






Simulink和Carsim联合仿真车辆状态估计
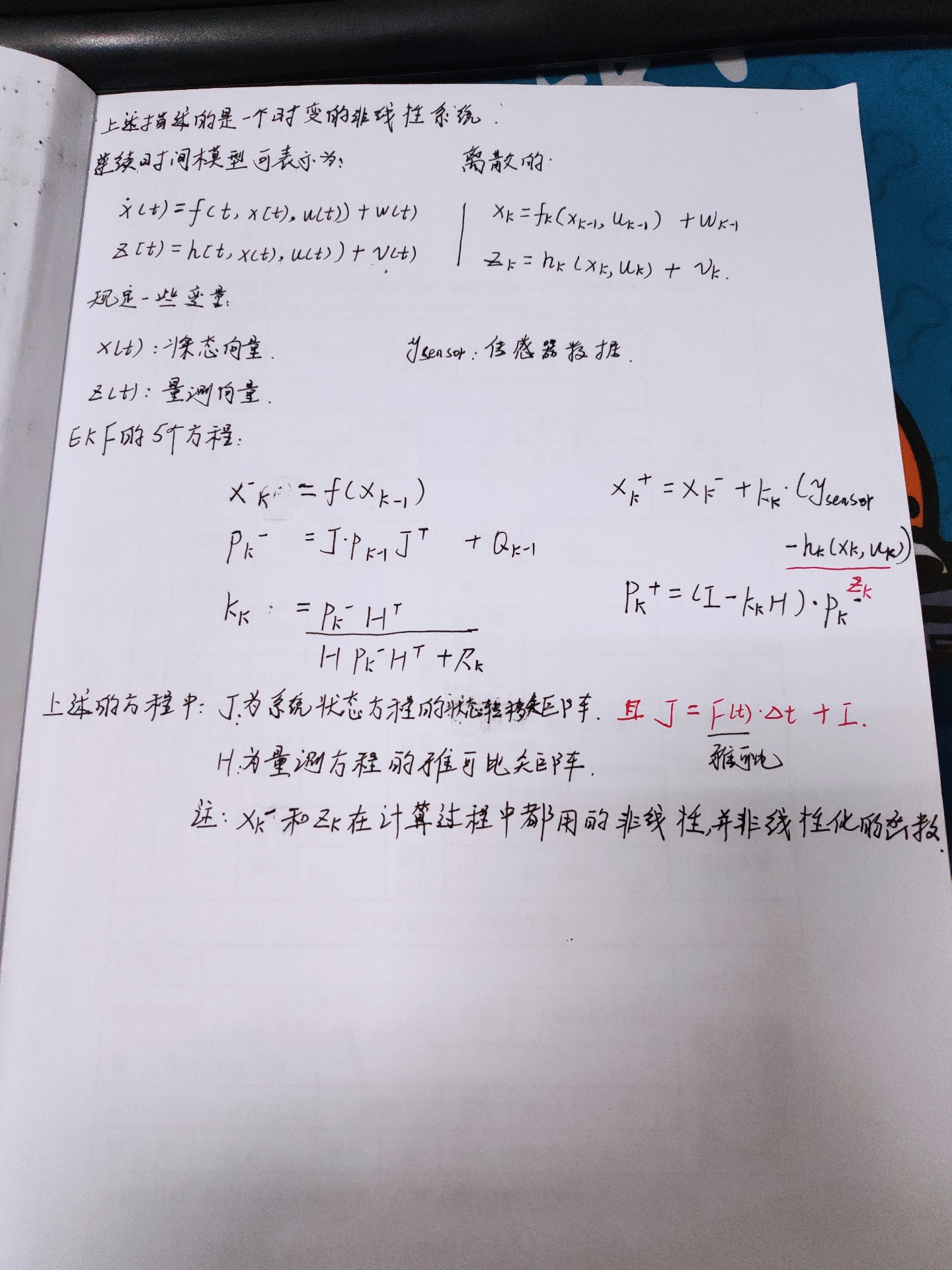
方法:卡尔曼滤波的EKF,UKF,CKF等
系统的输入量:前轮转角,纵向加速度,侧向加速度等(可以自由定义)
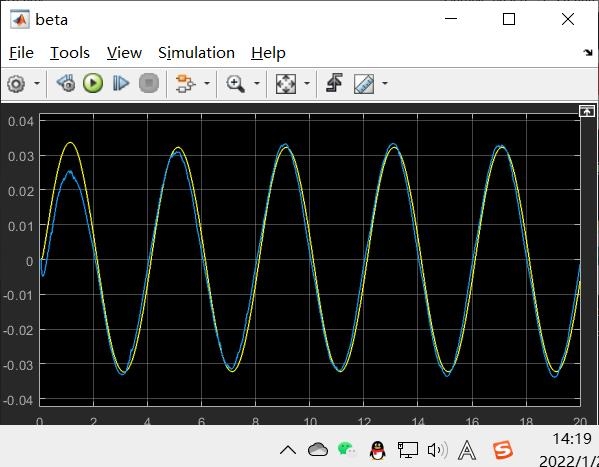
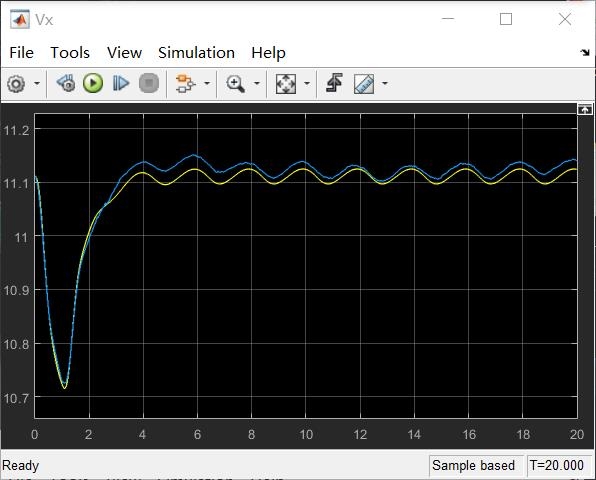
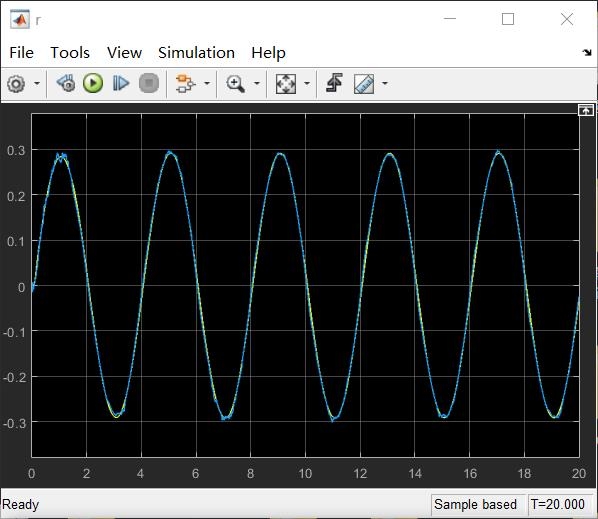
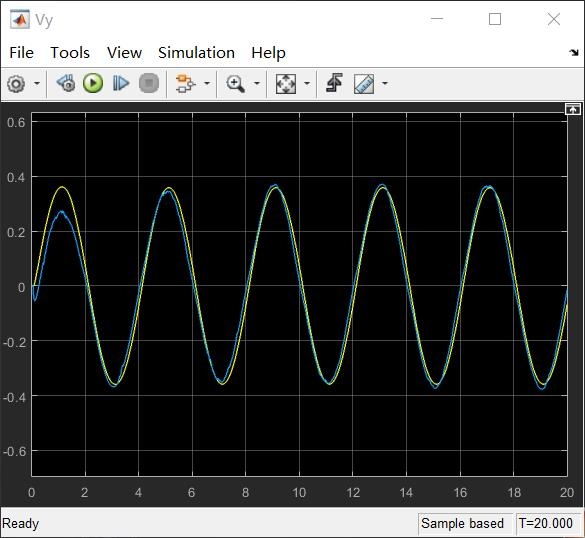
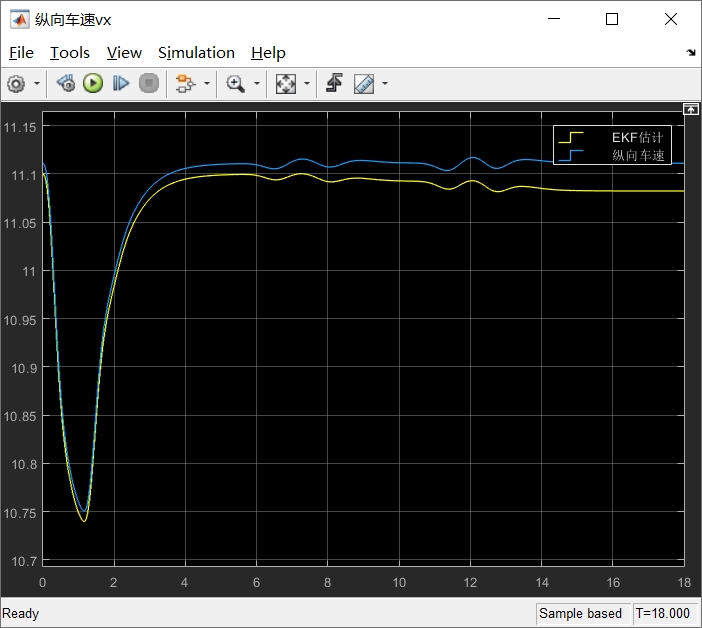
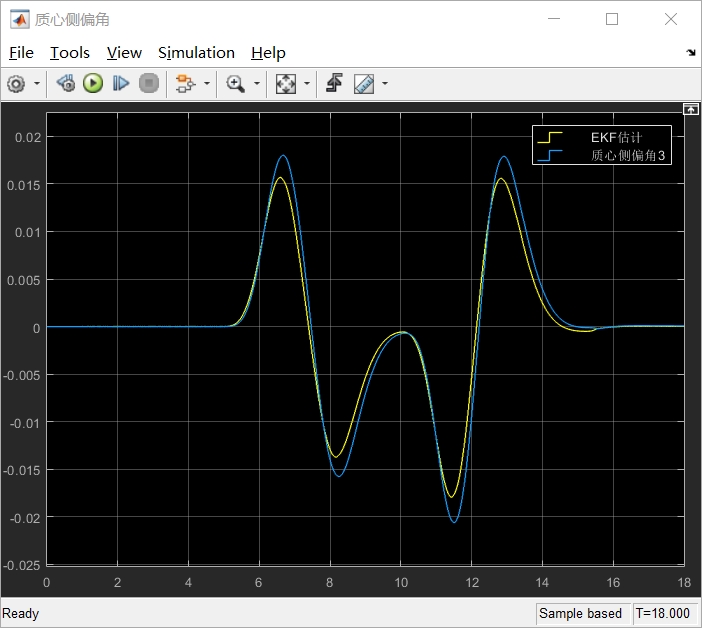
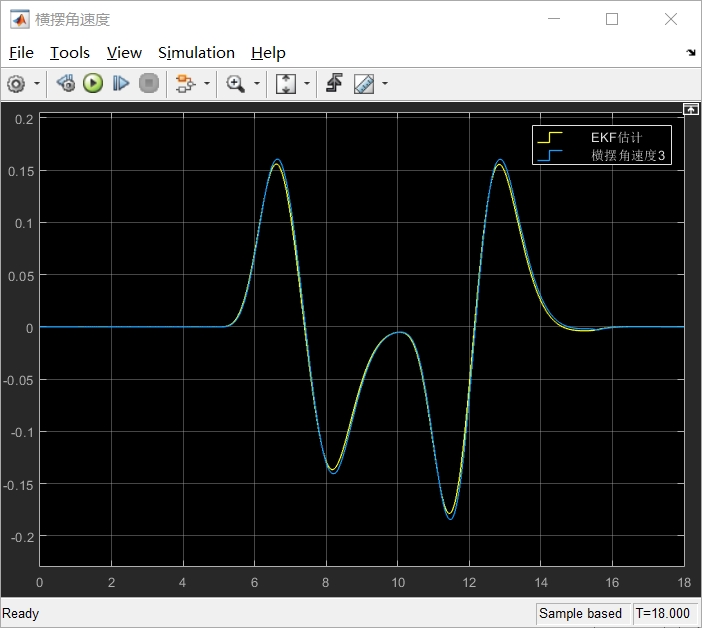
估计的状态量:横摆角速度,质心侧偏角,纵向车速,侧向车速
Carsim提供实车的数据,Simukink中搭建观测器,S函数写的滤波代码,易懂易调,联合仿真相比于纯Simulink模型的状态估计,联合仿真更具有说服力,所有模型均为本人硕士期间搭建,有完整的模型,注释,参数,说明文档,可提供各种细节,支持一手资料
ID:21350673413229814
车辆研究僧
Simulink和Carsim联合仿真车辆状态估计
在车辆控制系统中,准确估计车辆的状态量对于实现精准控制至关重要。Simulink和Carsim联合仿真方法为我们提供了一种有效的方式来估计车辆状态量。本文将介绍通过Simulink和Carsim联合仿真实现车辆状态估计的方法,并重点讨论卡尔曼滤波的EKF、UKF、CKF等算法的应用。
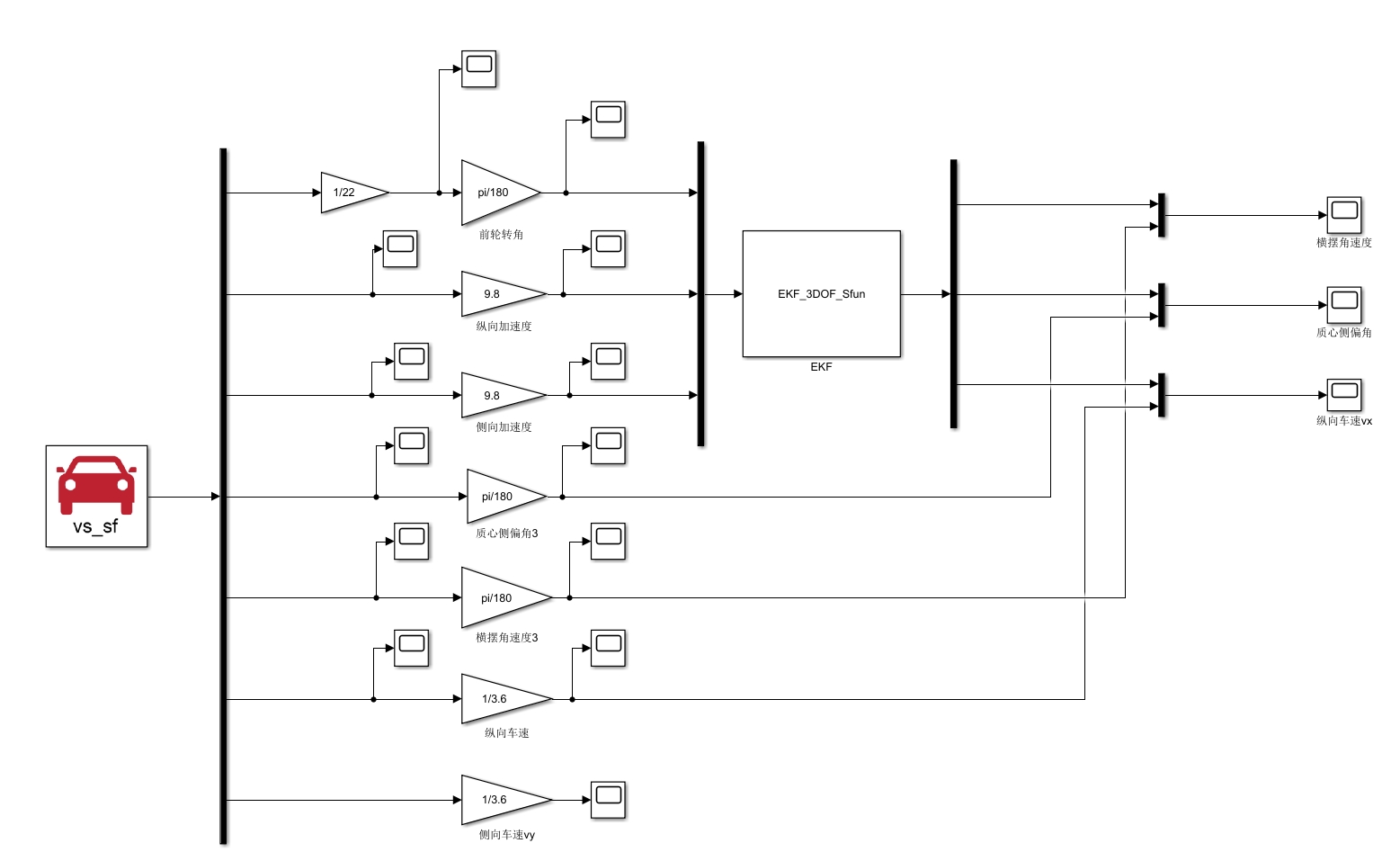
在Simulink和Carsim联合仿真中,我们首先需要定义系统的输入量和估计的状态量。系统的输入量可以包括前轮转角、纵向加速度、侧向加速度等,这些量的定义可以根据具体的需求进行自由设定。而估计的状态量则包括横摆角速度、质心侧偏角、纵向车速、侧向车速等。通过对输入量和状态量的定义,我们可以在联合仿真中实现对车辆状态的准确估计。
Carsim提供了实车的数据作为我们仿真的输入,而Simulink则搭建了观测器并编写了滤波代码。这样的组合使得联合仿真相比于纯Simulink模型的状态估计更具有说服力。通过联合仿真,我们可以更加准确地估计车辆的状态量,从而提高了控制系统的稳定性和精度。
卡尔曼滤波是一种常用的状态估计方法,而EKF、UKF、CKF则是卡尔曼滤波的不同变体。这些算法通过对系统的状态和观测进行不断的迭代和修正,可以有效地减小估计误差。在Simulink和Carsim联合仿真中,我们可以根据具体的需求选择合适的滤波算法来实现对车辆状态的估计。
通过Simulink和Carsim联合仿真,我们可以获得系统的输入数据和估计的状态量,这为我们进一步的控制和优化提供了重要的信息。在本文中,我们提供了本人在硕士期间搭建的完整模型、注释、参数和说明文档,以支持读者对于联合仿真方法的理解和应用。这些一手资料将为读者提供丰富的细节和支持。
总之,通过Simulink和Carsim联合仿真的方法,我们可以实现对车辆状态的准确估计。通过选择合适的滤波算法,我们可以进一步提高估计的精度和稳定性。本文提供的模型和资料将为读者在车辆状态估计领域的研究和应用提供重要的参考。
相关的代码,程序地址如下:http://wekup.cn/673413229814.html
















 2634
2634











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









