






基于LQR最优控制算法实现的轨迹跟踪控制,建立了基于车辆的质心侧偏角、横摆角速度,横向误差,航向误差四自由度动力学模型作为控制模型,通过最优化航向误差和横向误差,实时计算最优的K值,计算期望的前轮转角实现轨迹跟踪,仿真效果良好,有对应的资料,包运行和。
YID:75150709284185618
想剁手书屋14


【控制艺术之旅:车辆轨迹跟踪的深度探索】
今天我们要谈的,是控制算法领域内的一项精彩之作——基于LQR最优控制算法实现的轨迹跟踪控制。从工程师的角度看,这不仅是一项技术的进步,更是我们努力提高自动化与智能化的成果。
一、四自由度动力学模型——车辆的新“语言”
在复杂的交通环境中,车辆的运动状态如何被精确地描述和预测?答案就是我们的四自由度动力学模型。它以车辆的质心侧偏角、横摆角速度、横向误差和航向误差为基准,构建了一个详尽而准确的模型。这个模型不仅揭示了车辆运动的基本规律,也为后续的轨迹跟踪控制提供了坚实的理论基础。
二、LQR的舞台:从理论到实践
那么,有了这样的模型后,如何通过它来精确控制车辆进行轨迹跟踪呢?答案是利用LQR最优控制算法。这一算法能够在面对多变的行驶环境和驾驶条件时,实现动态的最优化决策。简单来说,就是通过对模型的各个状态进行量化评估,然后找到最优的控制策略。
三、K值的奥秘:最优化航向与横向误差
在LQR算法的帮助下,我们能够实时计算最优的K值。这个K值就像是一把钥匙,它连接了车辆的当前状态和期望的前轮转角。通过调整K值,我们可以最优化航向误差和横向误差,使车辆能够更精确地沿着预期的轨迹行驶。
四、仿真世界的验证
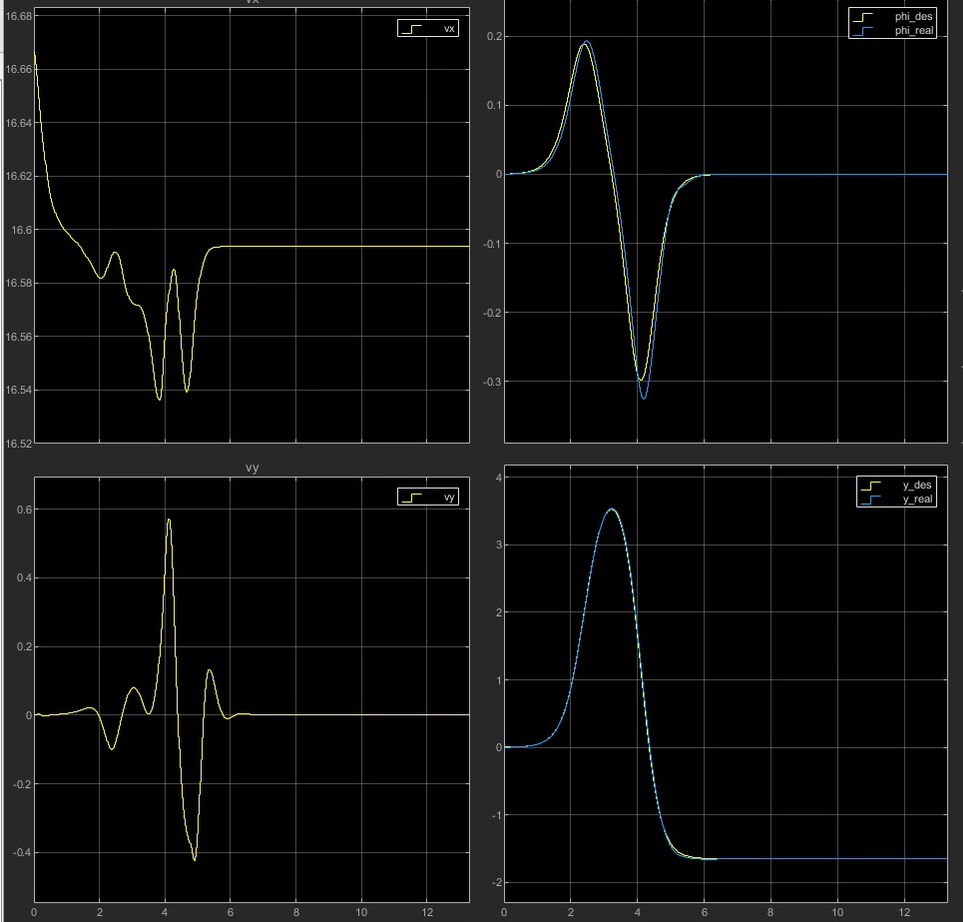
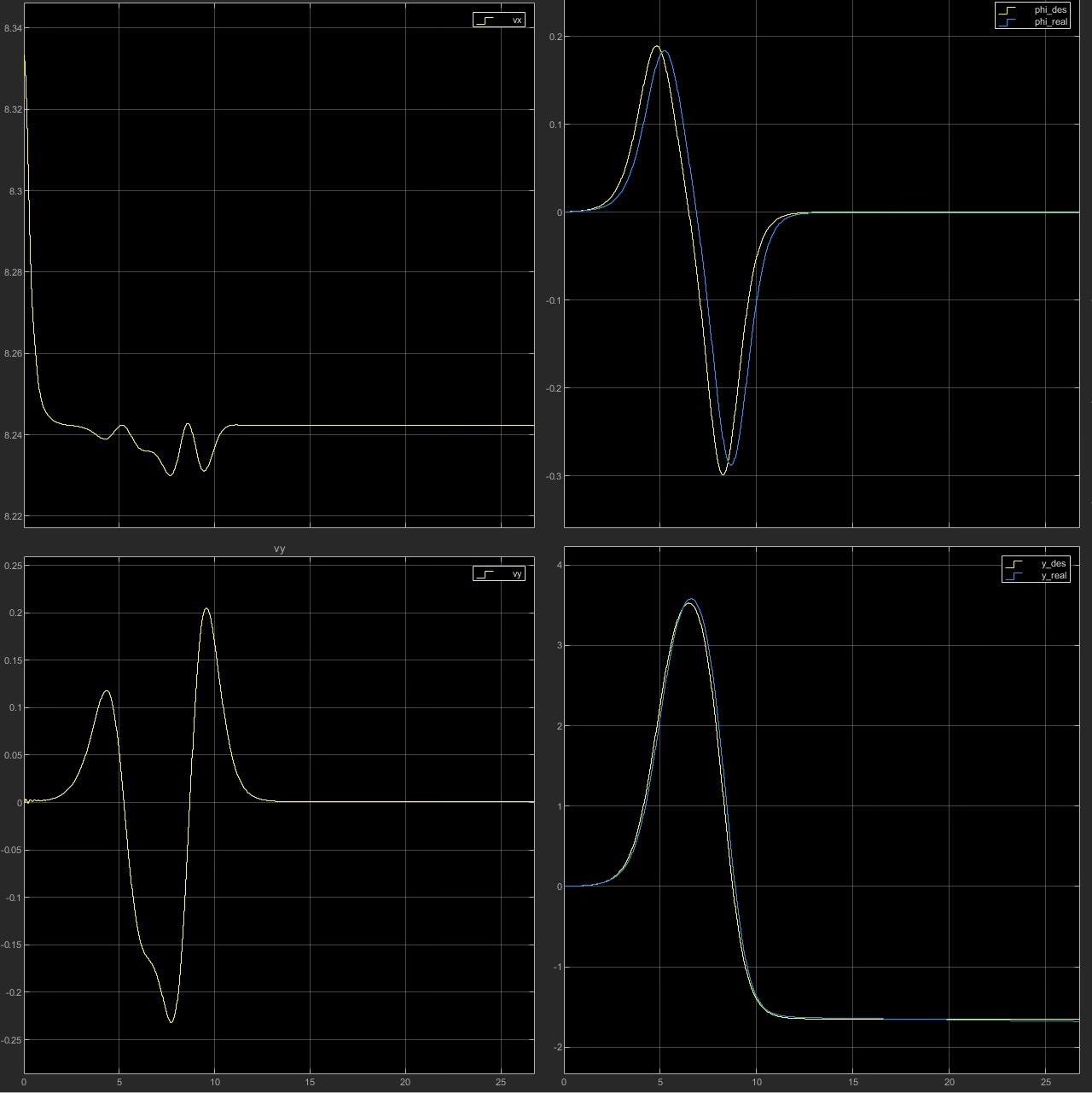
当然,理论再完美也需要实践的检验。通过大量的仿真实验,我们发现基于LQR最优控制算法的轨迹跟踪控制在处理复杂情况时表现出色。无论是在高速公路还是狭窄的小路,它都能实现准确的轨迹跟踪和及时的响应调整。
五、示例代码片段:走向实战的第一步
以下是简化的示例代码片段,它演示了如何根据当前的车辆状态计算期望的前轮转角:
# 假设我们有当前的状态和模型参数
current_state = ... # 包括质心侧偏角、横摆角速度等
desired_trajectory = ... # 期望的轨迹信息
model_parameters = ... # 模型参数
# 使用LQR算法计算最优K值
optimal_K = lqr_algorithm(current_state, desired_trajectory, model_parameters)
# 根据K值计算期望的前轮转角
expected_steering_angle = calculate_steering_angle(optimal_K, current_state)
六、结语:探索无止境
今天我们讨论的基于LQR最优控制算法的轨迹跟踪控制只是众多控制算法中的一种。在未来的道路上,我们还将不断探索更高效、更智能的控制策略。但是,不论如何进化,控制的核心永远都是对精准度和稳定性的追求。正如一个老工程师所说:“让一切如丝般顺滑的运行。”这是我们的终极目标。
这篇技术博客文章的风格是否与你预期的有所不同呢?未来我将继续用不同的视角和口吻探索更多的技术话题,敬请期待。
独家资料,速围观: 基于LQR 优控制算法实现的轨迹跟踪控制,建立了基于车辆的质心侧偏角、横摆角速度,横向误差,航向误差四自由度动
















 898
898

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









