







【2015】Towards Geo-Referenced AUV NavigationThrough Fusion of USBL and DVL Measurements
1. 摘要
- 一个融合了DVL和USBL声学导航数据的适用于的AUV的导航系统,可提供出色的三维位置估计.
- AUV运动和USBL观测是高度非线性的过程,其中包含非高斯噪声。因此,选择粒子滤波器作为一种合适的数据融合技术。粒子过滤器用于将USBL观测值与DVL测量值融合在一起,以给出不漂移的地理参考位置估计。
- 使用从最近的数据集评估数据融合算法的性能。
2. Introduction
2.1 DVL
- 声学多普勒速度仪(DVL)是一种测量相对于水底速度的声纳设备。早年DVL一开始被设计主要是用于船舶的定位导航中,但是近年来随着水下机器人领域.
- DVL的作用显得愈发重要,因为水下机器人想要在水下实现自主导航有三样东西必不可少: 姿态测量单元,速度测量单元,位置测量单元。1)姿态测量单元通常是通过MEMS惯导元件或者光纤惯导元件等测量得到的,而MEMS通常价格非常便宜,非常容易获得,因此它可以被大量广泛的用在水下机器人中;2)位置测量单元可以由GPS、USBL等设备构成,获取的难度相对容易,成本也不算太高;3)速度测量单元目前最有效的手段就是通过DVL来获取,但其成本高昂,售价一般在十几万以上甚至更高,因此在目前民用的水下机器人上很少有它的身影。
- 该技术的一个问题是,对于当前的商业可用系统,AUV必须保持足够靠近海底的深度才能使DVL具有底部锁定功能,最多可以达到数百米(取决于频率)。
- 航位推测法的另一个问题是导航错误是无界的。可以通过定期地进行GPS位置更新来解决此问题,但是对于深度操作的AUV,进出水面的AUV会浪费时间和精力,并且如果无法使用底锁,则会在下降期间再次引入导航错误。
2.2 声学导航
- 根据基线的长度进行分类: LBL(Long Baseline,100-6000m), SBL(Short Baseline20-50m), USBL(ultrashort Baseline, <10m).
- 对于高精度位置检测,现在最好的方法是高频LBL系统。一个300kHz的系统可以在大约100m的范围内获得亚厘米的精度,而一个12kHz的系统可以在5-10km的范围内运行,并且精度可降低0.01-1Om。该技术需要在海底部署一系列声学信标。网络的内部一致性可以得到保证,但是地理参考的全球定位只能重复测量的质量。
- SBL中,三个或更多个收发器安装在水面舰船的船体上(如果系统反向,有时安装在AUV的船体上),形成一个三角形。每个收发器之间的距离是精确已知的。然后,当声脉冲通过每个收发器时,从相对到达时间的检测中得出安装在AUV上的方位单个应答器。应答器的距离是从飞行时间算起的。
- USBL系统的操作类似于SBL,但是方位是从声脉冲到达收发器的各个元件时的相位差得出的。 USBL系统的主要优点是易于安装,因为收发器阵列包含在一个单元中。
3.
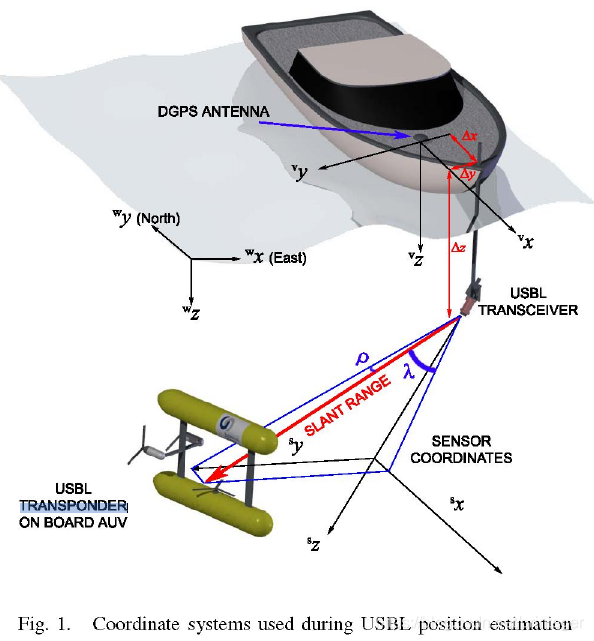
3.1 USBL标定
3.2 数据融合
为了合并USBL和DVL数据,我们使用大量的“粒子”来使用粒子过滤器来表示AUV的可能轨迹。如果粒子云仍然代表着可能的车辆轨迹,则必须构建精确的车辆运动模型,并仔细建模所有相关的错误。我们使用一个由两个部分组成的误差模型:一个比例因子来解决DVL速度测量中的偏差和随机噪声;一个航向误差来解决罗盘偏差和随机噪声以及传感器的未对准问题
4. 实验
[2015]Toward autonomous exploration in confined underwater environments【介绍实验】
1. 摘要/简介
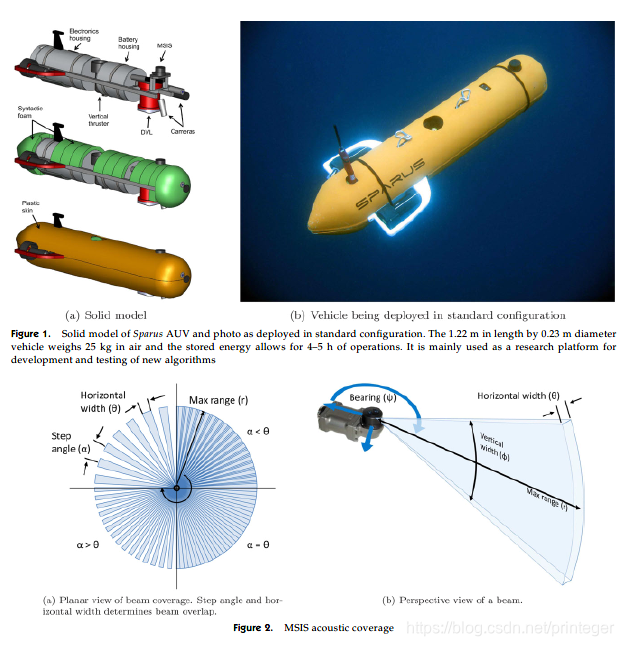
- 此文中,介绍了操作讨论了使用无人水下航行器(AUV)在水下洞穴综合体的非结构化环境中进行的实验结果。在这项实验中,AUV配备了两个声纳传感器,可以同时绘制洞穴的水平和垂直表面。尽管洞穴的空间复杂性需要潜水员的AUV指导,但这种野外部署成功地展示了同时定位和制图框架中的扫描匹配算法,该算法可显着减少和限制完全自主导航的定位误差。这些方法可普遍用于在水下环境中无法进行定位设备的预部署或预部署的AUV勘探,它们可能为在水下受限灾区中将AUV用作应对工具提供有用的步骤.
- 在受限的非结构化环境中,自动水下航行器(AUV)的稳固定位仍然具有挑战性。在大多数情况下,AUV要求在无人值守的情况下长时间运行,以精确的覆盖范围对大面积进行调查。为了满足这些要求,通常将应答器部署在形成长基线(LBL)系统的操作区域附近,以提高导航精度,但这会带来其他基于舰船的测量操作的缺点,从而增加了总体复杂性。如今,更常见的技术是将应答器安装在支持船上,形成一个超短基线(USBL)系统,该系统大大降低了系统的复杂性,但代价是相对于LBL降低了准确性,并要求支持船跟随水下机器人.
- 在之前的研究中(Mallios,Ridao,Ribas和&Hern´andez,2014),我们提出了一种基于姿势的算法来解决在受限,未知且可能是非结构化环境中AUV定位的完整SLAM问题。该算法不依赖特征或任何结构信息,当应用于自然环境时,这可能是有利的。该方法首先估计机器人在通过来自MSIS的距离数据形成声像(扫描图)时所经过的本地路径,从而提供位置估计值以校正车辆运动在扫描图中引入的变形。扫描的每个新姿态都保持在增强状态EKF(ASEKF)中,并使用概率扫描匹配将其与附近区域中的先前扫描进行比较。如果有足够的扫描点重叠,则扫描之间的匹配将在姿势之间引入约束,并更新ASEKF。这些约束条件有助于识别和闭合环路,从而校正整个轨迹,从而限制漂移。使用来自码头结构化环境的数据集对该算法进行了测试,地面真实性验证证实了该方法可以将平均误差限制在1.90 m范围内,对于600 m的轨迹路径,其方差为±1.09 m。
【2014】Scan matching SLAM in underwater environments
1.摘要/概述
- 本文提出了一种基于姿态的算法,以解决在未知且可能是非结构化环境中导航的自动水下航行器(AUV)的完全同时定位和制图问题。
- 方法:1) 首先估计机器人在通过来自单束旋转声纳头的距离数据形成声像(扫描)时行进的本地路径,从而提供位置估计值,以校正车辆运动中扫描产生的变形。2) 然后,在概率扫描匹配技术下对连续的扫描进行交叉配准,以估计车辆的位移,包括扫描匹配结果的不确定性。3) 最后,增强状态扩展卡尔曼滤波器估计并保持已记录的扫描姿势。不考虑先前的结构信息或初始姿势。
- 该技术结合了两个并行运行的扩展卡尔曼滤波器(EKF)。第一种方法是根据多普勒速度测井(DVL)和姿态和航向参考系统(AHRS)估算的车辆推算航位。第二个是增强状态EKF(ASEKF),它是通过概率扫描与从机械扫描成像声纳(MSIS)收集的距离和方位测量值进行匹配而更新的。
-
- 已对所提出方法的可行性进行了测试,以重建在码头环境中沿600 m路径运行的制导AUV的轨迹。














 3062
3062











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









