






最近在学习 navigation_tutorial中,
代码地址:https://github.com/ros-planning/navigation_tutorials
在运行point_cloud_publisher、laser_scan_publisher历程时,
打开rviz,添加
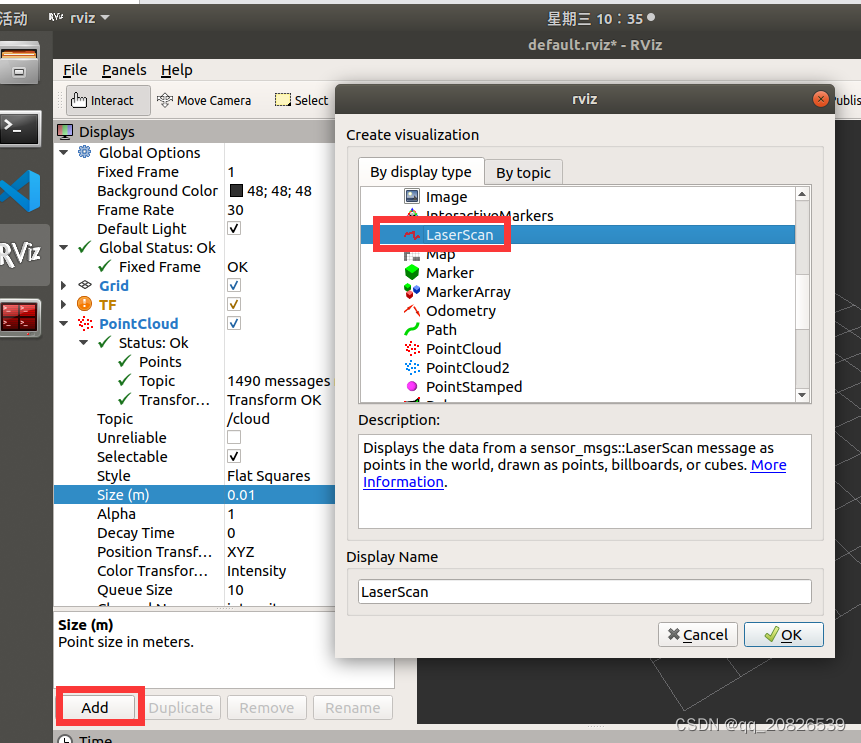
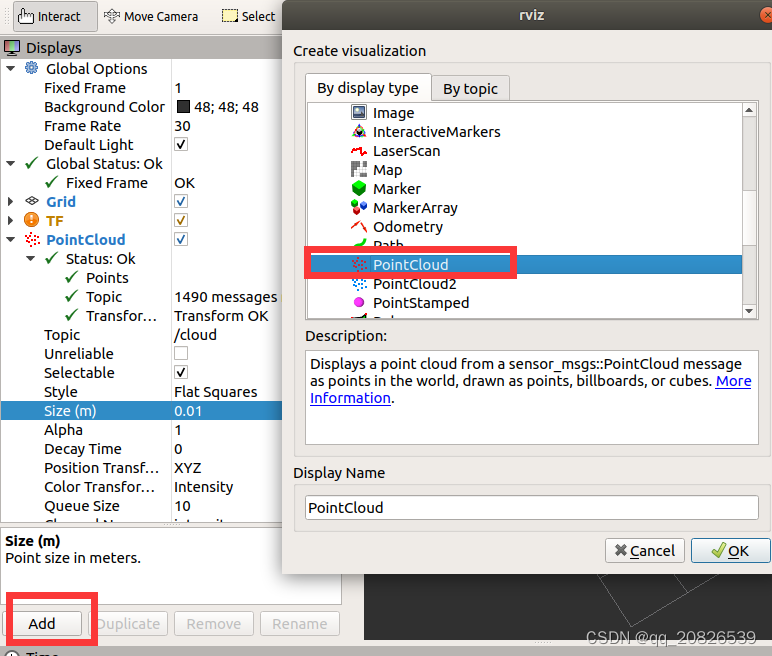
topic调到相应的topic例如/cloud表示pointcloud点云的topic:
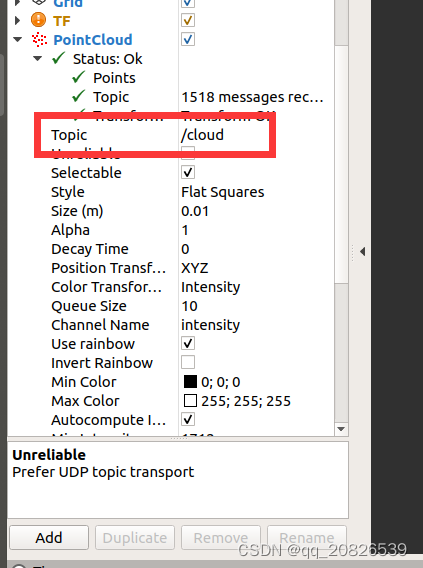
(上面图片引用的是设置好的可以接受数据的pointcloud截图)
本以为会直接显示点云和雷达数据,结果都出现了Frame [***] does not exist的问题
点开LaserScan-status中 topic并没有出现 ** messages received 收到数据的字眼,
然后网上查阅相关资料,说可能是没有设置tf等原因,然后又调用navigation_tutorial中的robot_setup_tf仍旧不行,也可能是这个历程这里没有设计相应的tf变换吧。
继续查网络资料,查到了一个写的,下面这个方法实验之后发现可以解决这个问题:
使用 映射关系:
rosrun tf static_transform_publisher 0 0 0 0 0 0 name1 name2 10
其中,name1是映射后的名字,name2是映射前的名字,我在laser发布的.cpp文件中查看,该frame_id=laser_frame,则 name2 = laser_frame
于是我用以下去映射laser的数据
rosrun tf static_transform_publisher 0 0 0 0 0 0 1 laser_frame 10
然后在Global Options-Fixed Frame中多出了1 和laser_frame这两个
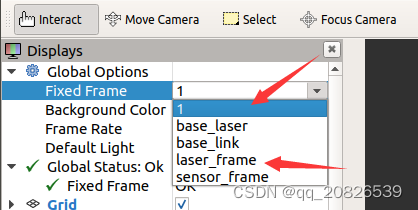
将其设置为1 或者 laser_frame (均可)。
然后设置LaserScan-Topic 为/scan ,
发现数据成功接受并显示在rviz上了。
ps:我其实以为运行了发布topic的可执行文件之后默认的sensor_frame应该直接出现在Global Options-Fixed Frame中的,不过不知道为啥没有出现,可能是还要设置什么东西吧,果然还是要学习程度不够呀














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









