







 本文探讨了多种机器人路径规划算法,包括通过惩罚函数优化路径的模型、利用CHOMP和STOMP算法解决高维运动规划问题的方法,以及采用TEB算法实现动态避障和重规划的技术。这些算法有效地解决了路径平滑、局部最小值和动态障碍物等问题。
本文探讨了多种机器人路径规划算法,包括通过惩罚函数优化路径的模型、利用CHOMP和STOMP算法解决高维运动规划问题的方法,以及采用TEB算法实现动态避障和重规划的技术。这些算法有效地解决了路径平滑、局部最小值和动态障碍物等问题。
关注同名微信公众号“混沌无形”,阅读更多有趣好文!
原文链接:机器人曲线插值拟合算法研究现状简述(包含原文PDF百度云下载链接)


第三类算法是主要是将多目标多变量多约束耦合的规划模型转化为有权重的惩罚函数,并优化求解,通常用于初始路径的平滑。
Ren等人针对势场法存在振荡等问题,将改进牛顿法优化方法应用于连续势场导航模型,并考虑了机器人非全向约束和移动障碍物影响,极大提升了系统性能,但存在优化计算成本较高的问题[13]。
Ratliff等人针对高维运动规划问题提出CHOMP(Covariant Hamilton Optimization Motion Planning)算法(图 2.6),先创建起始位置到终止位置的初始路径,针对成本函数使用梯度下降法对轨迹进行优化,获得平滑、无碰撞的轨迹,但存在容易陷入局部最小值的问题,因此引入了使用Hamilton Monte Carlo算法施加扰动,以重新启动优化过程,然而,引入了随机性,从而降低了优化结果的确定性。
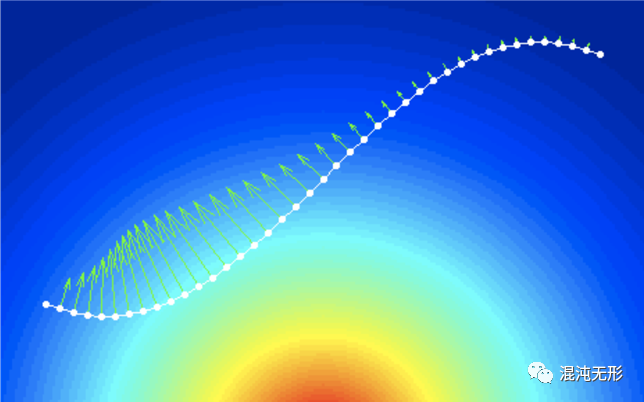
图 2.6 CHOMP[14]
与之相近,Kalakrishnan等人提出的STOMP (Stochastc Trajectory Optimization Motion Planning)算法不需要目标函数梯度信息,因此可提高机器人运动规划性能,通过生成带有噪声的轨迹探索初始轨迹周围的空间,以产生较低成本的轨迹。其随机性也克服了基于梯度方法存在的局部最小值问题[14]。
Dolgov等人使用Hybrid A*生成的初始路径,并以路径曲率最小化为目标,使用共轭梯度法优化得到平滑路径,并将存在碰撞情况的对应原始路径点作为锚点重新优化,以保证路径安全可靠[10]。
Ziegler等人提出一种局部连续的轨迹规划方法,通过结合道路边缘及障碍物将工作空间转化为凸空间,并引入连续可微的伪距离构建伪梯度场,综合模型硬约束及舒适性等要求,转化为带约束的非线性规划问题,并使用序列二次规划算法求解[15]。
Quinlan、Rösmann、Magyar等人将“橡皮筋受内、外力作用产生形变”的原理应用于路径平滑处理,EB(Elastic Bands)[16]算法使用气泡带算法生成不连续的初始路径,再使用“橡皮筋”形变模型优化路径形状,生成无碰撞的平滑路径。TEB(Timed Elastic Band)[17]将静态、动态约束(速度、加速度等)和机器人状态使用稀疏图描述(强扩展特性),并转化为加权的单目标优化问题,并使用大规模最小二乘法求解,生成符合约束最低成本的轨迹(见图 2.7),具有极强的动态避障和重规划能力,并应用于多种类型的轮式机器人。DT-TEB(TEB in distinctive topologies)[18]将RRT算法、Voronoi图分别与TEB相结合,实时生成局部拓扑空间中全局最优轨迹,并延长了生成轨迹的长度,提高避障性能。CES(Convex Elastic Smoothing)[19]算法针对类车机器人运动规划模型,将气泡带初始路径形状“拉伸”优化及给定路径下速度优化问题构造为两个凸优化问题,并迭代优化路径曲线-速度曲线,实时生成平滑轨迹。
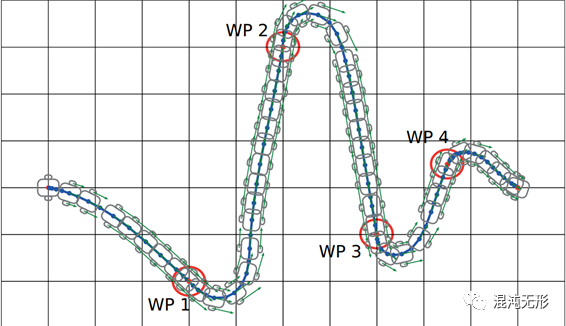
图 2.7 TEB算法[17]
精彩的理论论证过程见原文链接(含全文下载链接)
由于网页排版效果一般,所以笔者按照期刊论文版式为小伙伴们整理了原文PDF,方便收藏和回味。
原文链接:(包含原文PDF百度云下载链接)
CSDN下载链接:机器人曲线插值拟合算法研究现状简述如果喜欢的话,可以关注我,阅读更多有趣好文!
微信公众号:混沌无形
知乎号:混沌无形
B站:混沌无形R



















 4078
4078

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











