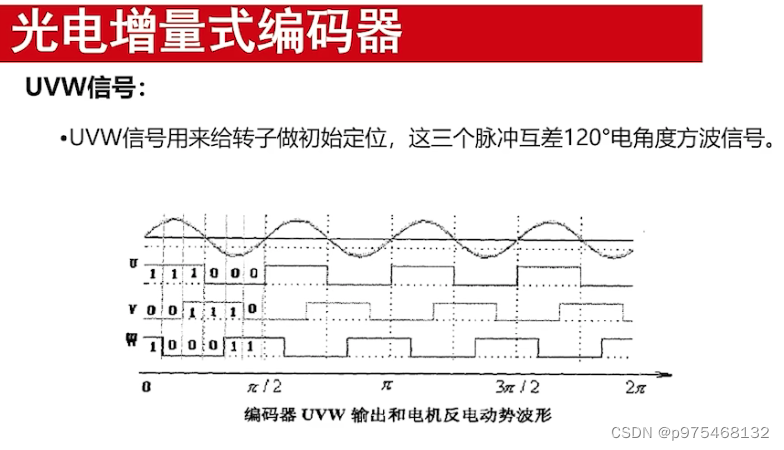
同时编码器还带有UVW信号,UVW信号用来给转子做初始定位,这三个脉冲相互之间相差120度。我们现在常用的伺服电机都是交流永磁伺服电机,他的转子是永磁体,那么我们上电时需要知道转子的磁极的一个具体位置,就可以用UVW来知道这个位置。图里面第一行是电机反向电动势的正弦波形,它的一个周期表示伺服电机转子转动一个磁极周期,比如说我从一个N极转到下一个N极,就会有一个完整的正弦波。在一个周期内,UVW信号一共分为六个位置,通过这个方法知道转子的一个具体位置。
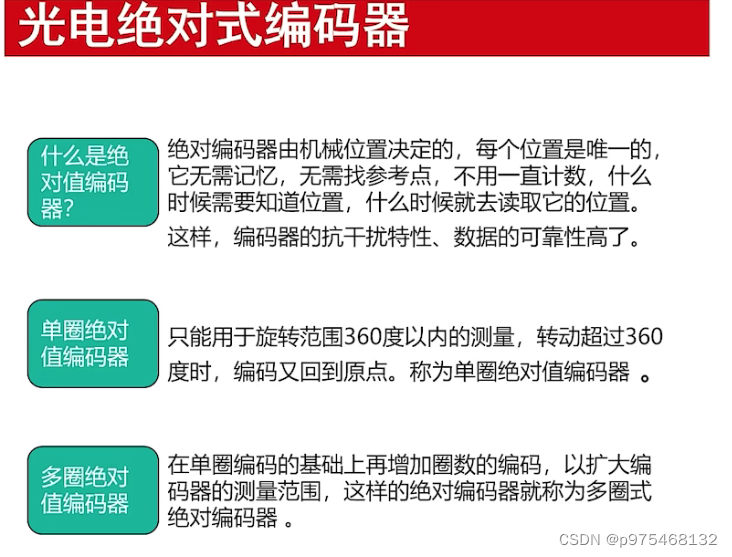
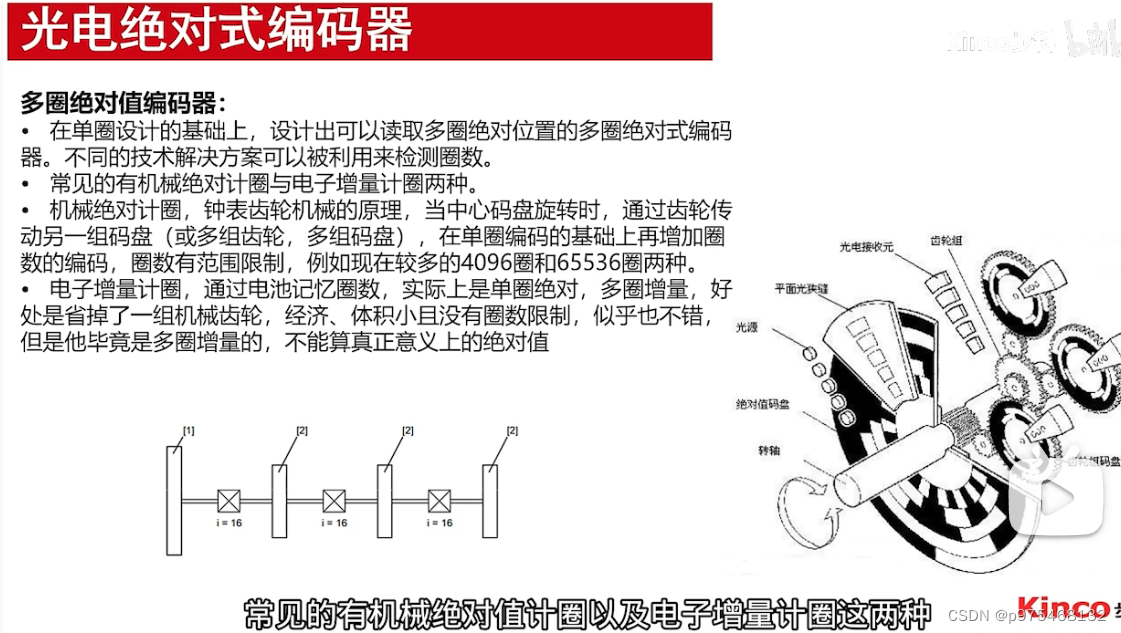
光电绝对式编码器
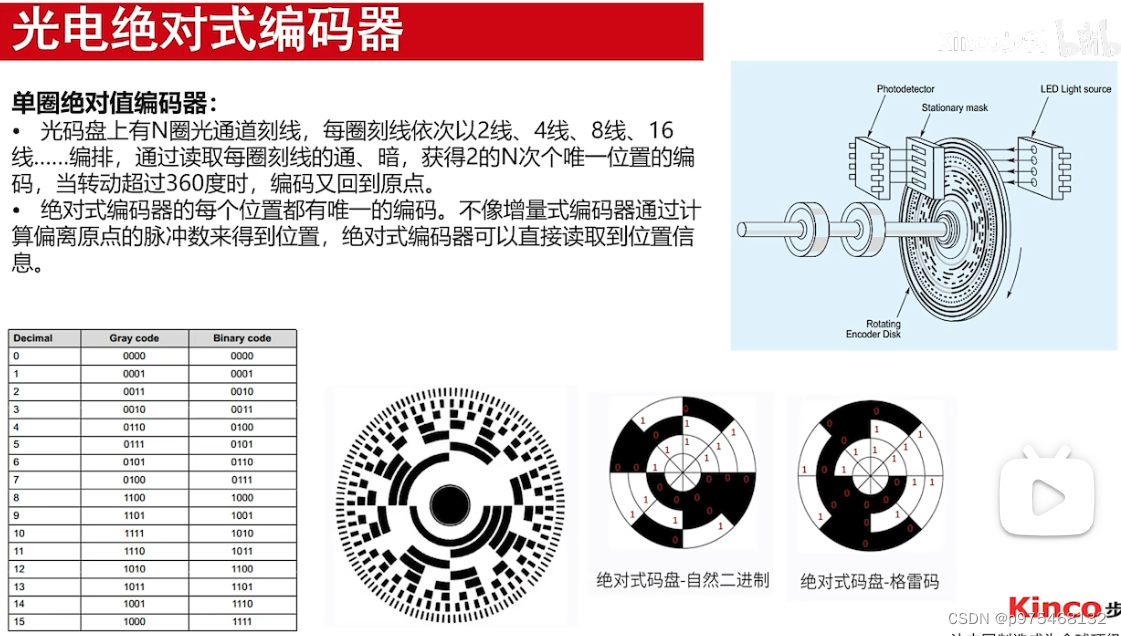
格雷码的特点是他的相邻的两个位置,他的数据只有一个是不同的,通过这种方式,我们可以做一些位置的校验,在一些有干扰的情况下,可以更准确的判断位置。
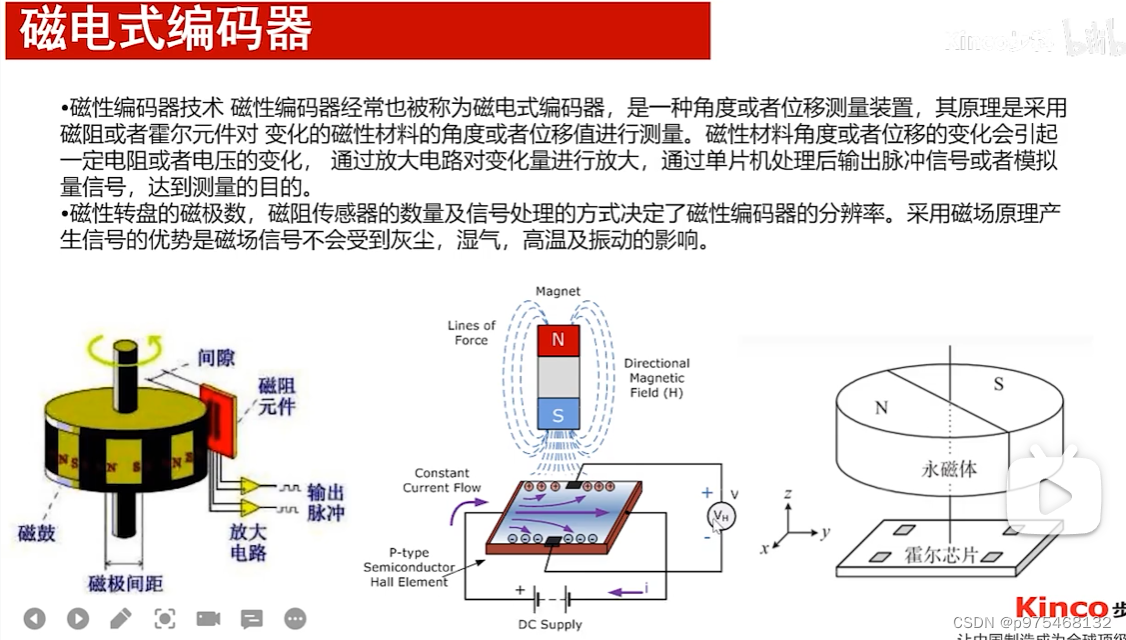
磁电式编码器
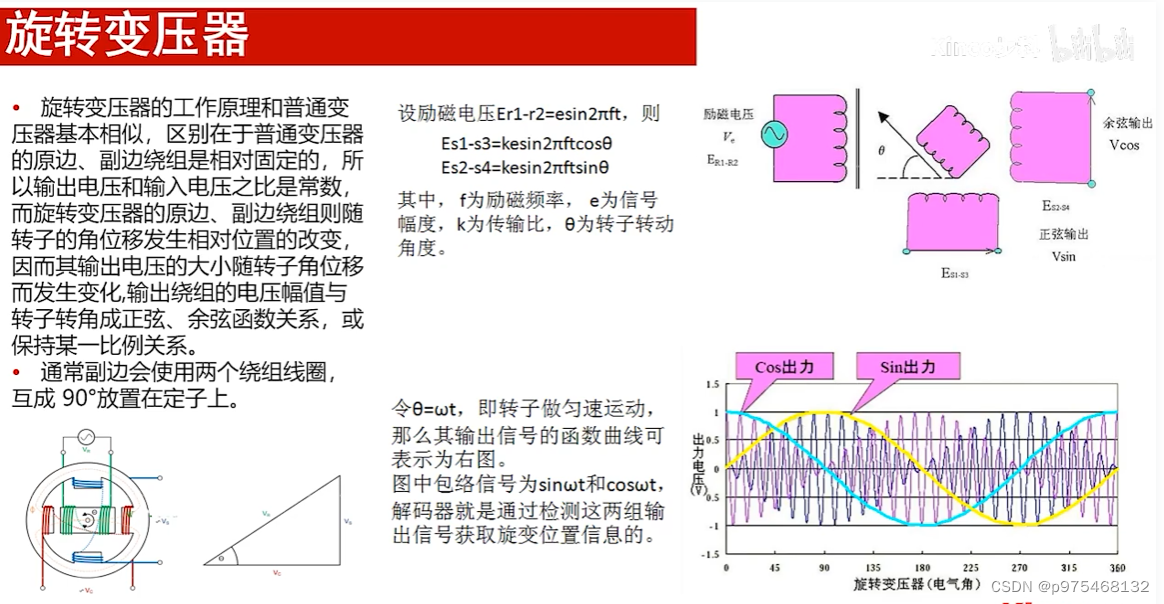
旋转变压器
编码器参数
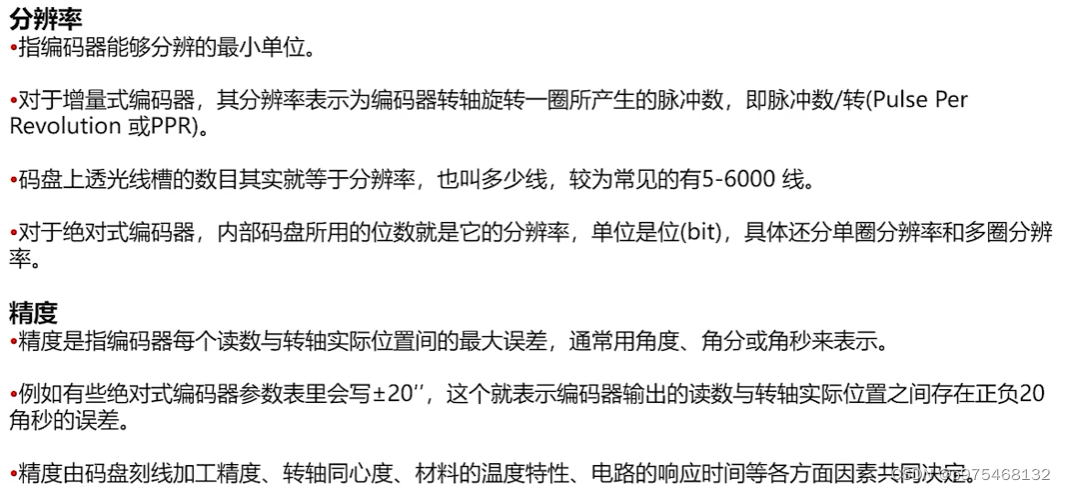
1度=60角分=3600角秒
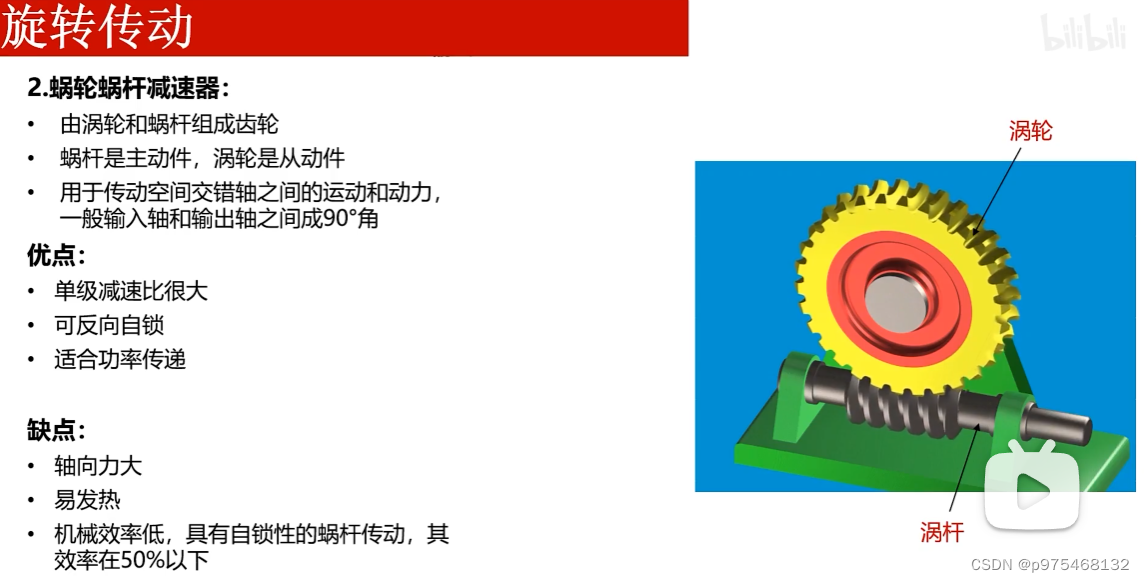
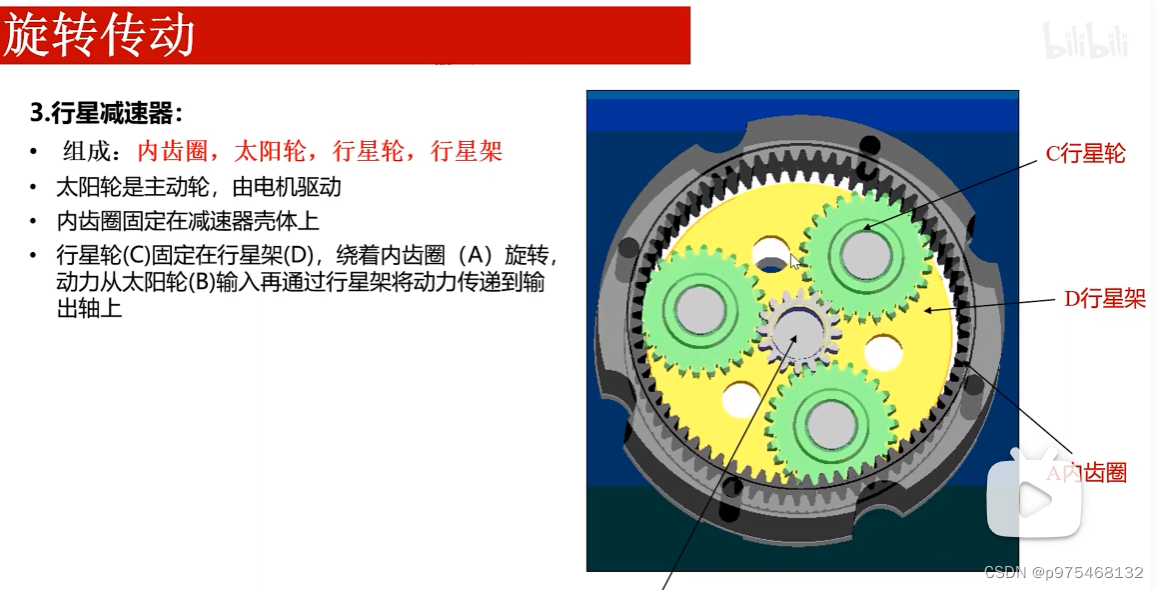
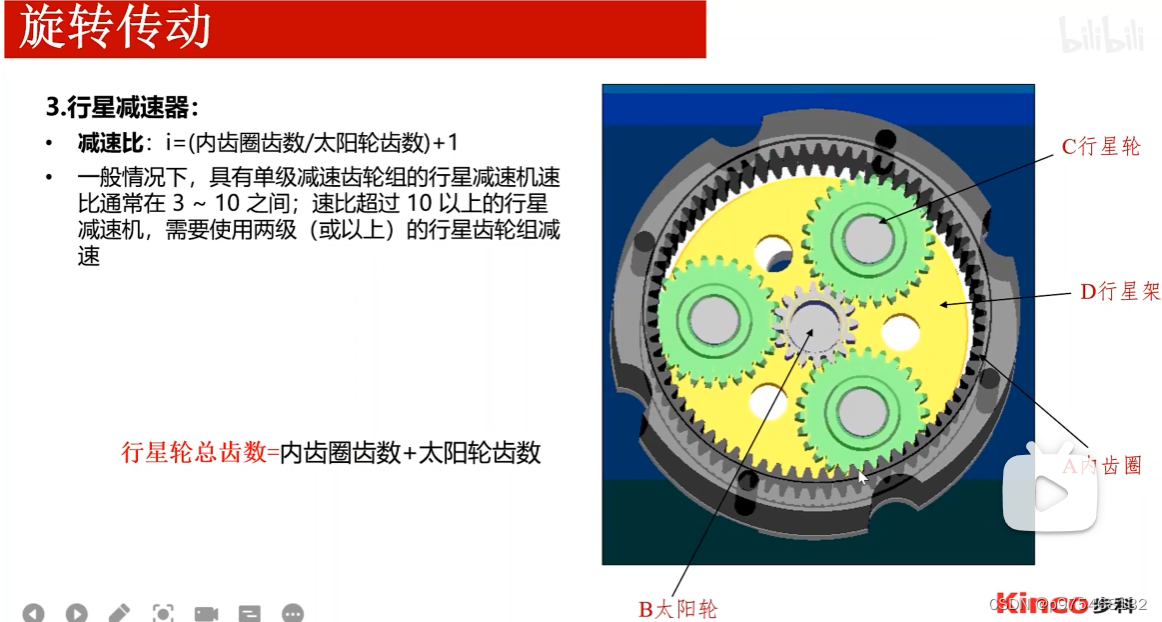
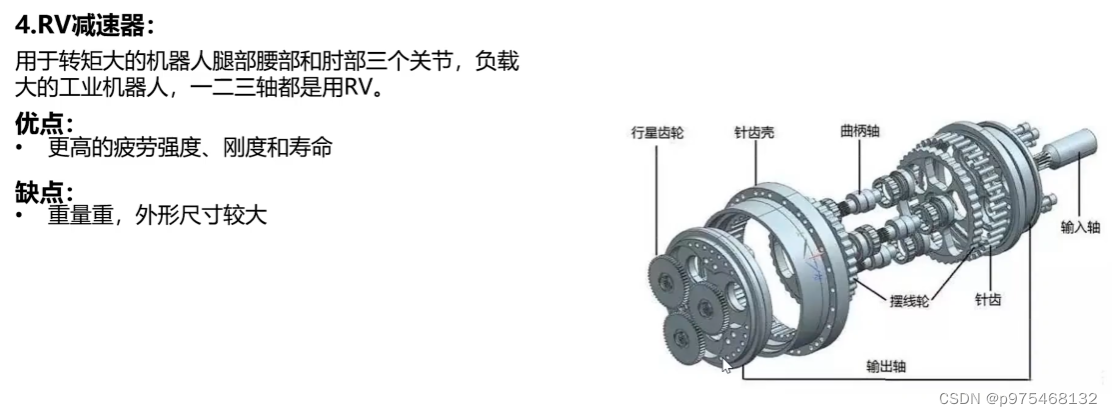
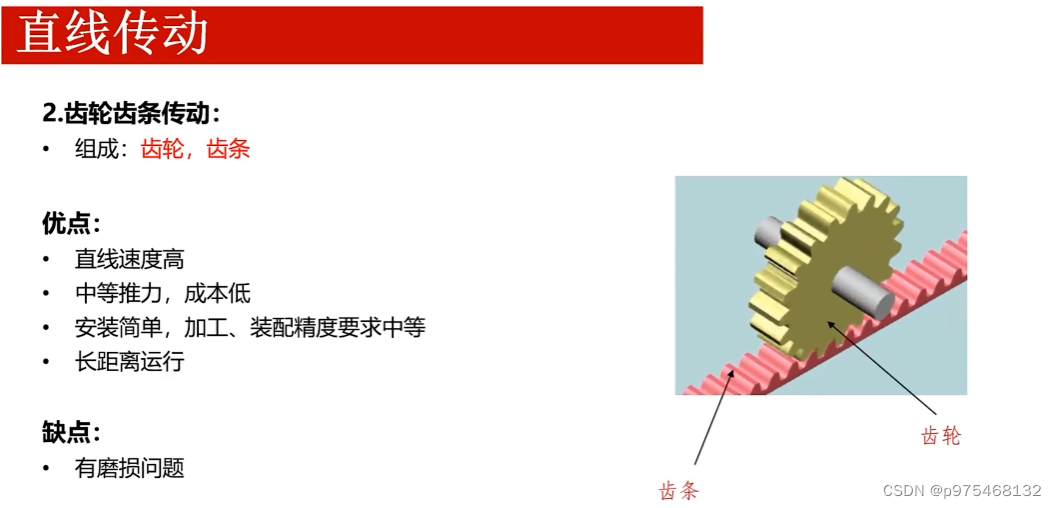
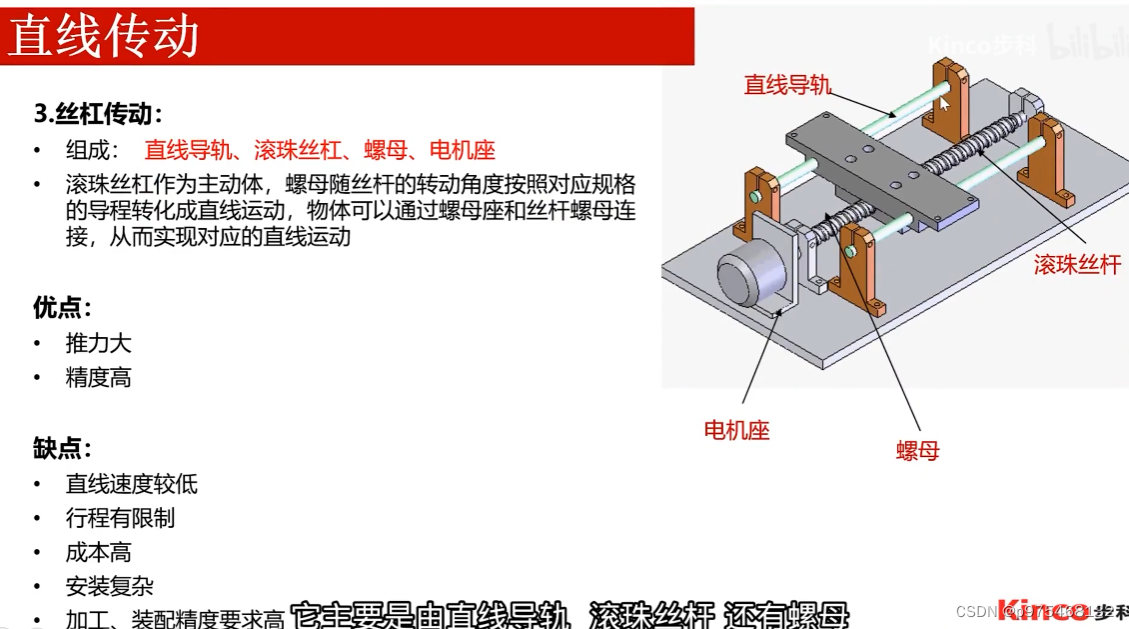
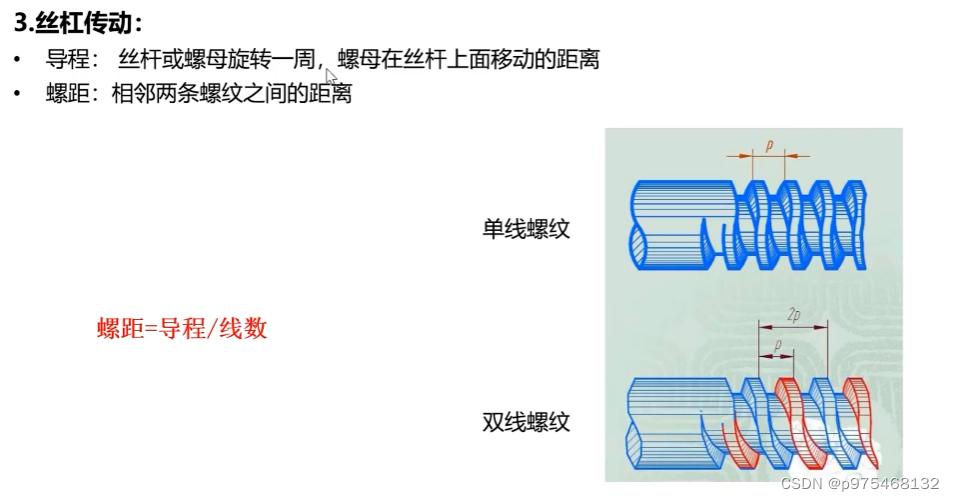
常见传动方式




















 7556
7556











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









