





1. 关于作者 Masoud Iranmehr
简介:
作者出生在伊朗马赞达兰省的萨里市。我在伊朗德黑兰的夏里夫大学获得了电子科学硕士学位。
我的兴趣
我对嵌入式系统(Linux/Arm)和机器人学特别感兴趣,尤其喜爱ROS(机器人操作系统),因为它非常易于使用,并且可以通过多种编程语言如C++、Python、Javascript等进行开发。我发现Ardupilot是一个非常专业的开源软件包,可以驱动各种类型的机器人,包括飞机、直升机和巡航器。因此,我决定使用这个工具来驱动简单的机器人,并通过ROS对其进行控制。
此外,我精通在机器人领域使用ARM微控制器(STM32),并能够直接在这些处理器与ROS之间进行通信。这种技术可以用来设计在ROS功能下运行的简单机器人。
我在这里愿意分享我的机器人学知识给大家。
如果你对我的示例程序及其文档感兴趣,欢迎加入我的git仓库并成为贡献者。
你可以通过以下方式免费向我询问有关我的程序包的问题:
邮箱地址:masoud.iranmehr@gmail.com
诚挚地,
Masoud Iranmehr
2. 主页
(1)欢迎来到 MAVROS 教程
Author: Masoud Iranmehr
Github Page: https://github.com/masoudir/mavros_tutorial
C++ Examples on Github: https://github.com/masoudir/mavros_cpp_examples
Python Examples on Github: https://github.com/masoudir/mavros_python_examples
Web Page: https://masoudir.github.io/mavros_tutorial/
(2)介绍
该项目展示了一些关于使用 python 和 C++ 语言以及 MAVROS(机器人操作系统的 MAV 链接协议)通过 Ardupilot-SITL 模拟机器人的示例。
(3)安装要求
A.安装一些必要的软件包
只需执行以下命令:
安装python3和pip3
sudo apt-get install python-dev python-pip python3-dev python3-pip python3-rospkg
B.安装 Ardupilot-SITL
Ardupilot-SITL 是用于 ArduPilot 开发和测试的模拟环境。它允许开发人员在计算机上模拟飞行器(如飞机、直升机、无人机和车辆)的运行,而无需实际飞行硬件。通过 Ardupilot-SITL,开发人员可以测试飞行控制算法、自动飞行模式和传感器集成,以及对飞行器行为进行调试和验证,而无需飞行实际飞行器。这对于飞行控制软件的开发和调试非常有用,因为它提供了一个安全且成本效益高的方法来测试新的功能和算法。
参考链接:https://ardupilot.org/dev/docs/building-setup-linux.html
(4)安装 MAVProxy(辅助工具)
我建议在需要 MAVlink 协议的情况下使用外部代理。MAVProxy 可以将来自输入端口的任何 MAVLink 消息转发到其他 TCP/UDP/串行端口。如果您要为两个或更多的 GCS 或控制器节点使用一个车辆,这将非常有用。只需执行以下命令安装:
pip install MAVProxy - 使用pip在Python2中安装 MAVProxy
(5)安装 ROS
ROS是面向机器人的半操作系统。ROS通常支持多种编程语言,如C++、Python、Javascript等。它是免费且易于使用的。到目前为止,ROS有三个支持的版本(kinetic、melodic和neotic),我在本文档中更喜欢使用melodic版本。要安装ROS-melodic,有两种方法:从预构建的二进制文件安装或从源代码安装。我倾向于安装完整版本的ros-melodic。如果你不是使用Ubuntu,可能会在按照ROS教程中提到的二进制文件安装ROS时遇到一些问题,因为这个过程适用于任何类型的Linux平台。
要从源代码安装ROS-melodic,你可以参考这个链接。
要从二进制文件安装ROS-melodic,你可以参考这个链接。
(6)安装 MAVROS
如果您想从二进制文件安装 ROS,建议也从二进制文件安装 MAVROS。
A.从二进制文件安装 MAVROS
对于这一部分,你可以参考这个链接。
为了方便起见,以下是从二进制文件安装MAVROS所需执行的命令:
(还包括安装各种依赖)
sudo apt-get install ros-melodic-mavros ros-melodic-mavros-extras
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
chmod a+x install_geographiclib_datasets.sh
./install_geographiclib_datasets.sh
chmod a+x 是一个命令,用于修改文件或目录的权限,使其具有可执行权限。
chmod: 是用于修改文件或目录权限的命令。-
a+x
: 表示将所有用户(包括所有者、组和其他用户)赋予可执行权限。其中:
- `a` 表示所有用户。
- `+x` 表示添加可执行权限。
B.从源安装 MAVROS
如果你不使用Ubuntu,强烈建议从源代码安装MAVROS,因为各种Linux发行版之间的相似性。你可以参考这个链接获取完整的文档。以下是摘要命令:
source <ROS_INSTALL_PATH>/devel/setup.bash - 定义ROS的安装文件夹(你可以将此命令插入到~/.bashrc文件的底部,以便在打开新shell时自动运行此命令。可以使用以下命令进行此操作:sudo nano ~/.bashrc)
roscore - 启动ros核心以访问其功能和内置包
sudo apt-get install python-catkin-tools python-rosinstall-generator -y - 安装与ROS相关的python包
cd ~/my_catkin_ws/src - 跳转到catkin src文件夹
git clone https://github.com/ros-geographic-info/unique_identifier.git - 克隆unique_identifier包
git clone https://github.com/ros-geographic-info/geographic_info.git - 克隆geographic_info包
cd ~/my_catkin_ws - 跳转到catkin文件夹
catkin init - 初始化catkin工作空间
wstool init src - 初始化ros包安装程序
rosinstall_generator --rosdistro melodic mavlink | tee /tmp/mavros.rosinstall - 安装MAVLink(我们使用melodic参考来处理所有ROS发行版,因为它不是特定于发行版的,并且是最新的)
rosinstall_generator --upstream mavros | tee -a /tmp/mavros.rosinstall - 安装MAVROS:获取源代码(上游 - 已发布)
wstool merge -t src /tmp/mavros.rosinstall - 创建工作空间和依赖关系
wstool update -t src -j4 - 构建ros工作空间
rosdep install --from-paths src --ignore-src -y - 安装ros包
./src/mavros/mavros/scripts/install_geographiclib_datasets.sh - 安装GeographicLib数据集
catkin build - 构建源代码
source devel/setup.bash - 使用工作空间的setup.bash或setup.zsh,以便rosrun可以从该工作空间找到节点
(7)启动 Rover 机器人
启动 Ardupilot-SITL 模拟 Rover
在进行 Ardupilot 安装文件夹的 ardupilot/Tools/autotest/ 目录下:
cd <你的Ardupilot安装文件夹>/ardupilot/Tools/autotest/
启动 Rover 车辆:
python sim_vehicle.py -v Rover
请注意,不要使用 python3 来运行或构建 MAVProxy,因为在该包中存在与 MAVProxy 模块(如 “map” 和 “console”)不匹配的问题。
如果要显示其他 SITL 模块,如地图(map)或控制台(console),可以使用以下命令:
python sim_vehicle.py -v Rover --map --console
或者,您可以在 SITL 终端中加载它们:
module load map
module load console
注意:当 Ardupilot 首次编译机器人时,请耐心等待。这需要 2-3 分钟来完成。
您会注意到 ardupilot-sitl 创建了一些输出,例如 “127.0.0.1:14550” 和 “127.0.0.1:14551”。这些是用于将此车辆与另一个 MAVProxy 控制台进行通信的辅助 UDP 端口。我们在示例中使用这些端口。
(9)连接 Rover 到 MAVROS
首先,您需要配置 ROS 和 MAVROS。
如果您已经从二进制文件安装了它们,请按照以下命令操作:
source /opt/ros/melodic/setup.bash - 定义 ROS 和 MAVROS 的安装文件夹路径
或者,如果您是从源代码安装的,请执行以下命令:
source <ROS_INSTALL_PATH>/devel/setup.bash - 定义 ROS 的安装文件夹路径(您可以将此命令插入到 ~/.bashrc 文件的末尾,以便在打开新的 shell 时自动运行此命令。可以使用以下命令打开 ~/.bashrc 文件:sudo nano ~/.bashrc)
source <MAVROS_INSTALL_PATH>/devel/setup.bash - 定义 MAVROS 的安装文件夹路径(您可以将此命令插入到 ~/.bashrc 文件的末尾,以便在打开新的 shell 时自动运行此命令。可以使用以下命令打开 ~/.bashrc 文件:sudo nano ~/.bashrc)
然后,是启动 ROS 核心的时间:
roscore - 启动 ROS 核心,用于访问其功能和构建的包
随后,您需要告诉 MAVROS 如何找到您要使用的车辆:
roslaunch mavros apm.launch fcu_url:=udp://:14550@ - 将来自 UDP:14550 端口的车辆连接到 MAVROS
或者,如果您想通过远程 TCP 端口连接到您的机器人,可以使用以下命令:
roslaunch mavros apm.launch fcu_url:=tcp://<REMOTE_HOST>:<TCP_PORT>@ - 将来自 REMOTE_HOST:TCP_PORT 端口的车辆连接到 MAVROS
(10)查看 ROS 主题
source <ROS_INSTALL_PATH>/devel/setup.bash
这条命令用于设置 ROS 的安装路径(请将 <ROS_INSTALL_PATH> 替换为实际的 ROS 安装路径)。您可以将此命令插入到 ~/.bashrc 文件的末尾,以便在打开新的 shell 时自动运行此命令。可以使用以下命令编辑 ~/.bashrc 文件:
sudo nano ~/.bashrc
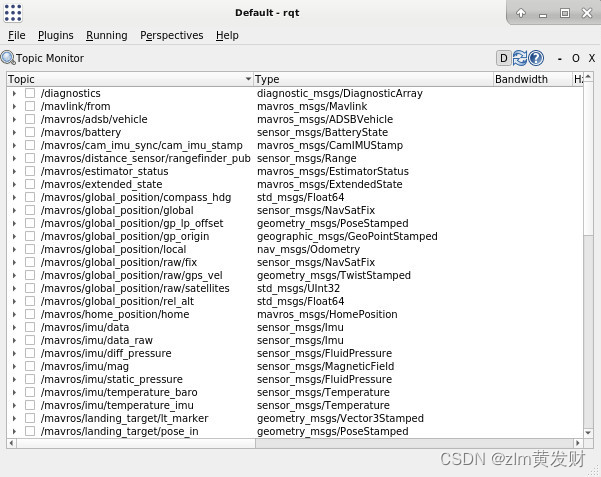
接着执行以下命令来启动 ROS 的插件监控窗口:
rqt
然后,在显示的 rqt 窗口中,从菜单中选择 “Plugins” > “Topics” > “Topic Monitor” 来开始主题监视。这将显示如下底部的图形界面:
3.第1章 ArduRover 使用命令行界面(CLI)
(1)步骤1 如何更改模式
A.初始化
请按照此链接中提到的步骤操作。
B-1.使用 MAVProxy 或 Ardupilot-SITL 更改车辆模式
获取模式:
如果要查看车辆的最后模式,您只需查看这些终端中的 “>” 字符之前的名称。
设置模式:
如果要更改模式,您可以直接从由 MAVProxy 或 SITL 提供的终端发送命令。例如,如果要将车辆模式更改为 “GUIDED”,可以输入以下命令:
GUIDED - 更改模式为 GUIDED
您还可以通过以下命令查看车辆的所有可用模式:
mode - 显示所有可用模式
B-2.使用 ROS rqt 更改车辆模式:
首先,您需要从 rqt 中添加两个插件:
Plugins -> Topics -> Topic Monitor
Plugins -> Services -> Service Caller
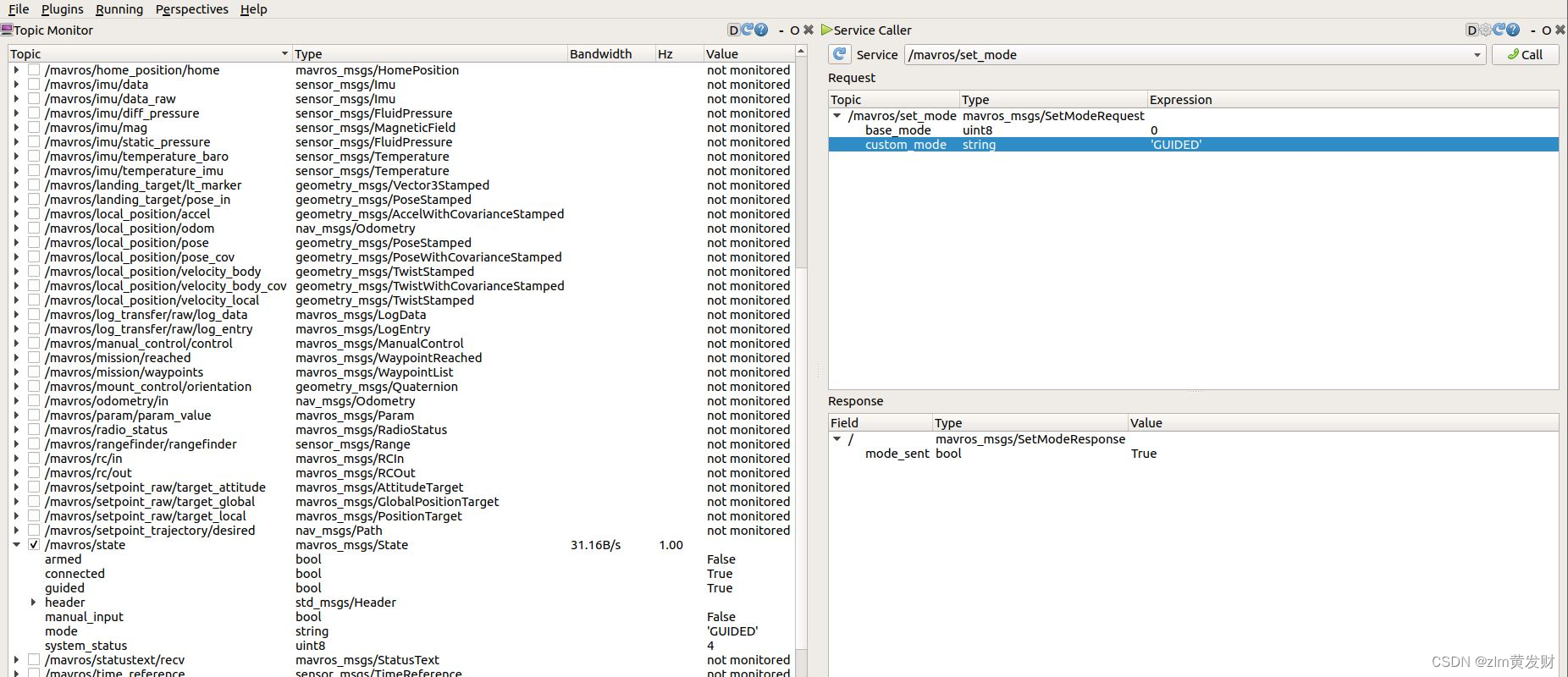
然后在 “Topic Monitor” 部分,您需要勾选 “/mavros/state” 主题以查看其内容,从而可以获取车辆模式以及其他参数,如 arm status 和 Guided status。
接下来,在 “Service Caller” 部分,选择 /mavros/set_mode,然后在 “custom_mode” 字段中设置您的车辆模式。然后点击 “call” 按钮发送此消息。结果应如下所示:
B-3.使用 ROS 命令行更改车辆模式
获取模式
如果您想查看车辆的最后模式,只需键入以下命令:
rostopic echo /mavros/state - 定期返回 /mavros/state 主题的所有内容
结果应类似于以下内容
header:
stamp:
secs: 1595198641
nsecs: 651358095
frame_id: ''
connected: True
guided: False
manual_input: True
mode: "MANUAL"
system_status: 4
您可以在结果中的 “mode” 字段中找到模式。
设置模式
您需要调用一个 ROS 服务来执行此操作。只需按照以下命令操作:
rosservice info /mavros/set_mode - 查看其参数和消息类型
此命令将返回以下结果:
Node: /mavros
URI: rosrpc://ubuntu:42571
Type: mavros_msgs/SetMode
Args: base_mode custom_mode
mavros_msgs/SetMode 是此服务的 srv 文件类型,“Args” 是我们的输入参数,但是我们需要知道它们的类型,因此我们输入以下命令:
rossrv show mavros_msgs/SetMode- 获取所述 srv 文件的详细信息
结果如下所示:
uint8 MAV_MODE_PREFLIGHT=0
uint8 MAV_MODE_STABILIZE_DISARMED=80
uint8 MAV_MODE_STABILIZE_ARMED=208
uint8 MAV_MODE_MANUAL_DISARMED=64
uint8 MAV_MODE_MANUAL_ARMED=192
uint8 MAV_MODE_GUIDED_DISARMED=88
uint8 MAV_MODE_GUIDED_ARMED=216
uint8 MAV_MODE_AUTO_DISARMED=92
uint8 MAV_MODE_AUTO_ARMED=220
uint8 MAV_MODE_TEST_DISARMED=66
uint8 MAV_MODE_TEST_ARMED=194
uint8 base_mode
string custom_mode
---
bool mode_sent
在这种情况下,custom_mode是需要配置的参数,其类型为 string。例如,如果您想将车辆模式更改为 GUIDED,请执行以下命令:
rosservice call /mavros/set_mode "custom_mode: 'GUIDED'" - 将车辆模式更改为 “GUIDED”
另一种方法是使用 “rosrun” 命令:
rosrun mavros mavsys mode -c MANUAL - 如果要更改模式为 “MANUAL”
rosrun mavros mavsys mode -b <ENUM VALUE> - 如果要使用 “base_mode” 更改模式
(2)步骤2 如何解锁和上锁(arm)
请按照此链接中提到的步骤操作
A.使用 MAVProxy 或 Ardupilot-SITL 进行武装和解除武装
您可以直接从 MAVProxy 或 SITL 提供的终端发送命令。
为此,只需输入以下命令:
arm throttle - 此命令用于解锁机器人
disarm - 此命令用于锁定机器人
B.使用 ROS rqt 进行武装和解除武装
首先你需要从 rqt 添加两个插件:
Plugins -> Topics -> Topic Monitor
Plugins -> Services -> Service Caller
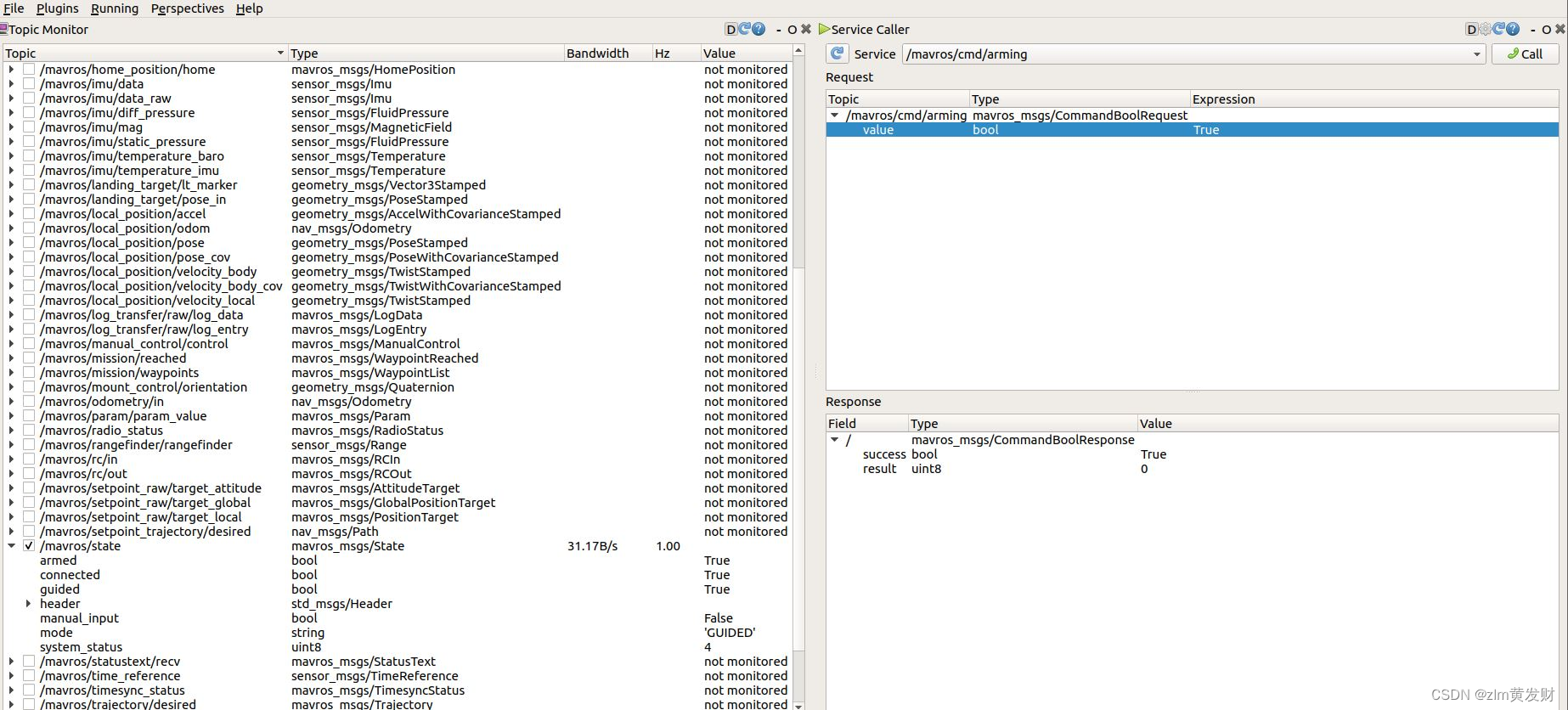
首先在Topic Monitor选项卡中,勾选/mavros/state话题以查看其内容,这样您就可以获取飞行器的模式以及其他参数,比如arm状态和引导状态。
然后在Service Caller选项卡中,选择/mavros/cmd/arming服务,在value字段中设置您的arm状态为布尔类型变量(False/True)。然后点击“call”按钮发送此消息。结果应如下所示:
C.使用 ROS 命令行进行武装和解除武装
1- 监控 Rover 的总体状态(武装状态和模式名称)
如果您想查看MAVROS中您的ardupilot机器人的总体状态
您需要了解MAVROS创建的所有话题:
rostopic list - 返回所有可用的话题
然后您可以看到机器人的每个部分都被映射到一个特定的话题上。为了显示机器人的解锁状态,您必须使用/mavros/state话题:
rostopic echo /mavros/state - 定期返回/mavros/state话题的所有内容
结果应该类似于这样:
---
header:
stamp: 09
secs: 1595198641
nsecs: 651358095
frame_id: ''
connected: True
guided: False
manual_input: True
mode: "MANUAL"
system_status: 4
---
命令rostopic echo将每隔一秒返回主题的所有内容。在这种情况下,“已连接”字段显示您的 MAVROS 仍然连接到机器人。 “模式”还显示当时车辆模式的名称。
2- 向机器人发送武装/解除武装命令
这里是翻译的内容:
只需按照以下命令操作:
rosservice call /mavros/cmd/arming True - 发送解锁命令给机器人
rosservice call /mavros/cmd/arming False - 发送锁定命令给机器人
另一种方法是使用 “rosrun” 命令:
rosrun mavros mavsafety arm- 发送解锁命令给机器人
rosrun mavros mavsafety disarm - 发送锁定命令给机器人
(3)步骤3 如何进行移动
A.初始化
请按照这个链接中提到的步骤操作。然后,您需要按照这个链接中的说明将您的车辆模式更改为GUIDED,然后您可以使用其中一个链接中提到的方法对机器人进行解锁。然后,根据这里描述的步骤移动您的车辆。
B.使用 MAVProxy 或 Ardupilot-SITL 移动您的车辆
我们假设您的车辆处于GUIDED模式,如果不是,请按照此页面上“初始化”部分提到的链接进行操作。然后,使用 MAVProxy 或 SITL 中的以下命令移动您的车辆:
GUIDED 纬度 经度 高度 - 将车辆移动到指定的目的地
参数 (纬度, 经度, 高度) 是用来确定车辆目的地的位置参数。
如果您想要停止车辆移动,您需要使用以下命令:
mode HOLD - 停止车辆运动
此外,还有其他一些模式可以使车辆移动,例如“RTL”、“MANUAL”等。请参考此链接获取更多信息。
C.使用 ROS rqt 移动您的车辆
我们假设您的车辆处于GUIDED模式,如果不是,请按照此页面上“初始化”部分提到的链接进行操作。然后,您需要从rqt中添加以下插件:
Plugins -> Topics -> Message Publisher
然后,您需要添加一个话题,地址为/mavros/setpoint_raw/global,点击“+”进行添加。接着,您需要更改位置的数值(“纬度”、“经度”、“海拔”),以设定车辆的目标位置。然后勾选该话题以便每隔1秒发布一次(此间隔可以更改),或者右键点击该话题,然后选择Publish Selected Once仅发布一次。然后您就可以看到您的车辆移动到指定的目的地了。
D.使用 ROS 命令行更改车辆模式
您需要通过以下命令发布目标位置:
指定经度和纬度:
rostopic pub /mavros/setpoint_raw/global mavros_msgs/GlobalPositionTarget -1 "{'longitude': 14.51218, 'latitude': 10.15785}"
如果您只想指定纬度(经度为0):
rostopic pub /mavros/setpoint_raw/global mavros_msgs/GlobalPositionTarget -1 "{'latitude': 10.15785}"
这里的 “-1” 表示该命令只发布一次。如果您想定期发布这条消息,您可以删除 “-1” 参数,并使用 -r RATE参数来指定发布频率:
rostopic pub /mavros/setpoint_raw/global mavros_msgs/GlobalPositionTarget -r 1 "{'longitude': 14.51218, 'latitude': 10.15785}"
这将以1 Hz的频率发布指定目的地的消息,使车辆移动到指定位置。
(4)步骤4 如何设置和获取参数
A.初始化
请按照此链接中提到的步骤操作
B.使用 MAVProxy 或 Ardupilot-SITL 获取/设置 MAVROS 参数
如果您想设置参数,可以使用以下命令:
param set PARAMETER VALUE - 设置参数的新值
如果您想获取参数的值,可以使用以下命令之一:
param fetch PARAMETER - 获取参数的值
param show PARAMETER - 获取参数的值
例如,如果您想将CRUISE_SPEED作为您的参数,并设置或获取它的值,可以使用以下命令:
设置参数值:
param set CRUISE_SPEED 20 - 设置参数的新值
获取参数值:
param fetch CRUISE_SPEED - 获取参数的值
或者
param show CRUISE_SPEED - 获取参数的值
这些命令允许您设置和获取特定参数的值。
C.使用 ROS rqt 获取/设置 MAVROS 参数
首先,您需要从 rqt 中添加两个插件:
Plugins -> Services -> Service Caller
如果您想设置参数,然后在 Service Caller部分,您需要选择 /mavros/param/set,然后在param_id字段中输入您要设置的参数名称,在integer或 real字段中设置该参数的新值。然后点击 call按钮发送此消息。以参数CRUISE_SPEED 为例,设置参数的结果应如下所示:
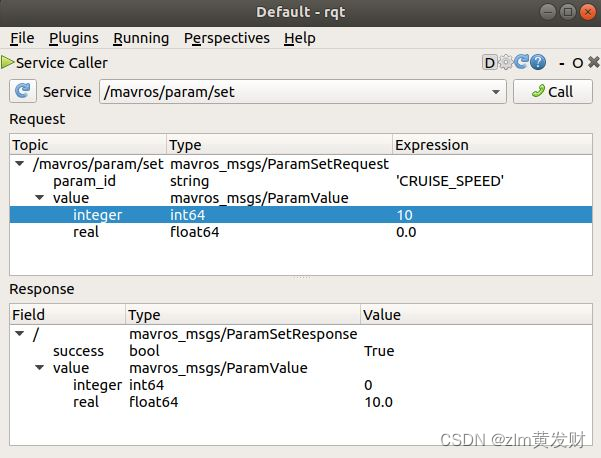
正如您所看到的输出,包含一个名为 success的布尔类型字段(False/True),表示此过程是否成功完成。此外,新值将显示在屏幕上,如您所见。
请注意,当您的值为整数格式时,integer和 real 之间没有任何区别。
如果您想设置参数,则在Service Caller 部分,您需要选择 /mavros/param/get,然后在 param_id字段中输入您要设置的参数名称,在integer" 或 "real字段中设置该参数的新值。然后点击 call按钮发送此消息。以参数 CRUISE_SPEED为例,设置参数的结果应如下所示:
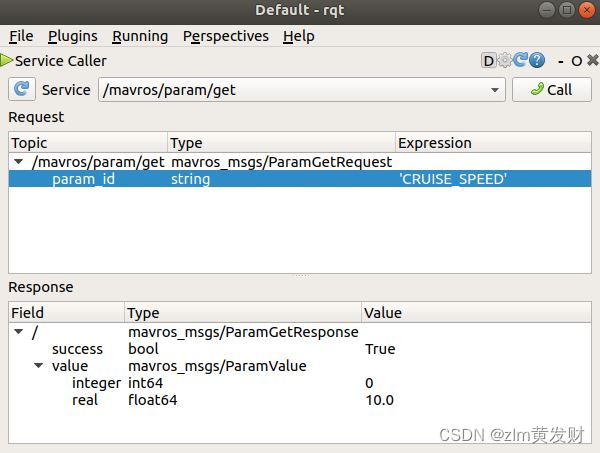
正如您所看到的,输出构成了一个 bool 类型(False/True)的“成功”字段,并指示此过程是否成功完成。如您所见,该参数的新值也将显示在该屏幕上。
D.使用 ROS 命令行更改车辆模式
如果您想设置参数值,您需要调用一个ROS服务来执行此操作。请按照以下命令操作:
查看服务的详细信息:
rosservice info /mavros/param/set - 查看此服务的详细信息
这个命令将给出如下结果:
Node: /mavros
URI: rosrpc://ubuntu:58491
Type: mavros_msgs/ParamSet
Args: param_id value
mavros_msgs/ParamSet 是此服务的服务消息类型,Args是我们的输入参数,但我们需要知道它们的类型,因此我们执行以下命令:
rossrv show mavros_msgs/ParamSet - 获取所述服务文件的详细信息
这将得到以下结果:
string param_id
mavros_msgs/ParamValue value
int64 integer
float64 real
---
bool success
mavros_msgs/ParamValue value
int64 integer
float64 real
在这种情况下,param_id是需要配置的参数名称,其类型为string。此外,integer和 real是描述此参数值的字段。
要使用新值设置参数,请运行以下命令:
rosservice call /mavros/param/set "{'param_id':'PARAM', 'value':[INTEGER_VALUE, REAL_VALUE]}" - 更改参数的值
例如,对于参数 CRUISE_SPEED:
rosservice call /mavros/param/set "{'param_id':'CRUISE_SPEED', 'value':[20, 0]}" - 更改参数的值
如果您想获取参数的值,请运行以下命令:
rosservice call /mavros/param/get "{'param_id':'PARAM'}" - 更改车辆模式为 "GUIDED"
例如,对于参数 CRUISE_SPEED:
rosservice call /mavros/param/get "{'param_id':'CRUISE_SPEED'}" - 获取参数的值
使用以下 rosrun 命令更改车辆模式:
rosrun mavros mavparam set PARAM VALUE - 将 PARAM 的值更改为 VALUE
rosrun mavros mavparam get PARAM - 返回 PARAM 的值
这些命令可以帮助您设置和获取参数的值,以及更改车辆模式。
4.第2章 ArduRover 使用 Python
(1)步骤1 驾驶 rover
A.初始化:
请按照此链接中提到的步骤操作
B.需求:
您只需使用以下命令克隆 mavros_python_examples:
git clone https://www.github.com/masoudir/mavros_python_examples
cd mavros_python_examples
或者您可以通过 pip 轻松安装此包
pip3 install mavros_python_examples
C.如何使用:
“mavros_python_examples” 包含一个测试文件,展示了使用该软件包驾驶小车的最简单方法。要访问此文件,请参考 “/test/rover.py”,如果您尚未克隆此项目,也可以通过以下命令下载该代码:
wget https://github.com/masoudir/mavros_tutorial/test/rover.py
该文件的内容如下:
**
在驾驶您的Rover并使其移动之前,您需要按照这里的说明进行操作,然后运行以下命令:
如果您已经克隆了此软件包:
python3 test/rover.py
如果您通过 pip3 安装了此软件包:
python3 rover.py
您将看到您的车辆模式更改为 GUIDED,然后机器人将被解锁并移动到指定点。
要了解更多关于此软件包的详细信息,请参考此链接。
(2)步骤2 详细信息-Python
A.初始化
该包由四个不同的 python 类组成,可以轻松地使用 Ardupilot 车辆。
此处描述了这些类。
B-1.解释细节——定义TOPICS和SERVICES类
首先,我们创建了一个名为TopicService的类,如下所示,以便更轻松地定义主题和服务:
class TopicService:
def __init__(self, name: str, classType):
self.__name = name
self.__classType = classType
self.__data = None
def set_data(self, data):
self.__data = data
def get_data(self):
return self.__data
def get_type(self):
return self.__classType
def get_name(self):
return self.__name
正如您所看到的,在这个类中定义了三个参数:
name指向 TOPIC 或 SERVICE 的名称,classType指向所使用的类的类型,data指向此 TOPIC 或 SERVICE 的内容。
B-2. 定义处理 ROS 主题和服务的类
我们 定义了一个名为 “RosHandler” 的第二个类,用于在 ROS 环境中更轻松地处理 TOPICS 和 SERVICES。该类的内容如下所示:
class RosHandler:
def __init__(self):
self.rate = 1
self.connected = False
def connect(self, node: str, rate: int):
rospy.init_node(node, anonymous=True)
self.rate = rospy.Rate(rate)
self.connected = True
rospy.loginfo("Rospy is up ...")
rospy.spin()
def disconnect(self):
if self.connected:
rospy.loginfo("shutting down rospy ...")
rospy.signal_shutdown("disconnect")
self.connected = False
@staticmethod
def topic_publisher(topic: TopicService):
pub = rospy.Publisher(topic.get_name(), topic.get_type(), queue_size=10)
pub.publish(topic.get_data())
print("edfgedge")
@staticmethod
def topic_subscriber(topic: TopicService):
rospy.Subscriber(topic.get_name(), topic.get_type(), topic.set_data)
@staticmethod
def service_caller(service: TopicService, timeout=30):
try:
srv = service.get_name()
typ = service.get_type()
data = service.get_data()
rospy.loginfo("waiting for ROS service:" + srv)
rospy.wait_for_service(srv, timeout=timeout)
rospy.loginfo("ROS service is up:" + srv)
call_srv = rospy.ServiceProxy(srv, typ)
return call_srv(data)
except rospy.ROSException as e:
print("ROS ERROR:", e)
except rospy.ROSInternalException as e:
print("ROS ERROR:", e)
except KeyError as e:
print("ERROR:", e)
return None
在使用 MAVROS 连接到车辆之前,请小心执行topic_subscriber()函数。此函数创建一个用于从 ROS 接收数据的事件处理程序。
然后,您可以使用connect()函数连接到您的车辆。该函数接受两个参数name和 rate,分别是由此代码建立的 ROS 节点的名称以及从 ROS TOPICS 接收数据的速度。
请注意,从每个 topic 接收数据的实际速率直接关联到该 topic 中定义的速率。这意味着,如果特定 topic 的频率为 40 Hz,您可以在 “connect()” 函数中使用的速率之下更新其数据。
您可以通过 “topic_publisher()” 函数发布您的 topics,也可以通过 “service_caller” 函数发送您的服务命令。
B-3. 定义使用 Rover 功能的类
为了使用Rover车辆,我们需要定义它的主题和服务,并定义如何使用它们的规则。这些是在此类上完成的,如下所示:
class RoverHandler(RosHandler):
def __init__(self):
super().__init__()
self.armed = False
self.mode = ""
self.TOPIC_STATE = TopicService("/mavros/state", mavros_msgs.msg.State)
self.SERVICE_ARM = TopicService("/mavros/cmd/arming", mavros_msgs.srv.CommandBool)
self.SERVICE_SET_MODE = TopicService("/mavros/set_mode", mavros_msgs.srv.SetMode)
self.SERVICE_SET_PARAM = TopicService("/mavros/param/set", mavros_msgs.srv.ParamSet)
self.SERVICE_GET_PARAM = TopicService("/mavros/param/get", mavros_msgs.srv.ParamGet)
self.TOPIC_SET_POSE_GLOBAL = TopicService('/mavros/setpoint_raw/global', mavros_msgs.msg.GlobalPositionTarget)
self.thread_param_updater = threading.Timer(0, self.update_parameters_from_topic)
self.thread_param_updater.daemon = True
self.thread_param_updater.start()
def enable_topics_for_read(self):
self.topic_subscriber(self.TOPIC_STATE)
def arm(self, status: bool):
data = mavros_msgs.srv.CommandBoolRequest()
data.value = status
self.SERVICE_ARM.set_data(data)
result = self.service_caller(self.SERVICE_ARM, timeout=30)
return result.success, result.result
def change_mode(self, mode: str):
data = mavros_msgs.srv.SetModeRequest()
data.custom_mode = mode
self.SERVICE_SET_MODE.set_data(data)
result = self.service_caller(self.SERVICE_SET_MODE, timeout=30)
return result.mode_sent
def move(self, lat: float, lon: float, alt: float):
data = mavros_msgs.msg.GlobalPositionTarget()
data.latitude = lat
data.longitude = lon
data.altitude = alt
self.TOPIC_SET_POSE_GLOBAL.set_data(data)
self.topic_publisher(topic=self.TOPIC_SET_POSE_GLOBAL)
def get_param(self, param: str):
data = mavros_msgs.srv.ParamGetRequest()
data.param_id = param
self.SERVICE_GET_PARAM.set_data(data)
result = self.service_caller(self.SERVICE_GET_PARAM, timeout=30)
return result.success, result.value.integer, result.value.real
def set_param(self, param: str, value_integer: int, value_real: float):
data = mavros_msgs.srv.ParamSetRequest()
data.param_id = param
data.value.integer = value_integer
data.value.real = value_real
self.SERVICE_SET_PARAM.set_data(data)
result = self.service_caller(self.SERVICE_SET_PARAM, timeout=30)
return result.success, result.value.integer, result.value.real
def update_parameters_from_topic(self):
while True:
if self.connected:
data = self.TOPIC_STATE.get_data()
self.armed = data.armed
self.mode = data.mode
这是一个名为 “RoverHandler” 的类,继承自 “RosHandler” 类,用于处理在 ROS 环境中更容易操作的 TOPICS 和 SERVICES。
该类包含以下方法:
enable_topics_for_read():启用对 “/mavros/state” 主题的订阅,以便读取车辆状态数据。arm(status: bool):控制车辆的武器状态,将参数status设置为True表示解锁车辆,设置为False表示锁定车辆。change_mode(mode: str):更改车辆的模式,将参数mode设置为所需的模式名称(例如 “GUIDED”)。move(lat: float, lon: float, alt: float):移动车辆到指定的全局位置,参数lat、lon、alt分别表示目标位置的纬度、经度和海拔高度。get_param(param: str):获取指定参数的值,参数param是要获取值的参数名称。set_param(param: str, value_integer: int, value_real: float):设置指定参数的值,参数param是要设置值的参数名称,value_integer是整数值,value_real是浮点数值。update_parameters_from_topic():持续监听 “/mavros/state” 主题,更新车辆的武器状态和模式信息。
此类提供了方便的方法来操作与车辆状态、模式、参数和位置相关的ROS TOPICS和SERVICES。
正如您所看到的,使用 “TopicService” 类定义了一些 TOPICS 和 SERVICES:
-
Topic
/mavros/state用于读取车辆的整体状态,其类类型为 “mavros_msgs.msg.State”(Python 中的类型)。 -
Topic
/mavros/setpoint_raw/global用于发布车辆移动的目标位置,其类类型为 “mavros_msgs.msg.GlobalPositionTarget”(Python 中的类型)。 -
Service
/mavros/cmd/arming用于解锁/锁定车辆,其类类型为 “mavros_msgs.srv.CommandBool”(Python 中的类型)。 -
Service
/mavros/set_mode用于更改车辆模式,其类类型为 “mavros_msgs.srv.SetMode”(Python 中的类型)。 -
Service
/mavros/param/set用于设置车辆参数,其类类型为 “mavros_msgs.srv.ParamSet”(Python 中的类型)。 -
Service
/mavros/param/get用于获取车辆参数,其类类型为 “mavros_msgs.srv.ParamGet”(Python 中的类型)。
这些 TOPICS 和 SERVICES 允许您通过 ROS 与车辆进行交互,从而读取状态、控制动作以及设置参数等。
(3)步骤3 如何使用-Python
C-1.如何使用——(初始化):
请按照此链接中提到的步骤操作
C-2.如何使用——(需求):
import threading
import time
from mavHandler.roverHandler import *
class MyRoverHandler(RoverHandler):
def __init__(self):
super().__init__()
self.user_thread = threading.Timer(0, self.user)
self.user_thread.daemon = True
self.user_thread.start()
def user(self):
while True:
time.sleep(1)
print("arm:", self.armed, "mode:", self.mode)
print("set param:", self.set_param("CRUISE_SPEED", 2, 0))
if self.connected:
print("get param:", self.get_param("CRUISE_SPEED"))
print("set param:", self.set_param("CRUISE_SPEED", 10, 0))
self.change_mode(MODE_GUIDED)
self.arm(True)
self.move(50.15189, 10.484885, 0)
if __name__ == "__main__":
v = MyRoverHandler()
v.enable_topics_for_read()
v.connect("node1", rate=10)
这段代码定义了一个名为 MyRoverHandler 的类,它继承自 RoverHandler 类,并添加了一个名为 user 的方法,用于模拟用户操作。
在 __init__ 方法中,通过调用 super().__init__() 来初始化基类 RoverHandler。然后创建了一个名为 user_thread 的定时器线程,在定时器线程中启动了 user 方法。
在 user 方法中,通过一个无限循环(while True)定期执行以下操作:
- 每隔一秒打印当前车辆的武器状态 (
armed) 和模式 (mode)。 - 调用
set_param方法来设置名为 “CRUISE_SPEED” 的参数值为 2(整数)和 0(浮点数),并打印设置结果。 - 如果已连接到车辆(
self.connected为True):- 调用
get_param方法获取名为 “CRUISE_SPEED” 的参数值,并打印获取结果。 - 再次调用
set_param方法将 “CRUISE_SPEED” 参数值设置为 10(整数)和 0(浮点数),并打印设置结果。 - 调用
change_mode方法将车辆模式设置为MODE_GUIDED。 - 调用
arm方法将车辆解锁(True)。 - 调用
move方法将车辆移动到指定的全局位置(纬度为 50.15189,经度为 10.484885,海拔高度为 0)。
在__main__块中:
- 调用
- 创建了一个名为
v的MyRoverHandler实例。 - 调用
enable_topics_for_read方法以启用对 “/mavros/state” 主题的订阅。 - 调用
connect方法连接到 ROS 节点(节点名称为 “node1”),并设置数据接收速率为 10 Hz。
这段代码的主要作用是模拟用户操作,通过调用 RoverHandler 类中定义的方法来控制车辆的状态、参数和移动。在后台定时打印和设置车辆状态和参数,以及执行移动操作。
要运行您的代码,请按照此链接中提到的说明将 ROS 函数引入到此代码中(请确保在当前终端中设置 ROS 和 MAVROS 的路径以使用该代码)。然后,如果您使用 git 下载了此项目,就可以运行您的代码。
此代码将创建一个名为 “node1” 的节点,然后将其连接到您通过之前步骤启动的 ArduRover 车辆。接着,它将把 “CRUISE_SPEED” 参数的值设置为 2,然后将车辆模式更改为 “GUIDED”。然后,它将解锁车辆,最后强制车辆移动到目标位置 {“lat”: 50.15189, “lon”: 10.484885}。















 2152
2152











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









