






官方文档链接
http://www.open3d.org/docs/release/
示例代码
先对点云进行下采样,然后用estimate_normals函数进行点云的法线估计,该函数查找相邻点并使用协方差分析主轴。
该函数将KDTreeSearchParamHybrid类的实例作为参数。 两个关键参数radius = 0.1和max_nn = 30指定搜索半径和最大最近邻近点个数。 它的搜索半径为10厘米,最多可考虑30个邻居,以节省计算时间。
import open3d as o3d
import numpy as np
print("Load a ply point cloud, print it, and render it")
# 从文件中读取点云
pcd = o3d.io.read_point_cloud('./fragment.ply')
print("Recompute the normal of the downsampled point cloud")
downpcd = pcd.voxel_down_sample(voxel_size=0.05)
downpcd.estimate_normals(
search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30))
o3d.visualization.draw_geometries([downpcd],
zoom=0.3412,
front=[0.4257, -0.2125, -0.8795],
lookat=[2.6172, 2.0475, 1.532],
up=[-0.0694, -0.9768, 0.2024],
point_show_normal=True)
print("Print a normal vector of the 0th point")
print(downpcd.normals[0])
print("Print the normal vectors of the first 10 points")
print(np.asarray(downpcd.normals)[:10, :])
将需要读取的文件放在与该py文件的同级目录下,文件可从文章末尾的某盘中获取。
运行结果:
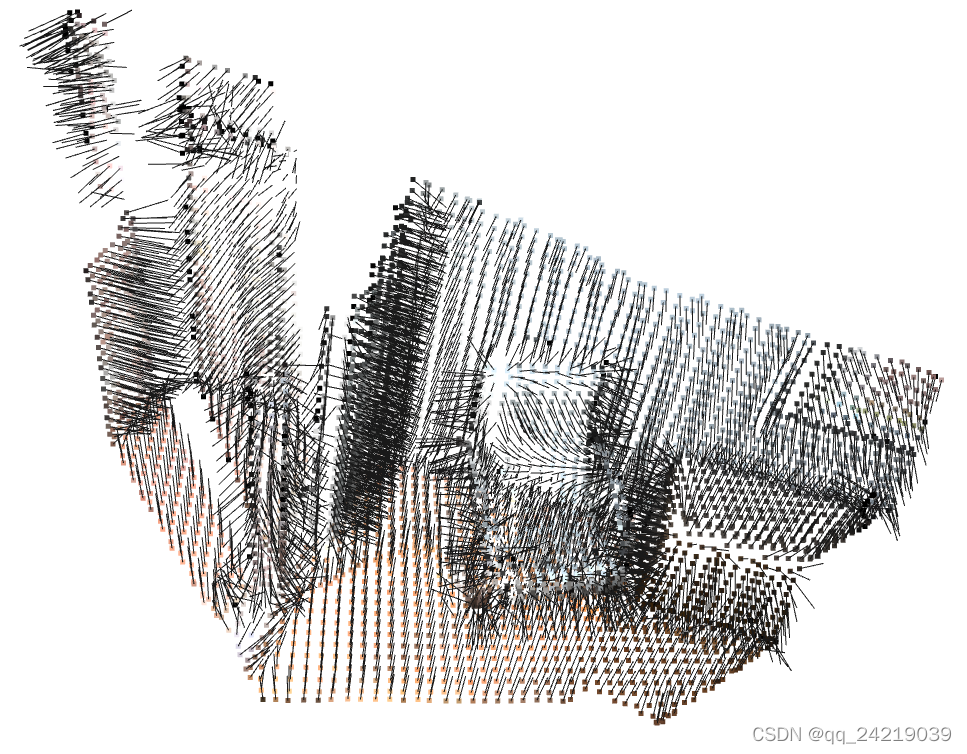
按键 “+” 和 “-” 可以改变法线的长短,按键 “n” 可以切换原始状态。
文件链接
链接:https://pan.baidu.com/s/1V3anL9caeDe6bWgHsrEpTg
提取码:5u7b















 4981
4981











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









