







1-环境配置和创建工作空间参考上一篇文章
在Ubuntu 20.04中使用ROS noetic版本实现HelloROS
2-创建包
# 进入工作空间根目录下的src目录
cd src
# 创建包的同时添加依赖
catkin_create_pkg hello_listen std_msgs roscpp3-编写代码
使用clion打开src/hello_listen目录,在hello_listen/src目录中新建hello_listen_node.cpp源文件,并实现如下编码:
#include "ros/ros.h"
#include "std_msgs/String.h"
//接收到消息的回调函数
void helloCallback(const std_msgs::String::ConstPtr& msg)
{
//控制台打印收到的消息
ROS_INFO("i heard %s", msg->data.c_str());
}
int main(int argc, char* argv[])
{
//初始化ros节点
ros::init(argc, argv, "hello_listen");
ros::NodeHandle h;
//创建订阅对象时设置topuic,接受订阅前的10个消息,接收到消息的回调
ros::Subscriber sub = h.subscribe("/hello_topic", 10, helloCallback);
//保持程序运行不退出
ros::spin();
return 0;
}
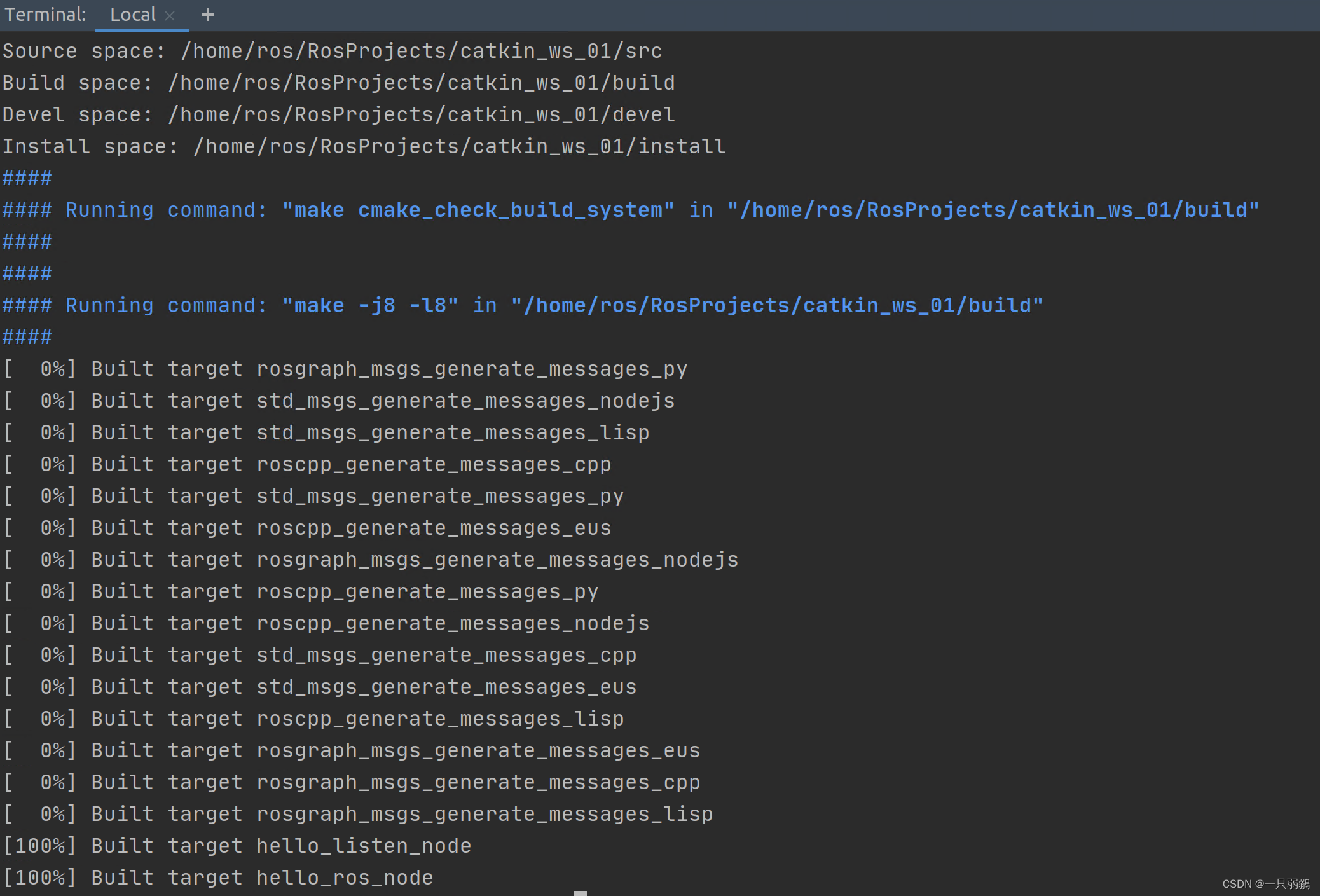
4-修改CMakeLists.txt文件和编译
操作同上篇文章,编译成功提示如下图所示,显示之前的包也编译成功
5-运行
# 启动ros master节点
roscore
# 运行上篇文章中的发布程序
rosrun hello_ros hello_ros_node
# 运行本次编写的订阅程序
rosrun hello_listen hello_listen_node
可以看到上图中已经接收并打印出订阅的消息内容,表明编写的代码可实现简单的订阅消息并打印功能。本专栏将继续更新ROS学习的文章,希望继续和大家一起学习。
千淘万漉虽辛苦,吹尽狂沙始到金。















 1561
1561











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











