







目录
主要内容:
3.1 线性系统时间响应的性能指标
3.2 一阶系统的时域响应
3.3 二阶系统的时域响应
3.4 高阶系统的时域响应
3.5 稳定性分析
3.6 稳态误差计算
3.4.1 高阶系统的阶跃响应
3.4.2 闭环主导极点
在二阶系统中,一般用阻尼比和自然振荡频率来衡量系统的特性。
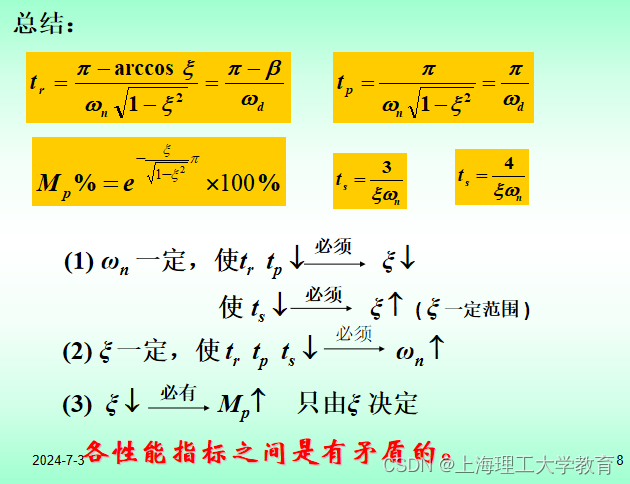
3.3.4 二阶系统的动态性能指标
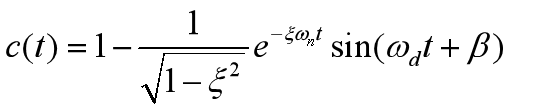
1. 欠阻尼
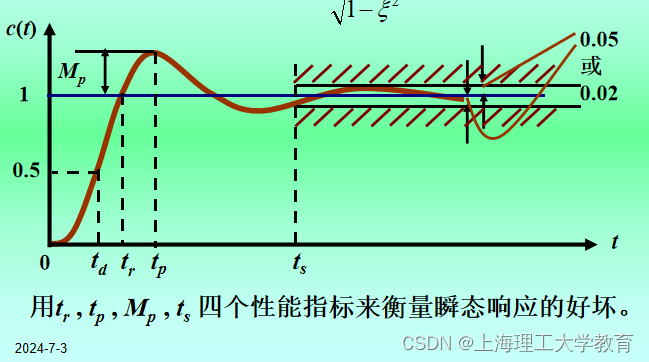
衡量瞬态响应的指标:上升时间,峰值时间,超调量,调节时间。
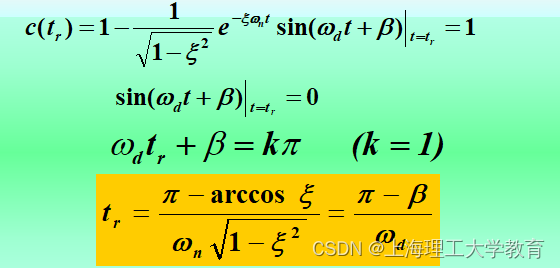
(1) 上升时间tr :从零上升至第一次到达稳态值所需的时间,是系统响应速度的一种度量。tr 越小,响应越快。
(2) 峰值时间tp:响应超过稳态值,到达第一个峰值所需的时间。

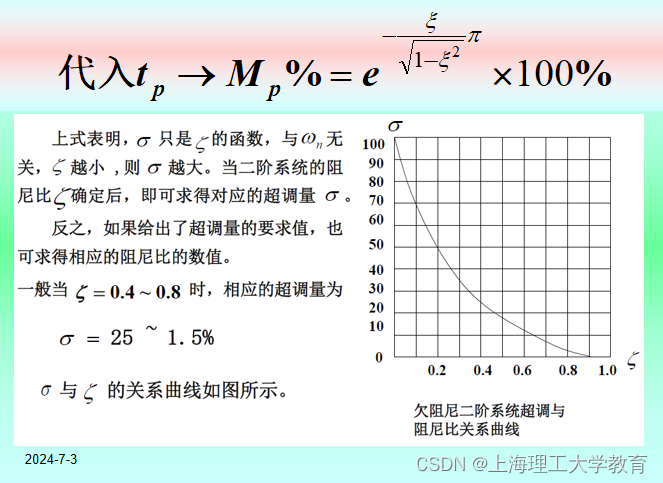
(3) 超调量Mp:响应曲线偏离阶跃曲线最大值,用百分比表示。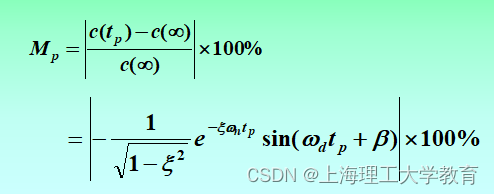
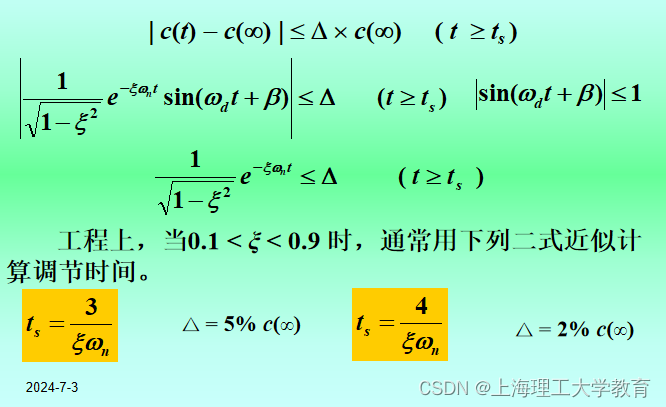
(4) 调节时间ts :响应曲线衰减到与稳态值之差不超过5%所需要的时间。
2. 过阻尼
由于响应缓慢,一般不采取过阻尼系统。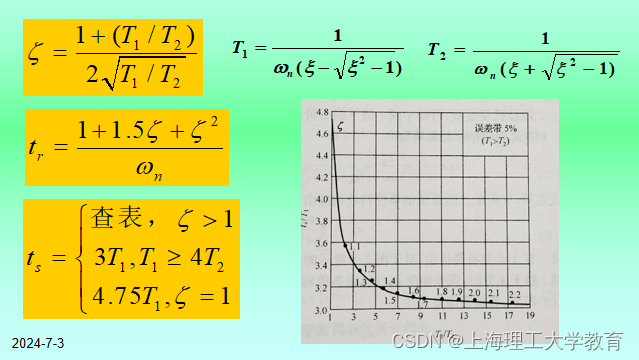
例题
例3-1 单位负反馈随动系统如图所示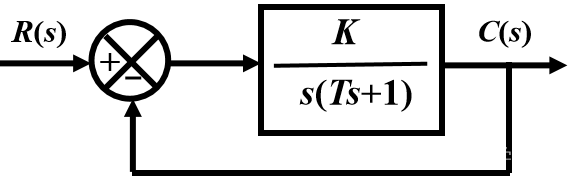
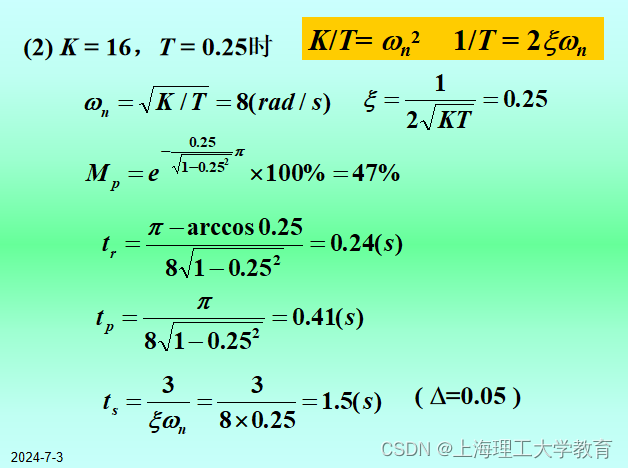
1) 确定系统特征参数与实际参数的关系 。 (2) 若K = 16(rad/s)、T = 0.25(s),试计算系统的动态性能指标。 解: (1) 系统的闭环传递函数为

与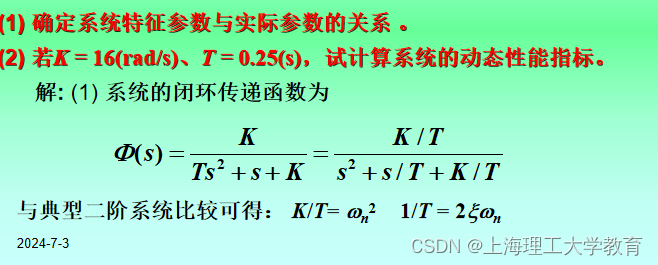
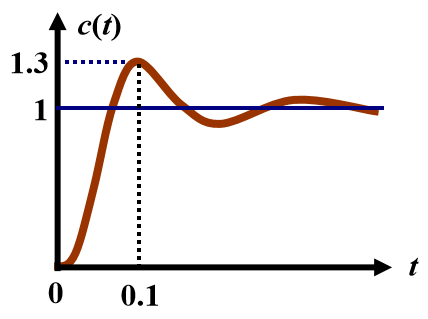
例3-2 已知单位负反馈系统的单位阶跃响应曲线如图所示,试求系统的开环传递函数。
解:由系统的单位阶跃响应曲线,直接求出超调量和峰值时间。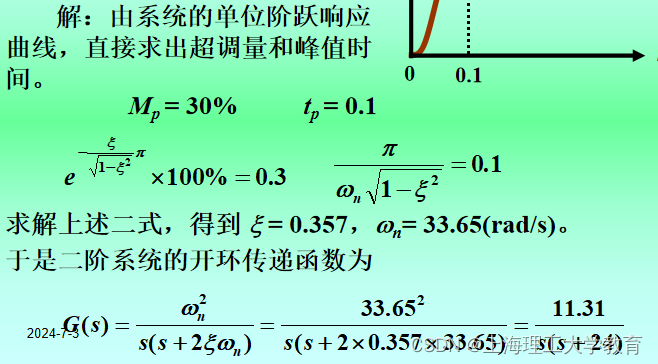
例3-3:
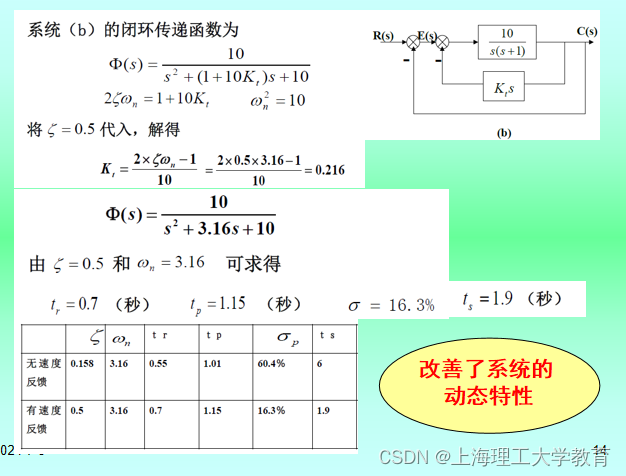
设控制系统如图所示。其中(a)为无速度反馈系统,(b)为带速度反馈系统,已知系统(b)的阻尼比为0.5,比较系统(a)和(b)阶跃响应的动态性能指标。

3.4高阶系统的时域分析
3.4.1 高阶系统的阶跃响应
控制系统的基本结构如图所示。 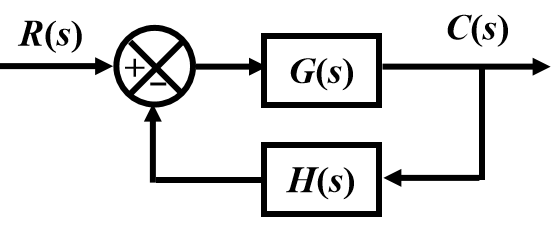
其闭环传递函数为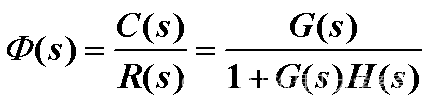
G(s),H(s) 一般是复变量s 的多项式之比,故上式可记为
根据能量的有限性,分子多项式的阶次m不高于分母多项式的阶次n。对上式进行因式分解,将其表示为零、极点形式: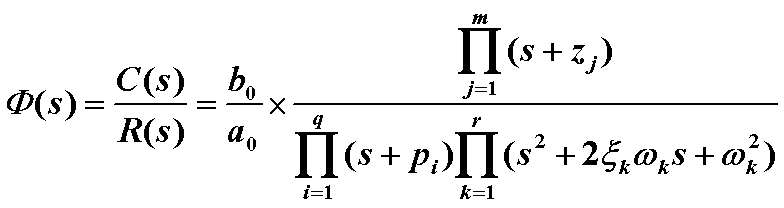
式中0 < ξ k <1 。假设系统有m个实数零点;n个极点(其中有q 个实数极点和r 对共轭复数极点,q+r=n )。令D(s)=0可以得到闭环特征方程,其根称为系统闭环特征根,或闭环极点。
当输入为单位阶跃信号时,系统单位阶跃响应的拉氏变换表示为: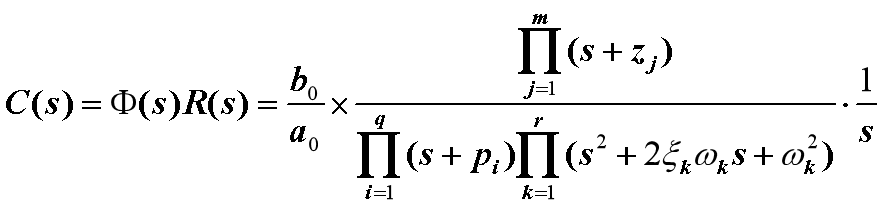
将上式进行部分分式变换,并设全部初始条件为零,再取拉氏反变换(可以查表得到),得到系统单位阶跃响应的时间表达式:

单位阶跃响应C(t)由三项组成,上式表明,如果系统的所有闭环极点都具有负实部,系统时间域响应的各瞬态分量都将随时间的增长而趋近于零。高阶系统的稳定性分析及稳态误差的计算将在本章后面的小节中进行介绍。根据C(t)去分析高阶系统的动态性能指标是比较复杂的,一般工程上采用闭环主导极点的概念降阶来近似分析。
3.4.2 闭环主导极点
1)高阶系统瞬态响应各分量的衰减快慢由 pi ,ξkk决定,也即闭环极点负实部的绝对值越大,相应的分量衰减越快。
2)各分量所对应的系数由系统的零极点分布决定。
3)系统的零极点共同决定了系统瞬态响应曲线的形状。
4)闭环主导极点:对系统瞬态响应起主导作用的极点.
条件:
1 距离s平面虚轴较近,且周围没有其它的闭环极点和零点; 对应的瞬态分量衰减缓慢,起主要作用。 不会构成闭环偶极子,产生零极点相消现象。
2 其实部的绝对值比其它极点的 小5倍以上。 应用闭环主导极点的概念,可以把一些高阶系统近似为一阶或二阶系统,以实现对高阶系统动态性能的近似评估。 一般情况,高阶系统具有振荡性,所以主导极点常常是一对共轭复数极点。找到了一对共轭复数极点,高阶系统的动态性能就可以应用二阶系统的性能指标来近似估计。
资料仅供学习使用
如有错误欢迎留言交流
上理考研周导师的其他专栏:
上理考研周导师了解更多


















 6777
6777

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











