






hh
-
移动目标检测(MOD)方法通常设计用于区分图像序列中相对于背景有运动变化的物体,这些方法基于帧间差异、背景建模或其他时间相关的分析来确定哪些像素或区域属于动态目标。静态目标在连续帧之间没有显著的变化,因此它们在直接应用常规MOD技术时可能不会被有效地识别出来。
论文 中提到能够检测到微小的瞬时运动目标(TOD),这是因为即使是微小的运动也会导致像素值发生变化,从而与背景模型产生差异。而对于静止的目标,如果背景模型足够稳定且更新机制合适,理论上也可以通过检测与背景模型之间的不匹配来发现异常,但这种方法往往更容易受到光照变化、阴影、传感器噪声等因素的影响,从而可能导致误判或者漏检。
实际上,在视频监控和计算机视觉领域,针对静态目标的检测更多地依赖于其他类型的算法,例如基于内容的分析、深度学习模型对不同场景下的目标特征的学习等。而专门针对静止目标的检测任务可能会结合时空上下文信息、长时间累积统计信息等多种手段,而非仅仅依赖于帧间的简单差异计算。
Abstract
大多数基于广域运动图像(WAMI)的跟踪器使用基于运动的线索来检测和跟踪运动物体。结果表明,在城市高层建筑环境中,由于视差的影响,误报率非常高。本文提出了一种精确的运动目标检测方法,该方法使用精确的地面正校正方法,结合精确的多视图深度图,将视差效应引起的误报数量减少90%。提出了一种基于中值背景减除得到的运动检测蒙版与图像深度图信息提供的高层结构高度蒙版融合的大比比日航拍城市图像混合移动车辆检测方法。使用建筑物掩模使我们能够将F-measure的目标级检测精度从22.2%提高到79.2%,提高了57%。
Introduction
自动运动目标检测通常是许多视频分析和跟踪应用的关键低层次任务,特别是当应用于大规模航空图像时。运动像素可以进一步处理,用于城市交通监控[1],[2],目标分类[3],注册和跟踪[4]-[6]等不同目的。
背景减法是目前最常用的运动目标检测方法。然而,可靠的基于背景减法的运动目标检测取决于光照补偿、阴影检测、背景动态和背景模型学习率等参数。在航空图像中,背景建模尤其具有挑战性,因为目标小且分辨率低,相机振动会导致对准误差并导致像素值在靠近锐利边缘处发生明显漂移,并且视差效果很强[7]-[11]。
已经提出了各种技术来模拟背景,包括高斯方法的概率混合[12]、卡尔曼滤波[13]、Wallflower[14]和简单中值滤波[15]-[17]。最近提出了上下文感知方法[18],[19],这些方法结合了场景上下文,如高层结构高度掩模或道路网络,以减少误检测并提高系统鲁棒性。
在这项工作中,我们使用了基于时空中位数的背景建模,因为它简单,计算效率高,对噪声具有鲁棒性[1],[15]。中值滤波的性能与更复杂的技术(即GMM)一样好,并且通过混合像素值来避免产生不切实际的像素值[20]。
本文的主要贡献是高精度的运动目标检测,实现对运动车辆的持续跟踪。我们提出的混合移动车辆航空图像检测系统包括四个主要步骤。
第一步,我们应用最先进的配准算法MU BA4S,将图像序列正校正到全局参考系统中,并生成密集的3D点云[21],[22]。
然后,通过将3D点投影到每个相机视图中来计算深度或高度图。
第三步,使用基于中值的背景减法获得运动检测蒙版。
最后,我们将深度图中提取的建筑蒙版信息与运动检测蒙版信息融合,从高楼视差效应中识别地面运动物体,并剔除虚假运动响应。
我们使用像素级和物体级评估方法来评估我们的运动检测方法的性能。图1给出了我们提出的混合移动车辆检测系统的流程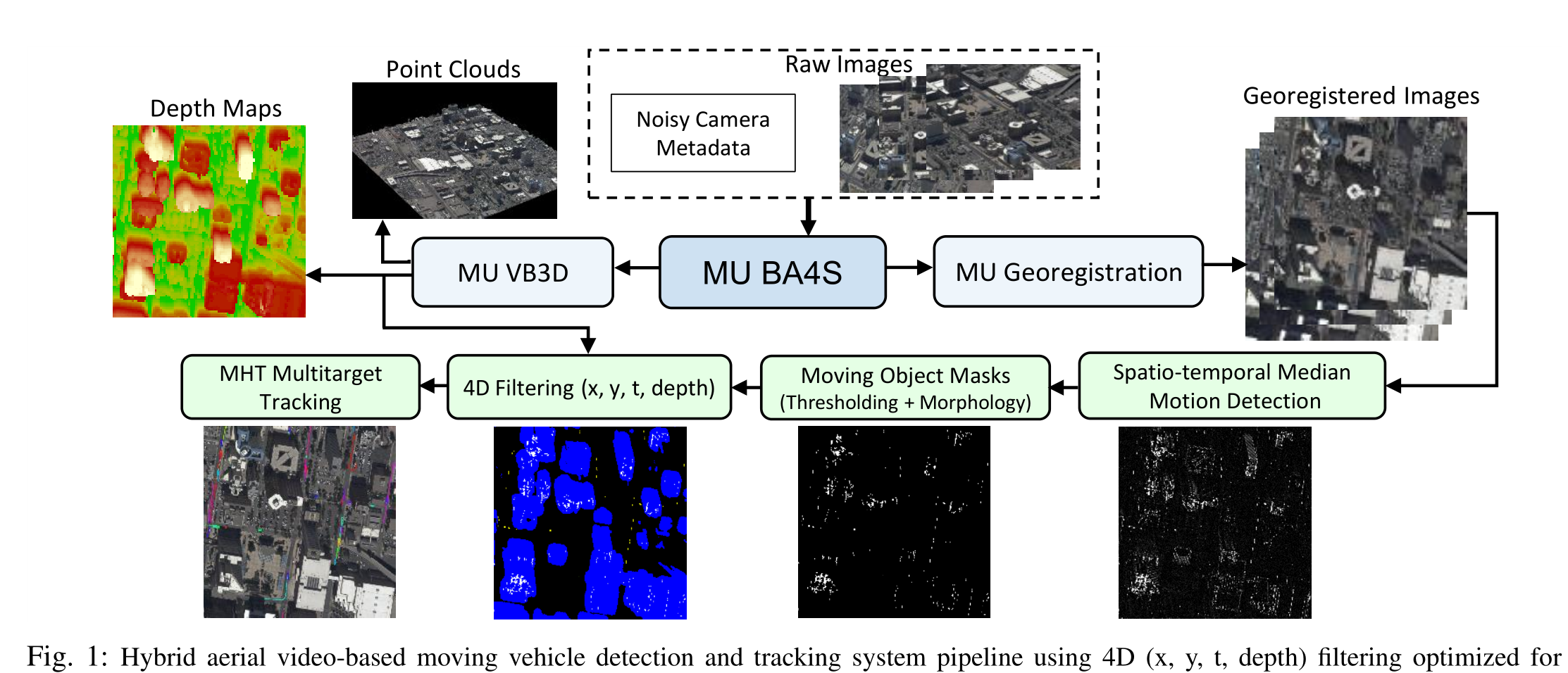
采用4D (x, y, t,depth)滤波的基于混合航拍视频的移动车辆检测与跟踪系统管道,针对视差效果明显、目标较小的城市场景广域运动图像进行优化。精确运动检测所必需的主要模块包括University of Missouri (MU) BA4S[21]、[22]、基于视频的3D重建(VB3D)和正校正。
快速图像配准方法
航拍图像中的视频是在移动的机载平台上拍摄的。检测移动的物体,例如车辆,在一个场景中,由相机观察到的本身有很大的运动和大的抖动,这是极具挑战性的。为了解决这个问题,来自相机平面的图像在全局参照系中进行正校正(配准),以保持运动平台与固定场景之间的相对运动。
Conclusion
我们开发了一个多组件框架,将运动信息与估计的3D结构融合在一起,以可靠地检测城市场景航拍图像中的运动物体。广域航拍图像的运动目标检测非常具有挑战性,因为快速的相机运动阻止了直接使用背景减法,并且场景中高大结构引起的强烈视差会导致过多的错误检测。该框架首先使用我们的快速SfM方法对图像进行正校正。然后,利用鲁棒的基于三维中值的背景减法提取运动斑点。最后,利用快速SfM获得的投影深度图信息和密集的三维点云算法抑制视差引起的误检。该框架已在ABQ航空城市图像上进行了测试。在F-measure方面,我们能够将目标级检测精度从22.2%提高到79.2%,提高57%。这些检测结果对后续航拍图像的持久目标跟踪具有重要的应用前景。















 5663
5663











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









