







索引
一、原理
根据空间内的任意两个坐标点和旋转角度,计算旋转矩阵进行旋转。原理参考博客
绕任意轴旋转的情况比较复杂,主要分为两种情况,一种是平行于坐标轴的,一种是不平行于坐标轴的,对于平行于坐标轴的,我们首先将旋转轴平移至与坐标轴重合,然后进行旋转,最后再平移回去。
将旋转轴平移至与坐标轴重合,对应平移操作
旋转,对应操作
步骤1的逆过程,对应操作 
整个过程就是

对于不平行于坐标轴的,可按如下方法处理。(该方法实际上涵盖了上面的情况)
- 将旋转轴平移至原点
- 将旋转轴旋转至YOZ平面
- 将旋转轴旋转至于Z轴重合
- 绕Z轴旋转θ度
- 执行步骤3的逆过程
- 执行步骤2的逆过程
- 执行步骤1的逆过程
假设用v1(a1, b2, c2)和v2(a2, b2, c2)来表示旋转轴,θ表示旋转角度。为了方便推导,暂时使用右手系并使用列向量,待得出矩阵后转置一下即可,上面步骤对应的流程图如下。
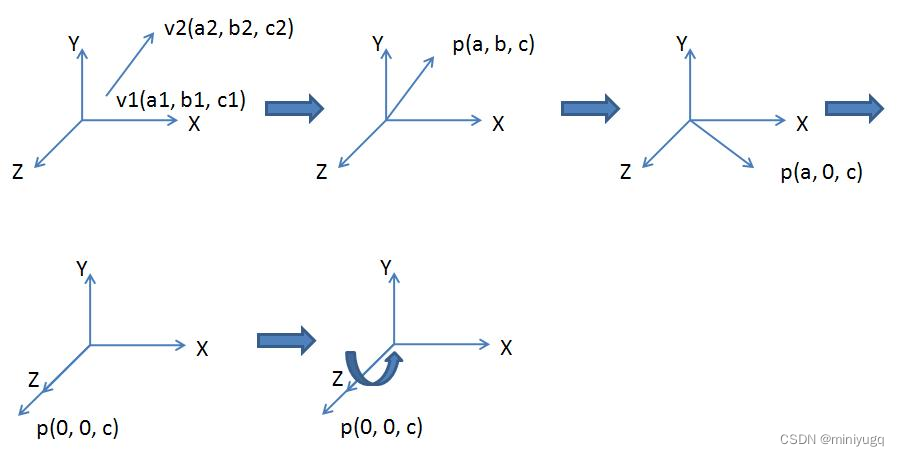
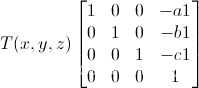
步骤1是一个平移操作,将v1v2平移至原点,对应的矩阵为
步骤2是一个旋转操作,将p(p = v2 -v1)旋转至XOZ平面,步骤3也是一个旋转操作,将p旋转至与Z轴重合,这两个操作对应的图如下。
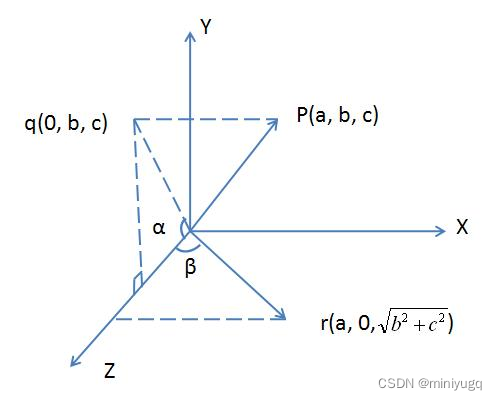
做点p在平面YOZ上的投影点q。再过q做Z轴垂线,则r是p绕X轴旋转所得,且旋转角度为α,且
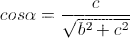 ,
,
于是旋转矩阵为

现在将r绕Y轴旋转至与Z轴重合,旋转的角度为-beta(方向为顺时针),且
 ,
, 
于是得到旋转矩阵为

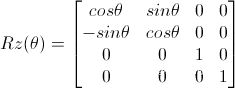
最后是绕Z轴旋转,对应的矩阵如下
如果旋转轴是过原点的,那么第一步和最后一步的平移操作可以省略,也就是把中间五个矩阵连乘起来,再转置一下,得到下面的绕任意轴旋转的矩阵

即

二、源码
"""
根据旋转轴两个端点、旋转角度,得到旋转矩阵
v1 旋转轴端点1 (-130.009995,-158.779999,31.349001)
v2 旋转轴端点2 (-129.216995,-157.925003,31.320999)
theta 旋转弧度 60度
"""
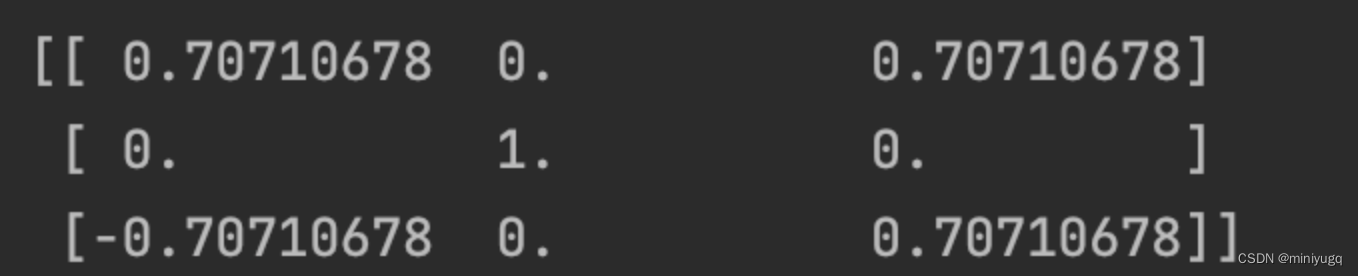
def rotateMatrix(v1, v2, theta):
# 向量相减
p = np.asarray(v2) - np.asarray(v1)
# 求单位向量
rand_axis = p / np.linalg.norm(p)
# 旋转角度
r = math.radians(theta)
# 返回旋转矩阵
rot_matrix = linalg.expm(np.cross(np.eye(3), rand_axis * r))
return rot_matrix
三、结果















 327
327











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











