







 本文介绍了如何利用计算机视觉技术,特别是OpenCV库,进行倾斜图像与正射影像的匹配。通过正向投影和反向投影的概念,详细阐述了从灰度图像处理、SIFT关键点检测、描述符匹配到RANSAC算法计算单应性矩阵的过程,最终实现相机位置的确定和两图像的自动匹配。
本文介绍了如何利用计算机视觉技术,特别是OpenCV库,进行倾斜图像与正射影像的匹配。通过正向投影和反向投影的概念,详细阐述了从灰度图像处理、SIFT关键点检测、描述符匹配到RANSAC算法计算单应性矩阵的过程,最终实现相机位置的确定和两图像的自动匹配。
在图像投影和映射领域,有两种类型的投影:正向投影和反向投影。正向投影涉及使用内部方向(即校准相机参数)将 3D 点(例如地面上的物体)投影到 2D 图像平面上。另一方面,向后投影是指根据 2D 图像确定地面物体的 3D 坐标的过程。
为了匹配倾斜图像和正射影像并确定相机位置,需要进行后向计算。在这种情况下,我们可以利用 OpenCV 库来帮助我们将倾斜图像粗略地映射回地面。
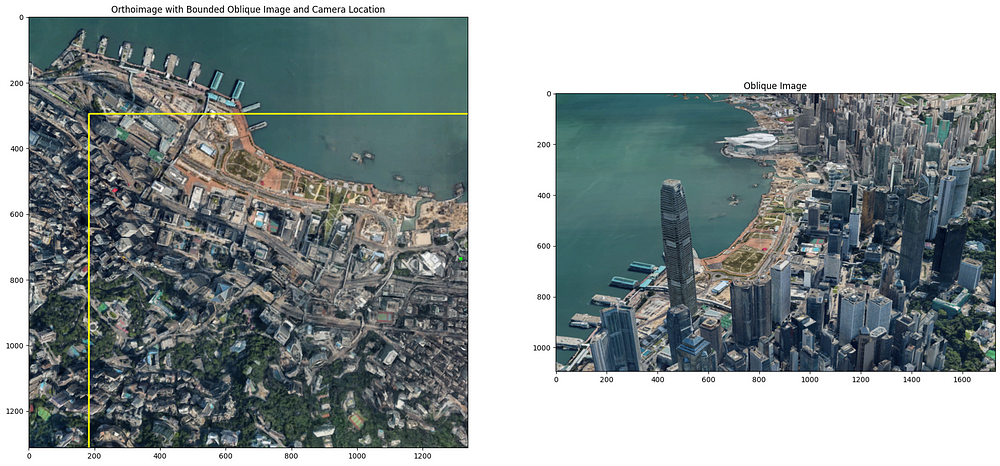
相机位置与正射影像自动匹配的目标结果 1
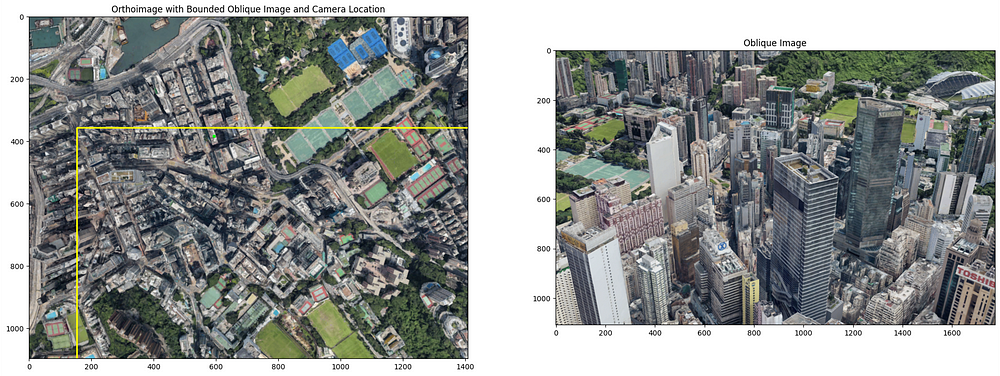
相机位置与正射影像自动匹配的目标结果 2
自动匹配倾斜图像与正射影像的工作流程
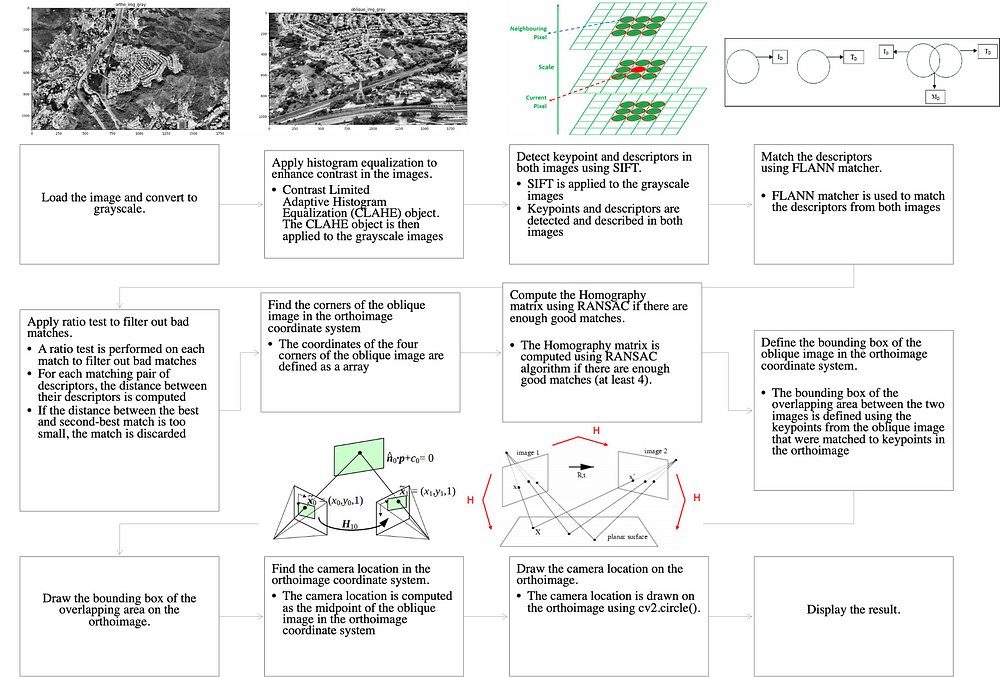
将倾斜图像与正射影像进行匹配的一般工作流程
加载正射图像和倾斜图像并将其转换为灰度图像。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 535
535

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











