







通信协议原理及应用
通信分类
根据数据传输方式可分为串行通信和并行通信,根据接收端和发送端时钟频率的异同可以分为同步通信和异步通信,根据通信双方的分工和信号传输方向可分为单工通信、半双工通信和全双工通信。
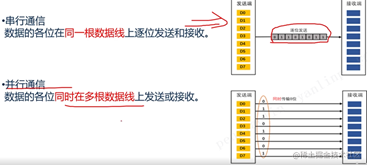
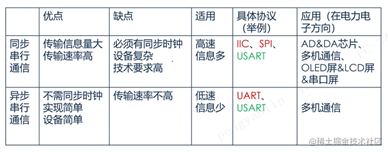
串行通信、并行通信
串行通信:数据的各位在同一根数据线上逐位发送和接受;
并行通信:数据的各位同时在多根数据线上发送或接收

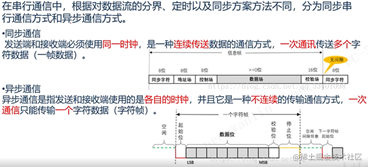
同步通信、异步通信
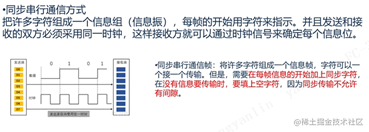
同步通信:发送和接收端使用同一时钟,是一种连续传输数据的通信方式,一次通信传输多个字符数据;同步通信要在每帧信息的开始加上同步字符,在没有信息要传输时,要填上空字符;
异步通信:发送和接收端使用各自时钟,是一种不连续传输数据的通信方式,一次通信传输一个字符数据;异步通信由起始位、数据位、校验位以及停止位构成字符帧,接收端始终处于接收状态。

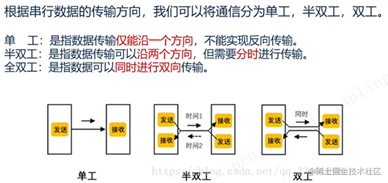
单工、半双工、双工通信
根据串行数据的传输方向,可以将通信分为单工、半双工、双工通信。
另外,要注意串行通信传输速率中比特率和波特率的区别:
比特率:每秒钟传送的二进制位数,单位bps;
波特率:每秒钟调制信号变化的次数,单位Baud。
串行通信常用波特率表示数据传输率,如9600 115200等
波特率与比特率的关系为:比特率 = 波特率 × 单个调制状态对应的二进制位数
单个调制状态对应1个二进制位时,或对于数字信号1或0直接用两种不同电压表示的基带传输,此时,比特率==波特率。
而在串行通信中,双方识别位的时间间隔要相同,所以通信双方的波特率必须一致。
UART原理
串口通信与UART通信的区别
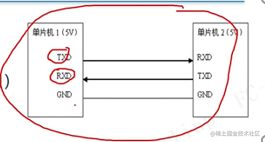
UART:通用异步接收/发送装置,两线(Rx、Tx)实现的异步、全双工通信方式;
串口:含义比UART广,包括了UART
嵌入式中说的串口,一般是UART口
由于串口通信没有时钟信号线,所以接收和发送方需要规定好相同的波特率,以此保证传输数据的正确性。
工作原理
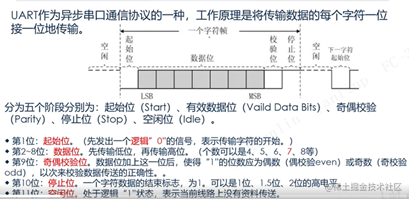
发送端:空闲状态下,线路处于高电平;当接收到发送指令后,拉低线路的一个数据位的时间T,接着数据按低位到高位依次发送,数据发送完毕后,接着发送奇偶校验位和停止位,一帧数据发送完成。
接收端:空闲状态,线路处于高电平;当检测到线路的下降沿(高电平变为低电平)时说明线路有数据传输,按照约定的波特率从低位到高位接收数据,数据接收完毕后,接着接收并比较奇偶校验位是否正确&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









