







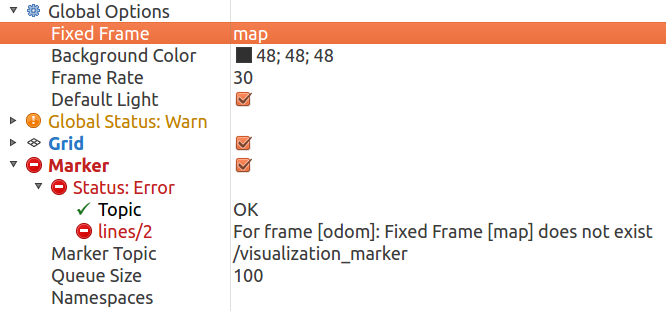
报错: For frame [xxx]: Fixed Frame [map] does not exist , 如下图所示
且 Fixed Frame下拉只有map
解决: xxx是什么,直接在Fixed Frame那里打上什么就行.
报错: For frame [xxx]: Fixed Frame [map] does not exist , 如下图所示
且 Fixed Frame下拉只有map
解决: xxx是什么,直接在Fixed Frame那里打上什么就行.











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


















 5万+
5万+





