







保凸运算
交集
若 S 1 , S 2 S_1,S_2 S1,S2 为凸集,则 S 1 ⋂ S 2 S_1 \bigcap S_2 S1⋂S2 为凸集。
若 S a S_a Sa 为凸集, ∀ a ∈ A \forall a \in A ∀a∈A, 则 ⋂ a ∈ A S a \bigcap_{a \in A} S_a ⋂a∈ASa 为凸集。
仿射函数
f : R n ↦ R m f: R^n \mapsto R^m f:Rn↦Rm 是仿射的,当 f ( x ) = A x + b A ∈ R n b ∈ R m f(x)=Ax+b \quad A \in R^n \quad b \in R^m f(x)=Ax+bA∈Rnb∈Rm
若 S ⊂ R n S \subset R^n S⊂Rn 为凸, f : R n ↦ R m f: R^n \mapsto R^m f:Rn↦Rm 是仿射的,则 f ( S ) = { f ( x ) ∣ x ∈ S } f(S) = \lbrace f(x) | x \in S \rbrace f(S)={f(x)∣x∈S} 为凸。
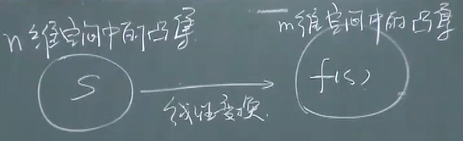
例如:把足球线性变换称橄榄球,仍是凸集。
逆仿射变换
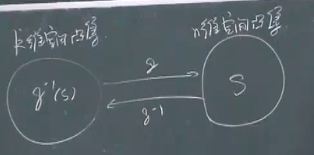
g : R k ↦ R n g:R^k \mapsto R^n g:Rk↦Rn 为仿射。
g − 1 ( S ) = { x ∣ f ( x ) ∈ S } g^{-1}(S) = \lbrace x|f(x) \in S \rbrace g−1(S)={x∣f(x)∈S}
逆仿射变换也能保证集合的凸性。
缩放于移位都保持凸性
缩放:
α
S
=
{
α
x
∣
x
∈
S
}
\alpha S = \lbrace \alpha x | x \in S \rbrace
αS={αx∣x∈S}
把足球缩成乒乓球
移位: S + a = { x + a ∣ x ∈ S } S + a = \lbrace x + a | x \in S \rbrace S+a={x+a∣x∈S}
缩放于移位都是一种仿射映射
两个凸集的和是凸的
S 1 + S 2 = { x + y ∣ x ∈ S 1 , y ∈ S 2 } S_1 + S_2 = \lbrace x+y | x \in S_1, y \in S_2 \rbrace S1+S2={x+y∣x∈S1,y∈S2}
证:
定义集合:
S
1
∗
S
2
=
{
(
x
,
y
)
∣
x
∈
S
1
,
y
∈
S
2
}
S_1 * S_2 = \lbrace (x,y) | x \in S_1, y \in S_2 \rbrace
S1∗S2={(x,y)∣x∈S1,y∈S2}
如果
S
1
,
S
2
S_1,S_2
S1,S2 都是凸集,
S
1
∗
S
2
S_1 * S_2
S1∗S2 可以写成
S
1
∗
S
2
=
z
S
1
+
(
1
−
z
)
S
2
S_1 * S_2 = zS_1 + (1-z)S_2
S1∗S2=zS1+(1−z)S2, 所以
S
1
∗
S
2
S_1 * S_2
S1∗S2 是凸集。
定义仿射变换:
f
(
x
,
y
)
=
x
+
y
f(x,y) = x+ y
f(x,y)=x+y
所以:
S
1
+
S
2
S_1 + S_2
S1+S2 为凸集。
线性矩阵不等式 LMI
A ( x ) = x 1 A 1 + . . . + x n A n ≼ B B , A i , x i ∈ S m A(x)=x_1A_1+...+x_nA_n \preccurlyeq B \quad B,A_i,x_i \in S^m A(x)=x1A1+...+xnAn≼BB,Ai,xi∈Sm
线性矩阵不等式的解集也是凸集: { x ∣ A ( x ) ≼ B } \lbrace x | A(x)\preccurlyeq B \rbrace {x∣A(x)≼B} 为凸集
证:
定义仿射变换
f
(
x
)
=
B
−
A
(
x
)
f(x) = B - A(x)
f(x)=B−A(x),
由高维矩阵空间到低维矩阵空间。等号左边每个点都是由很多矩阵构成,等号右边每个点都是由一个矩阵构成的
已知:
S
+
n
S_+^n
S+n 为凸集
从而: f − 1 ( S + n ) = { x ∣ B − A ( x ) ≽ 0 } f^{-1}(S_+^n) = \lbrace x | B-A(x) \succcurlyeq 0 \rbrace f−1(S+n)={x∣B−A(x)≽0}
所以: { x ∣ A ( x ) ≼ B } \lbrace x | A(x)\preccurlyeq B \rbrace {x∣A(x)≼B} 为凸集
椭球是球的仿射映射
椭球: ε = { ( x − x c ) T P − 1 ( x − x c ) ≤ 1 } P ⊂ S + + n \varepsilon = \lbrace (x-x_c)^T P^{-1} (x-x_c) \leq 1 \rbrace \quad P \subset S_{++}^n ε={(x−xc)TP−1(x−xc)≤1}P⊂S++n
单位球: { u ∣ ∣ ∣ u ∣ ∣ 2 ≤ 1 } \lbrace u \;| \; ||u||_2 \leq 1 \rbrace {u∣∣∣u∣∣2≤1}
定义仿射变换: f ( u ) = P 1 2 u + x c f(u) = P^{\frac{1}{2}}u + x_c f(u)=P21u+xc
{ f ( u ) ∣ ∣ ∣ u ∣ ∣ 2 ≤ 1 } = { P 1 2 u + x c ∣ ∣ ∣ u ∣ ∣ 2 ≤ 1 } \lbrace f(u) \;| \; ||u||_2 \leq 1 \rbrace = \lbrace P^{\frac{1}{2}}u + x_c \;| \; ||u||_2 \leq 1 \rbrace {f(u)∣∣∣u∣∣2≤1}={P21u+xc∣∣∣u∣∣2≤1}
定义 x = P 1 2 u + x c u = P − 1 2 ( x − x c ) x=P^{\frac{1}{2}}u + x_c \quad u=P^{-\frac{1}{2}}(x-x_c) x=P21u+xcu=P−21(x−xc)
{ f ( u ) ∣ ∣ ∣ u ∣ ∣ 2 ≤ 1 } = { P 1 2 u + x c ∣ ∣ ∣ u ∣ ∣ 2 ≤ 1 } = { x ∣ ∣ ∣ P − 1 2 ( x − x c ) ∣ ∣ 2 ≤ 1 } = { x ∣ ( x − x c ) T P − 1 ( x − x c ) } \begin{aligned} \lbrace f(u) \;| \; ||u||_2 \leq 1 \rbrace &= \lbrace P^{\frac{1}{2}}u + x_c \;| \; ||u||_2 \leq 1 \rbrace \\ &= \lbrace x \;| \; ||P^{-\frac{1}{2}}(x-x_c)||_2 \leq 1 \rbrace \\ &= \lbrace x \;| \; (x-x_c)^T P^{-1} (x-x_c) \rbrace \end{aligned} {f(u)∣∣∣u∣∣2≤1}={P21u+xc∣∣∣u∣∣2≤1}={x∣∣∣P−21(x−xc)∣∣2≤1}={x∣(x−xc)TP−1(x−xc)}














 5338
5338











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









