







一、简介
常用数字舵机的控制一般为周期20ms,在0.5-2.5ms之间为可控范围,对应占空比为2.5%-12.5%
二、CUBE配置
2.1配置定时器通道
定时器通道设置为PWM Generation

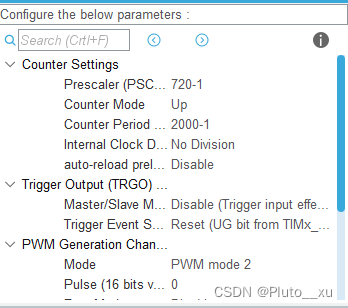
2.2配置参数
设置PSC与ARR寄存器,周期为20ms,Mode设置为PWM mode 2(注:PSC的值太大会不可控制)
周期计算公式:
周期=1/(主时钟频率/PSC/ARR)
mode1与mode2的区别:
- mode1:向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平,否则为无效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为无效电平(OC1REF=0),否则为有效电平(OC1REF=1)。
- mode2:在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平,否则为有效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平,否则为无效电平。
三、代码编写
/*
此代码对应的ARR值必须为2000
*/
#define ServeAngle 180 //使用不同角度的舵机,修改此参数即可
#define Angle(x) 1750+(20000/ServeAngle)*x/100 //将寄存器值转换为角度
//参数为舵机的绝对角度
void ServeCtrl(unsigned int angle)
{
htim3.Instance->CCR1 = Angle(angle);
}
int main(void)
{
MX_TIM3_Init();
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1); //开启定时器通道
ServeCtrl(120); //调用函数
}















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









