







关注作者了解更多
我的其他CSDN专栏
关注作者了解更多
资料来源于网络,如有侵权请联系编者
目录
7.1 霍尔元件及霍尔效应
7.2 基本测量电路及误差补偿
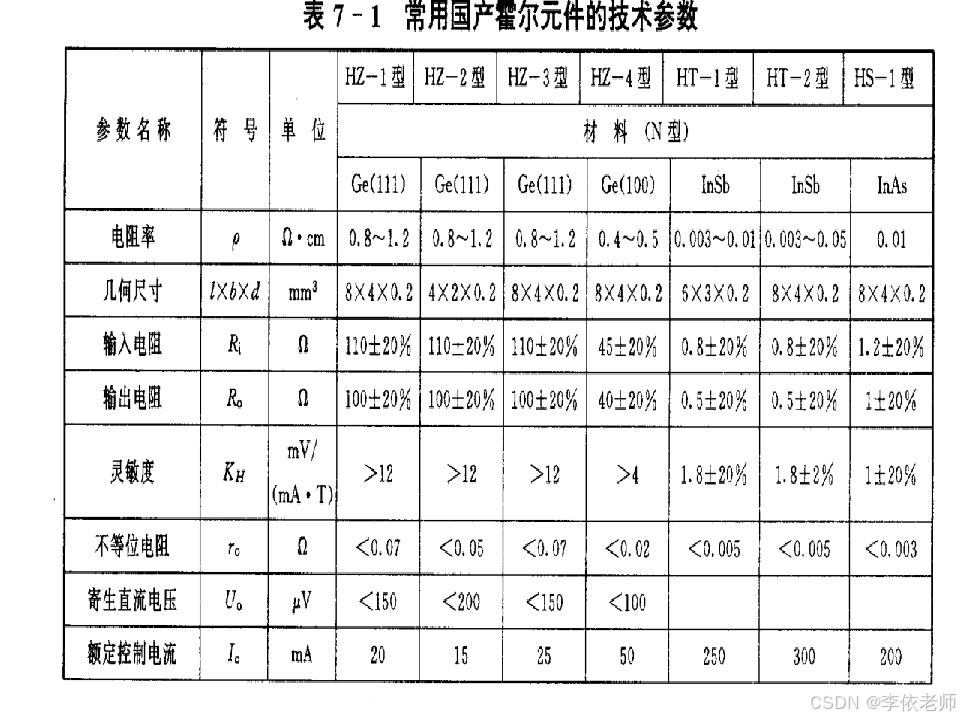
7.3 常用霍尔元件
7.4 霍尔式传感器的应用
霍尔式传感器概述
霍尔传感器是基于霍尔效应原理而将被测物理量(如电流、磁场,位移,压力等)转换成电动势输出的一种传感器。
1879年美国物理学家霍尔首先在金属材料中发现了霍尔效应,但由于金属材料的霍尔效应太弱而没有得到应用。随着半导体技术的发展,开始用半导体材料制成霍尔元件,由于它的霍尔效应显著而得到广泛应用和发展。霍尔传感器广泛用于电磁测量,压力,加速度,振动等方面的测量。
7.1 霍尔效应及霍尔元件
1.霍尔效应
置于磁场中的静止载流导体,当它的电流方向与磁场方向不一致时,载流导体上平行于电流和磁场方向上的两个面之间产生电动势,这种现象叫做霍尔效应。该电势称霍尔电势。
2.工作原理
在垂直于外磁场B的方向上放置一导电板,导电板通以电流I,方向如图所示。导电板中的电流是金属中自由电子在电场作用下的定向运动。此时,每个电子受洛伦兹力Fm的作用,Fm的大小为
Fm=eBv
式中,e——电子电荷
v——电子运动平均速度
B——磁场的磁感应强度
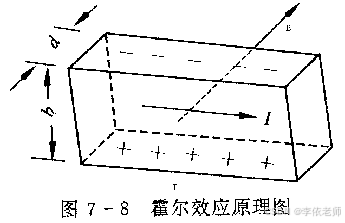
Fm的方向在图7-8中是向上的,此时电子除了沿电流反方向作定向运动外。还在fm的作用下向上漂移,结果使金属导电板上抵免积累电子,而下地面积累正电荷,从而形成了附加内电场,称霍尔电场,该电场强度为:

式中UH为电位差。霍尔电场的出现,使定向运动的电子除了受洛伦兹力作用外,还受到霍尔电场的作用力,其大小为EH,此力阻止电荷继续积累。随着上,下底面积累电荷的增加,霍尔电场增加,电子受到的电场力也增加,当电子所收洛伦兹力与霍尔电场作用力大小相等、方向相反时,即
eEH=evB
则
EH=vB
此时电荷不再向两底面积累,达到平衡状态。
若金属导电板单位体积内电子数为n,电子定向运动平均速度为v,则激励电流I=nevbd,则
将式(7-13)代入式(7-12)得
将上式代入式(7-10)得
式中KH称为霍尔片的灵敏度,由式(7-16)可见,霍尔电势正比于激励电流及磁感应强度,其灵敏度与霍尔常数成正比与霍尔片厚度成反比。为了提高灵敏度,霍尔元件常制成薄片形状。
对霍尔片材料的要求,希望有较大的霍尔常数,同时霍尔元件激励极间电阻为规定值。
迁移率是指载流子(电子和空穴)在单位电场作用下的平均漂移速度,即载流子在电场作用下运动速度的快慢的亮度,运动得越快,迁移率大。
运动的慢,迁移率小.
同一种半导体材料中,载流子类型不同,迁移率不同,一般是电子的迁移率高于空穴。
从式中可知,霍尔常数等于霍尔片材料的电阻率与电子迁移率u的乘积。
若要霍尔效应强,则RH值大,因此要求霍尔片材料有较大的电阻率和载流子迁移率。
一般金属材料载流子迁移率很高,但电阻率很小;
而绝缘体材料电阻率极高,但载流子迁移率极低。故只有半导体材料适于制造霍尔片。
目前常用的霍尔元件材料有:硅等半导体材料。其中N型容易加工制造,。其霍尔系数、温度性能和线性度都较好。N型硅的线性度最好,其霍尔系数、温度性能同N型绪相近。
3.霍尔元件基本结构
霍尔元件的结构很简单,它由霍尔片、引线和壳体组成,如图7-9(a)所示。
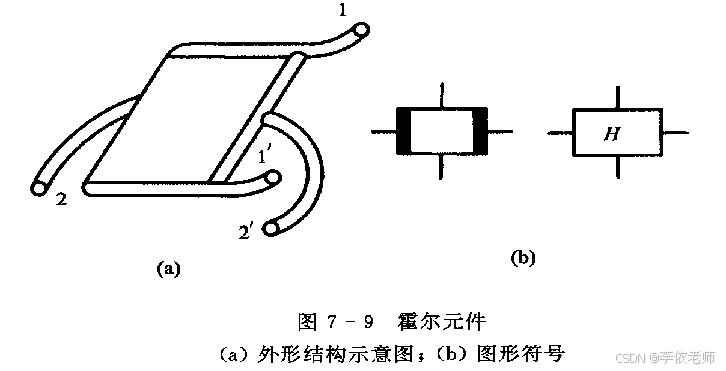
霍尔片是一块半导体单晶薄片,引出四个引线。
1,1‘两根引线加激励电压或电流,称为激励电流;
2,2’引线为霍尔输出引线,称为霍尔电极。霍尔元件壳体由非导磁金属、陶瓷或环氧树脂封装而成。在电路中霍尔元件可用两种符号表示,如图7-9(b)所示。
7.2 基本测量电路及误差补偿
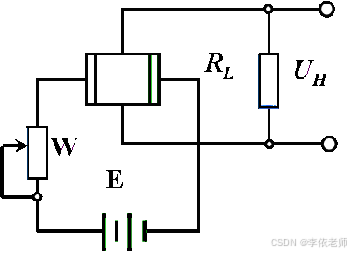
7.2.1测量电路
W为调节电阻,控制电流I由电源E供给,调节控制电流的大小。霍尔输出端接负载电阻RL,他也可以是放大器的输入电阻或表头内阻等。
7.2.2霍尔元件的测量误差与补偿
误差电动势产生的主要原因有两类:
一类是由于制造工艺的缺陷;
另一类是由于半导体本身的固有的特性。这里只分析由不等位电势和温度影响而产生的误差。
1.不等位电势UO及其补偿
不等位电势UO是一个主要的零位误差。霍尔电动势是由A,B两点引出的,由于工艺上无法保证霍尔电极A,B完全焊在同一等位面上,因此当控制电流I流过元件时,即使不加磁场,AB两点间也存在一个电势UO,这就是不等位电势。
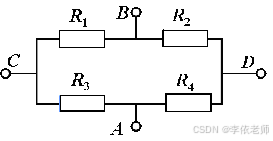
在分析不等位电势时,可以把霍尔元件等效为一个电桥。
电桥臂的四个电阻分别是R1,R2,R3,R4.当两个霍尔电极A,B处在通以等位面上时,R1=R2=R3=R4,电桥平衡,不等位电势UO等于零。当两个霍尔电极不在同一等位面上时,电桥不平衡,不等位电势不等于零。此时可根据A,B两点电位的高低,判断应在某一桥臂上并联一定的电阻,使电桥达到平衡,从而使不等位电势为零。
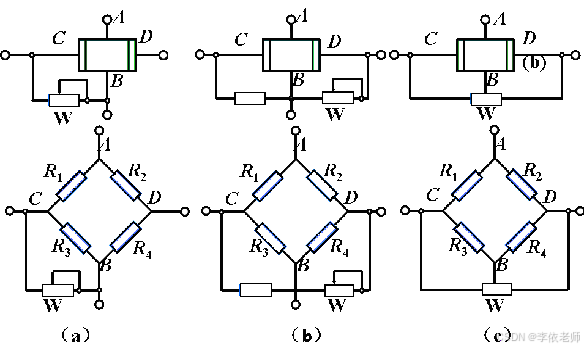
几种补偿线路:图6-6(a),(b)为常见补偿电路;图6-6(b),(c)相当于在等效电桥的两个桥臂上同时并联电阻,其中图6-6(c)调整比较方便。如果确切知道霍尔电极偏离等位面的方向,则可在工艺上采取措施来较小不等位电势。
2.温度误差及其补偿
霍尔元件与一般的半导体器件一样,对温度的变化使敏感的,会给测量带来较大的误差。这是因为半导体材料的电阻率,迁移率和载流子浓度等都随温度变化。因此,霍尔元件的性能参数(如内阻、霍尔电势等)也将随温度变化。
为了减小霍尔元件的温度误差,除选用温度系数小的元件或采用恒温措施外,用恒流源供电可以减小元件内阻随温度变化而引起的控制电流的的变化。
下面介绍集中简单的补偿电路
1.利用输入回路串联电阻进行补偿
霍尔元件系数和输入内阻与温度之间的关系式为
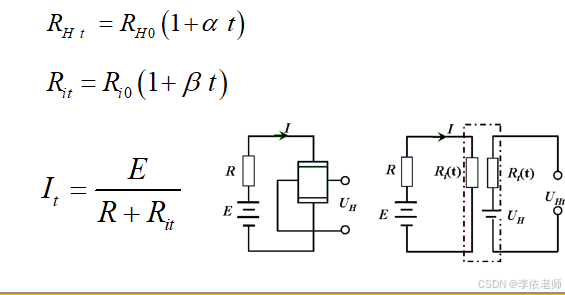
则霍尔电压随温度变化的关系式为
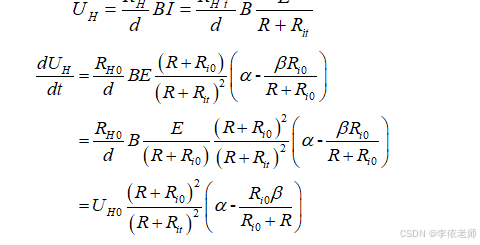
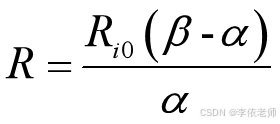
由上式可以看出,要使温度变化时霍尔电压不变,必须使

(2)利用输出回路的负载进行补偿
霍尔元件的输入采用恒流源,使控制电流I稳定不变。这样,可以不考虑输入回路的温度影响。在温度影响下,元件输出电阻和电势变为: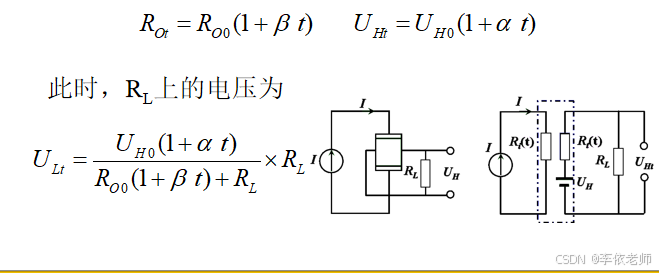
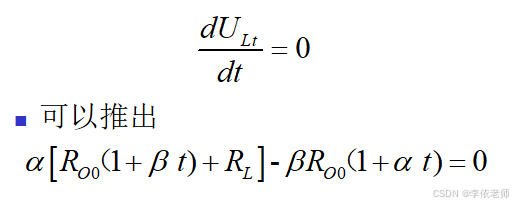
补偿电阻RL上电压随温度变化最小的极值条件为
(3)利用恒流源进行补偿
当负载电阻比霍尔元件输出电阻大得多时,输出电阻变化对霍尔电压输出的影响很小。在这种情况下,只考虑在输入端进行补偿即可。若采用恒流源,输入电阻随温度变化而引起的控制电流变化极小,从而较少了输入端的温度影响。
7.4霍尔式传感器的应用
1.霍尔式微位移传感器
霍尔元件具有结构简单、体积小、动态特性好和寿命长的优点,它不仅用于磁感应强度,有功功率及电能参数的测量,也在位移测量中得到广泛应用。
图7-12给出了一些霍尔式位移传感器的工作原理图。图(a)是磁场强度相同的两块永久磁铁,同极性相对地放置,霍尔元件处在两块磁铁的中间。
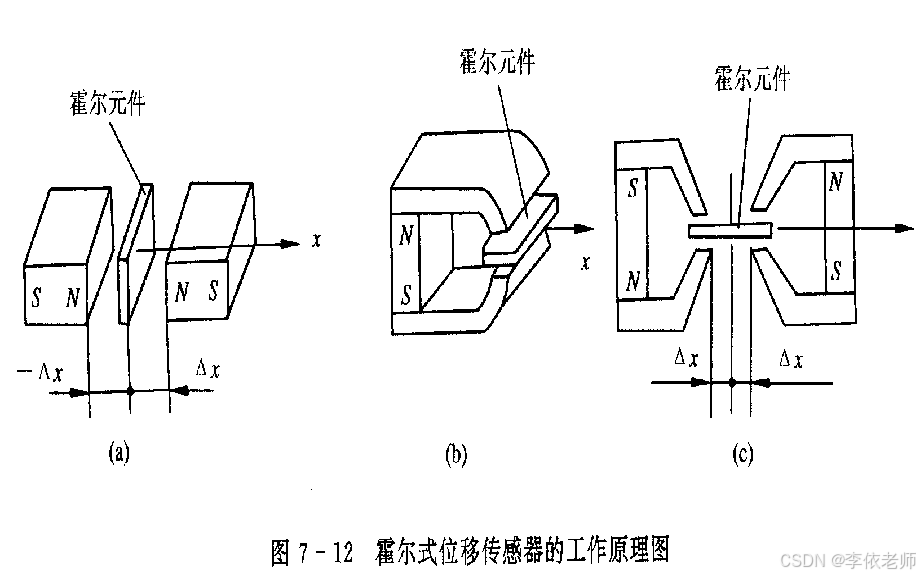
由于磁铁中间的磁感应强度B=0,因此霍尔元件输出的霍尔电势UH也等于零,此时位移X=0.若霍尔元件在两磁铁中产生相对位移,霍尔元件感受到的磁感应强度也随之改变,这时UH不为零,其两只大小反映出霍尔元件与磁铁之间相对位置的变化量,这种结构的传感器,其动态范围可达5mm,分辨率为0.001mm。
图(b)所示是一种结构简单的霍尔位移传感器,由一块永久磁铁组成磁路的传感器,在X=0时,霍尔电压不等于0.
图(c)是一个由两个结构相同的磁路组成的霍尔式位移传感器,为了获得较好的线性分布,在磁极端面装有计划,霍尔元件调整好初始位置,可以使霍尔电压UH=0.
这种传感器灵敏度很高,但他所能检测的位移量较小,适合于微小位移量及振动的测量。
2.霍尔式转速传感器
图7-13是几种不同结构的霍尔式转速传感器。磁性转盘的输入轴与被测转轴相连,当被测转轴转动时,磁性转盘随之转动,固定在磁性转盘附近的霍尔传感便可以在每一个小磁铁通过时产生一个相应的脉冲,检测出单位时间的脉冲数,便可知被测转速。磁性装盘上小磁铁的数目的多少决定了传感器测量转速的分辨率。
3.霍尔计数装置
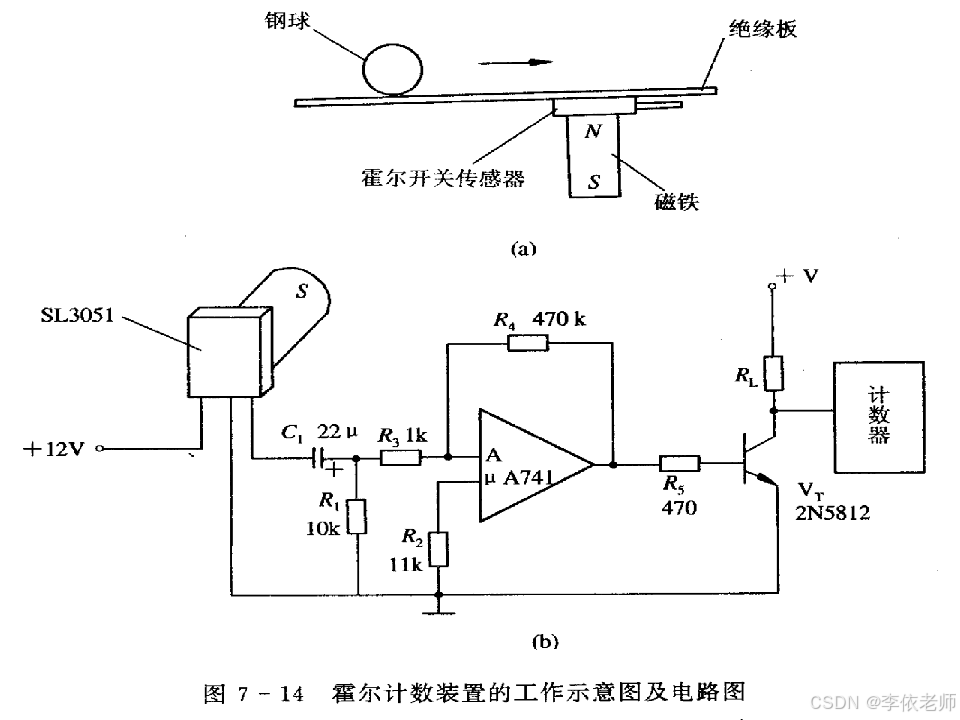
霍尔开关传感器SL3501是具有较高灵敏度的集成霍尔元件,能感受到很小的磁场变化,因而可对黑色金属零件进行计数检测。图7-14是对钢球进行计数的工作示意图和电路图,该电压经运算放大器放大后,驱动半导体三极管工作,输出端可接计数器进行计数,并由显示器显示检测数值。
HK600系列军用霍尔开关型集成电路
HK600系列霍尔开关型集成电路,是有电压调整器、霍尔电压发生器、差分放大器、施密特触发器和集电极开路的输出级组成的磁敏集成电路,其输入为磁感应强度,输出是一个数字电压信号。该电路采用黑陶瓷底盘、无磁镀金金属盖板气密性封装,是一种磁敏硅单片集成电路,适合于各种磁场下工作。工作温度范围为-55--125℃,可应用于航天、航空、舰船等领域



















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











