









运行
最好选择原版的orbslam2源码:
orbslam2源码链接
最关键就一句话,一定要用灰度图跑,直接使用orbslam2的源码就可以
不要使用彩色图
虽然代码逻辑上用彩色图最后也转化为了灰度图,但是,Kitti数据集估计灰度图做了一定处理,所以,不能用彩色图跑,要不然结果差异很大
评测
如果只测试ATE
那么使用EVO工具的evo_ape命令就行,然后使用SE(3)对齐,即加一个“-a”,得到的就是原效果。
如果想得到和原论文一样的指标,建议使用
kitti评估工具
使用的时候同样注意–align 6dof
效果
这是论文中的结果:
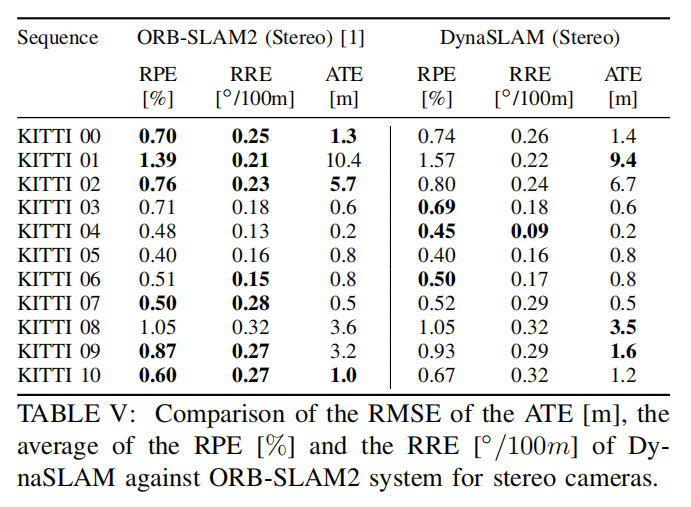
这是我跑出来的结果:
Sequence: 0
Translational error (%): 0.6991026226893858
Rotational error (deg/100m): 0.2523974630223109
ATE (m): 1.2984646007317502
RPE (m): 0.018502443138574583
RPE (deg): 0.05736175303528678
Sequence: 1
Translational error (%): 1.514947701762084
Rotational error (deg/100m): 0.18027862843369094
ATE (m): 11.117947319921196
RPE (m): 0.04968054045036293
RPE (deg): 0.031507571575900985
Sequence: 2
Translational error (%): 0.7525993537725468
Rotational error (deg/100m): 0.2269945253414965
ATE (m): 5.130630778738071
RPE (m): 0.021849862176282576
RPE (deg): 0.04758866147042561
Sequence: 3
Translational error (%): 0.6899142961329343
Rotational error (deg/100m): 0.1673791037265687
ATE (m): 0.5803183212304138
RPE (m): 0.014294846969853659
RPE (deg): 0.03961556060219599
Sequence: 4
Translational error (%): 0.4300742392029325
Rotational error (deg/100m): 0.10515225483002512
ATE (m): 0.16101855759793451
RPE (m): 0.016565951455097126
RPE (deg): 0.03158180202868769
Sequence: 5
Translational error (%): 0.3905637158475052
Rotational error (deg/100m): 0.15604136832831123
ATE (m): 0.7649068203682212
RPE (m): 0.011983678542626379
RPE (deg): 0.039204634606847616
Sequence: 6
Translational error (%): 0.5203046660978126
Rotational error (deg/100m): 0.1439960936885502
ATE (m): 0.7889731979084904
RPE (m): 0.013310449181431165
RPE (deg): 0.0315866848256745
Sequence: 7
Translational error (%): 0.5571768718251755
Rotational error (deg/100m): 0.3319881218290934
ATE (m): 0.5785849329823173
RPE (m): 0.012143307940867536
RPE (deg): 0.03552662552021929
Sequence: 8
Translational error (%): 1.041184032644816
Rotational error (deg/100m): 0.32117829134755604
ATE (m): 3.5162713516630433
RPE (m): 0.023687762088556802
RPE (deg): 0.04179357212128304
Sequence: 9
Translational error (%): 0.8644970446120377
Rotational error (deg/100m): 0.24360228090791816
ATE (m): 3.059875461079776
RPE (m): 0.017498939649824227
RPE (deg): 0.042781380143976186
Sequence: 10
Translational error (%): 0.6257678488722856
Rotational error (deg/100m): 0.29942067015497
ATE (m): 1.1340155005976165
RPE (m): 0.01393528095606781
RPE (deg): 0.04694607736522295
和ORBSLAM2原论文的结果就已经差不多了。















 1153
1153











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











