






蜘蛛丝因其优异的力学性能和良好的生物相容性,近年来一直受到研究人员的广泛关注。
2024年10月30日温州医科大学彭政、温睿老师团队在Biochimie杂志上发表了题为“Mechanical and structural features of three AcSp proteins underlie thediverse material properties of aciniform silks of Neoscona spiders”的论文。
启衡星明星产品—StarPure Gel Purification Kit胶纯化试剂盒有幸参与其中!
1、研究背景
研究发现,圆网蜘蛛具有 7 种类型的产丝腺体,能够分泌 6 种丝纤维以及一种湿胶,而且每种丝纤维都表现出独特的生物学功能和材料学特性。这些丝纤维中,葡萄状腺丝具有最强的韧性,它结合了高延展性(86 ± 3 %)和强度(687 ± 56 MPa),使其非常适合于猎物固定和形成卵袋内部结构。确定葡萄状腺丝极高韧性的分子基础是理解仿生研究的关键,旨在创造这种超坚韧丝的优良材料性能。

文献解读
研究人员从类青新圆蛛Neoscona scylloides的葡萄状腺丝中鉴定了三个主要蛛丝蛋白(AcSp1A、AcSp1B和AcSp2),并给出了它们的全长编码基因序列(图1)。序列比较发现,与其他蜘蛛类似,这三种AcSp也有相对较短且保守的非重复N端和C端区域,这些区域位于一个较长的中心重复区域的旁边。虽然不同AcSp中心重复序列之间的长度和序列存在差异,但是他们都具有复杂性和极端的基因内均质化的特征(图5)。
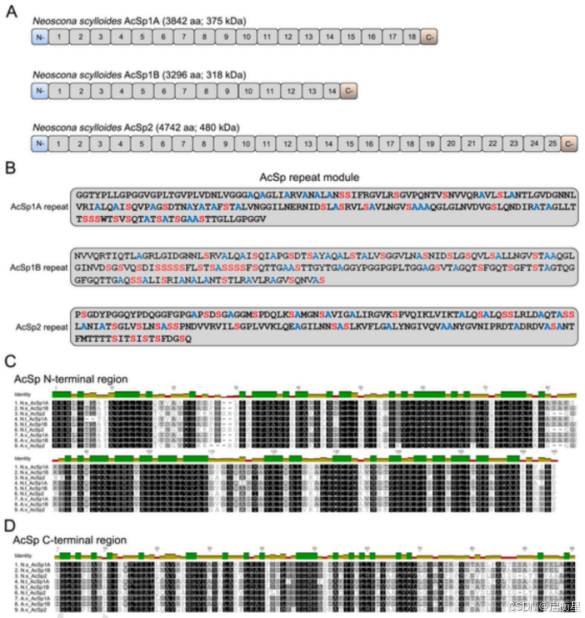
图1.AcSp1A、AcSp1B和AcSp2的序列和结构模型。
表达水平分析表明,三个AcSp mRNA水平在葡萄状腺中远比其他腺体内高,其中AcSp1B的表达水平最高,其丝氨酸含量高于其他两种AcSp蛋白,而AcSp2的mRNA水平很低(图2)。Swiss模型程序预测了N. theisi, N. scylloides, and A. ventricosus的AcSp末端结构域的三级结构并对其质量和可靠性做了评估。所有AcSp N端区域均符合5个螺旋域的典型蜘蛛蛋白三级结构(图3A)。与已知蛛丝蛋白的结构的相似度一致(图3B)。同时C端域三级结构预测结果为具有四个螺旋的反平行二聚体,这与已知C末端结构一致为(图3A和B)
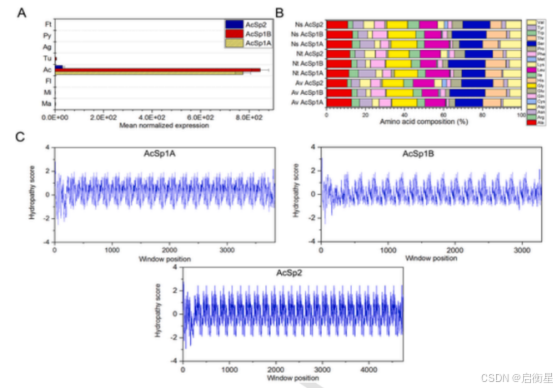
图2.AcSp1A、AcSp1B和AcSp2的表达、氨基酸组成和亲水性
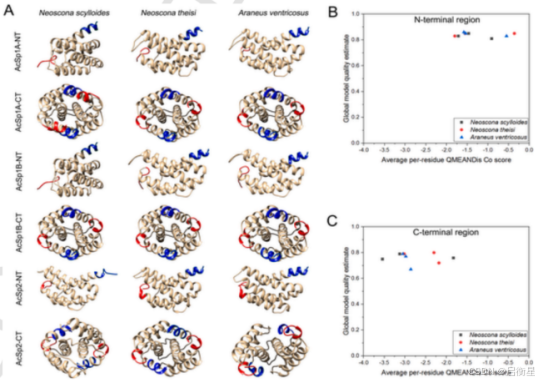
图3.来自A. ventricosus, N. theisi, and N. scylloides.的AcSp1A、AcSp1B和AcSp2的末端区域的Swiss模型
此外,研究人员还表达了三种重组AcSp蛋白,这些蛋白可以在生理缓冲液中通过剪切力诱导形成纤维(图4)。力学性能测试结果显示三种重组纤维具有相似的延展性,但NRCAcSp1B纤维比其他两种纤维具有更高的拉伸强度,使其韧性显著提高(图5)。FTIR光谱法测定二级结构含量发现三种重组纤维中NRCAcSp1B纤维的β-sheet含量最高,这与其含有丰富的丝氨酸有关。较多的β-sheet 是AcSp1B的纤维在三种AcSp重组纤维中具有最强的拉伸强度的原因。与手工拉伸纤维相比,天然纤维的直径更小(<1μm)(表1)。研究人员通过不同来源(N. theisi and N. scylloides)纤维的力学性能比较,发现N. theisi来源的纤维拉伸强度高于N. scylloides来源的纤维(表1),这可能是由于两种AcSp1蛋白的表达水平不同所致。
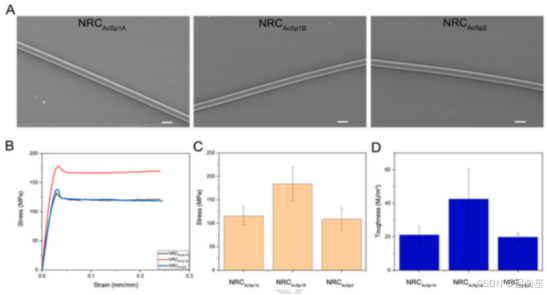
图4. 三种重组纤维的形态学表征和力学性能。
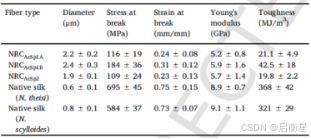
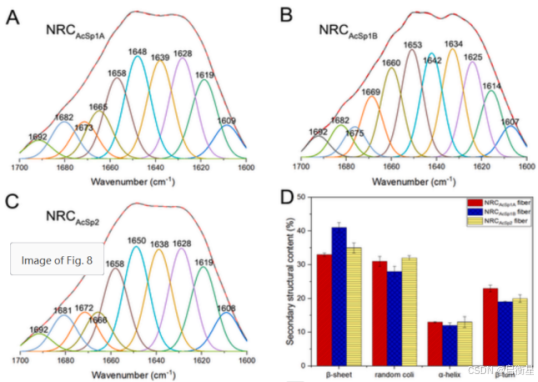
图5. 三种重组纤维的结构性能
葡萄状丝是多种AcSp蛋白的复杂混合物,不同AcSp拥有不同的生物物理性质,所以AcSp不同的组装形式会影响材料的性质。文章详细描述了圆网蜘蛛N. scylloides.葡萄状丝的分子组成。三个AcSp的变体在不同物种间具有相同或相似的一级结构(包括它们的氨基酸组成和重复序列的数量)。但是AcSp1A和AcSp1B在Neoscona spiders中的表达模式却存在显著差异,表明这两个基因可能在不同物种间进化出不同的生物学功能。鉴于这三种AcSp变体在物种内和跨物种间存在广泛的丰度差异,进一步了解它们潜在的分子特性和变异之间的相互作用,将有助于阐明葡萄状丝材料特征的分子机制。

















 8123
8123

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









