







粒子滤波算法递归地计算状态估计,包括两个步骤:
1、预测:算法利用给出的系统模型,由前一时刻的状态估计现在时刻的状态;
2、校正:算法利用当前感知方法去校正状态估计。
想要正确的使用粒子滤波,你必须确定如下参数:粒子数量,初始目标区域,状态估计方法。此外,如果你有特定的运动和感知模型,则分别在状态转换函数和测量似然函数中指定这些参数。想要更多信息,请参考粒子滤波参数(粒子滤波参数)。
下面是使用粒子滤波的基本流程图。本文详细介绍了预测估计流程,并且显示了如何在循环中运行粒子滤波以及连续状态估计的示例。
一、估计流程图
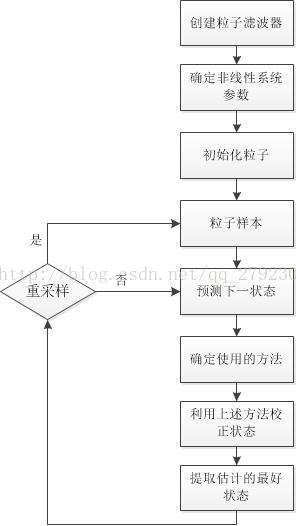
二、具体过程
创建粒子滤波器:
调用 robotics.ParticleFilter(点击打开链接)
设置非线性系统参数:
将这些粒子滤波器参数的参数设置为你自己具体的系统或者应用的参数,
StateTransitionFcn
MeasurementLikelihoodFcn
ResamplelingPolicy
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











