







1 Lidar是什么?
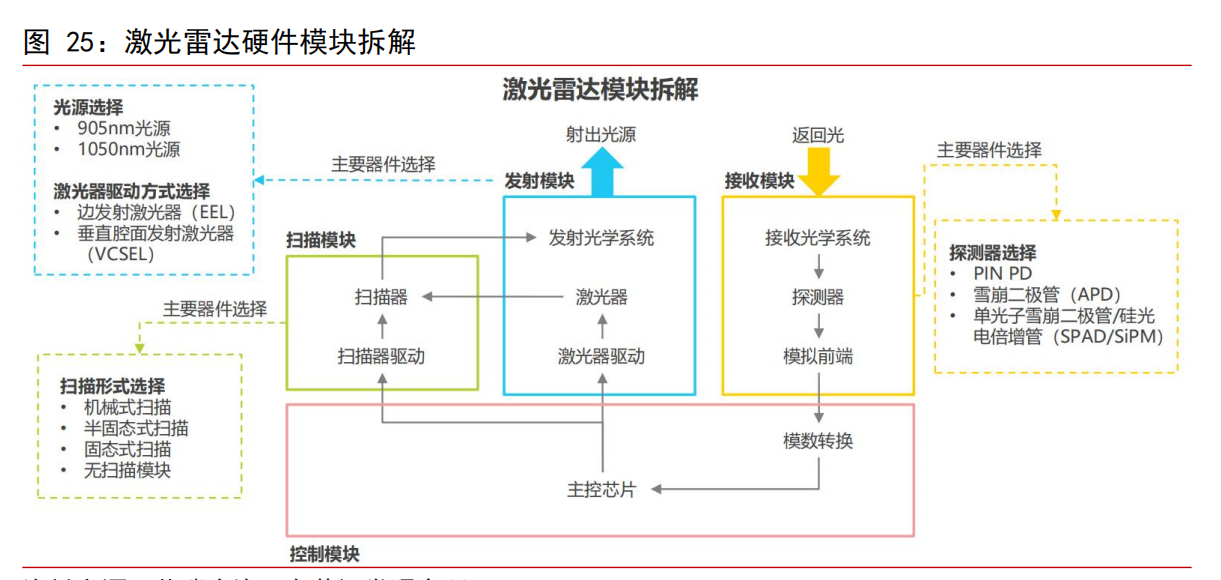
激光雷达(英文:Laser Radar),是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。它由激光发射机、光学接收机、转台和信息处理系统等组成,激光器将电脉冲变成光脉冲发射出去,光接收机再把从目标反射回来的光脉冲还原成电脉冲,送到显示器。
激光雷达由于使用的是激光束,工作频率较微波高了许多,因此带来了很多优点,主要有:精度高,分辨率高,隐蔽性好、抗有源干扰能力强,低空探测性能好。
缺点:工作时受天气和大气影响大。激光一般在晴朗的天气里衰减较小,传播距离较远。而在大雨、浓烟、浓雾等坏天气里,衰减急剧加大,传播距离大受影响。另外对静止物体如隔离带的探测较弱且技术落地成本高昂。
2. 有哪些分类?
激光雷达从结构上划分为3种:机械式激光雷达,纯固态激光雷达、混合固态/半固态激光雷达。
机械式激光雷达:通过ToF技术(Time of flight的简写,直译为飞行时间的意思)来确定目标位置与距离的。主要玩家:禾赛、Velodyne、速腾、Ouster 等。
混合固态/半固态雷达可以拆分为棱镜方案(转镜式、旋镜式、振镜式)和MEMS方案为代表。目前量产车上主要搭载的也是混合固态激光雷达居多。主要玩家:基于 MEMS 的速腾、Innoviz,基于转镜式的大疆 Livox、法雷奥、Luminar 等。
纯粹的固态激光雷达只有两种,一种是光学相控阵 OPA,采用称为光学相控阵的技术来控制激光束,而无需任何运动部件;一种是泛光 Flash,无需光束转向,只需一次闪光即可照明整个场景,再通过类似于数码相机的二维阵列图像传感器探测返射回来的光线。主要玩家:Quanergy、Ibeo 等。
目前主流的ADAS领域用于研究的大多是机械旋转式雷达,近期华为大疆等在做的和发布的大多是混合固态雷达,大家未来想要突破的是纯固态激光雷达!

一个更高维度的分类:以测距方式为依据,激光雷达可分为ToF与FMCW两个大类。
FMCW的全称是 Frequency Modulated Continuous Wave,翻译成中文为“调频连续波”,它是一种相比于TOF的激光雷达测距原理。
TOF(全称为Time of Flight,中文名为“飞行时间法”)的测距原理是:用光脉冲在目标物与激光雷达间的飞行时间乘以光速来测算距离。TOF激光雷达采用了脉冲振幅调制技术(AM),因而也被称为AM激光雷达。
与ToF路线不同,FMCW主要通过发送和接收连续激光束,把回光和本地光做干涉,并利用混频探测技术来测量发送和接收的频率差异,再通过频率差换算出目标物的距离。
简言之,ToF使用时间来测量距离,而FMCW使用频率来测量距离。
3 主要参数有哪些?
禾赛 128线产品参数
robosense 128线产品参数


①线数:雷达的单线和多线
单线雷达就是只有一个激光发射器和接收器,经过电机的旋转,投射到前面障碍物是一条线,这样的好处是数据量处理起来比较少,效率高,稳定性好,技术成熟,但是只能检测同一个高度的障碍物,不能测量整体轮廓,多应用于扫地机器人、酒店服务机器人。
多线雷达目前市场有4线、8线、16线、32线、64线、128线,就是在垂直方向上具有多个发射器和接收器(采集不同高度上的环境信息),通过电机的旋转(实现水平方向360°范围内的信息采集),获得多条线束,线数越多,物体表面轮廓越完善,当然处理的数据量越大,对硬件要求越高;多线雷达主要应用在无人驾驶上,可以计算物体的高度信息,并对周围坏境进行3D建模。
激光雷达的几线几线是啥意思?
②激光波长:像激光雷达常见的波长有850nm,905nm和1550nm.这个就都属于近红外线的范围,也就是NIR。可参考电磁波章节内容。所以我们可以通过红外相机来观察雷达的FOV表现。
谈谈激光雷达的波长
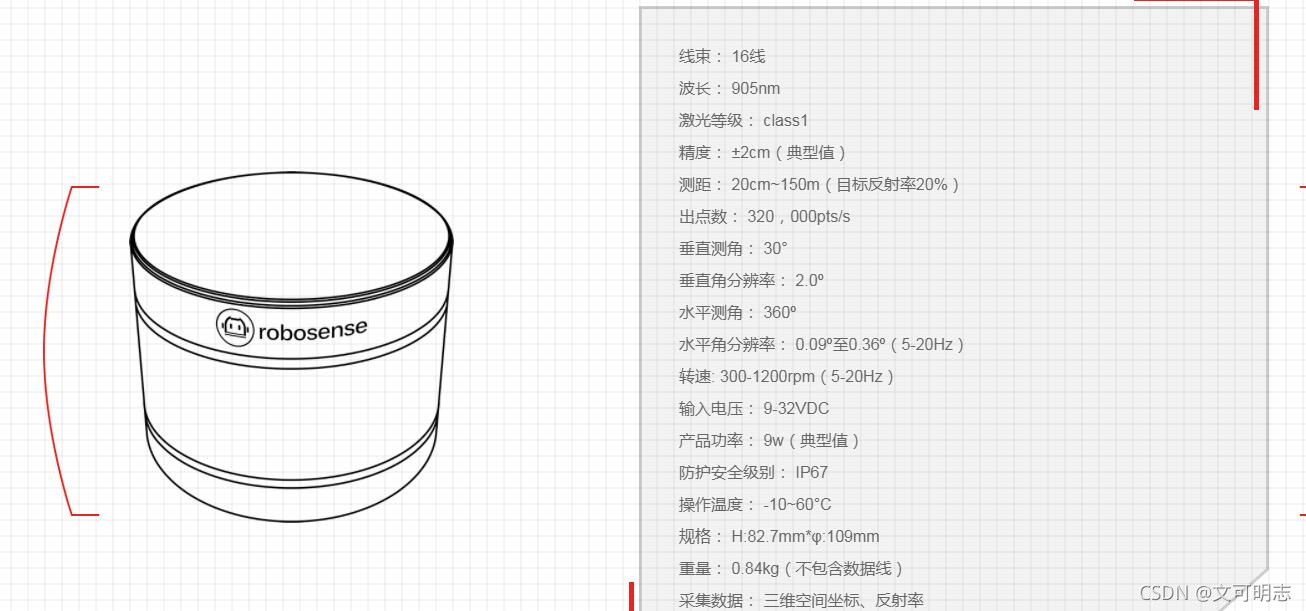
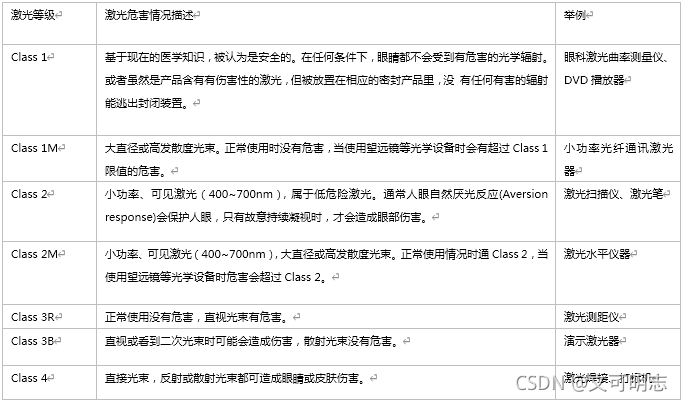
③激光等级/人眼安全级别:Class 1,参考IEC(国际电工委员会) 60825标准,它依据激光产品的波长、最大输出激光功率或能量,将激光产品分为 7 大安全等级,车载激光雷达一般要求人眼安全级别为 Class1,对人眼没有伤害。
自动驾驶的激光雷达会对眼睛造成伤害吗?
④测距/量程:一般情况下厂家会标明不同光照及反射率下激光雷达测量距离,目标的反射率越高则测量距离越远,目标的反射率越低则测量距离越近。像robosense参数表中的“200m@10%反射率”意思是激光雷达发射光束到 200 米的距离可以看清最低 10%光线反射率的物体,比如一张白纸。
盲区,顾名思义是激光雷达无法接收到激光回波信号的距离。一句话概括就是在可视范围之外即为盲区。
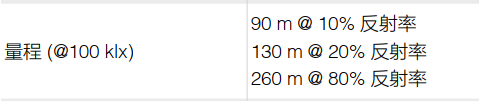
90m@10% 100klx 表示太阳光照度为100 klx ,被测目标反射率为10% 时(水泥地或路面的反射率 15~30% 30%,白色石膏墙反射率 为 90% ~99% 99%),测得最大探测距离为 90m 。(通常比较关心这个指标)
光照强度是一种物理术语,指单位面积上所接受可见光的光通量。简称照度 ,单位勒克斯(Lux或lx),常见的是千勒克斯klx。用于指示光照的强弱和物体表面积被照明程度的量。
科普篇:激光雷达探测距离为什么跟物体反射率有关?
⑤精度:±2cm
精度,即雷达可以感知的距离最小变化值。通常来说目标距离激光雷达越远测距准确度越低。以人眼为例,10 米距离上我们可以清晰看到一个酒瓶盖大小的物体,而 200 米后就看不见了。如下图,激光雷达点云数量随着汽车物体的远近而降低,车体边界轮廓精度随之下降。
⑥视场角FOV
视场角 FOV(Field of View),即有效扫描角度,在该角度范围内目标物体可被检测到,它分为水平视场角和垂直视场角。以人眼为例,就是你直视前方时可以看到的上下和左右范围。
水平视场角,即是水平面上所侦测的范围,以 64 线激光雷达为例,单纯的 64 线激光束的范围是远远不够的,但如果增加线束的范围又会大大增加成本,所以诞生了安装马达的机械旋转式激光雷达,这样就可以配合旋转的动作形成 360°水平视场角,而固态式激光雷达只能看到正前方某些度数(例如 60°至 120°);
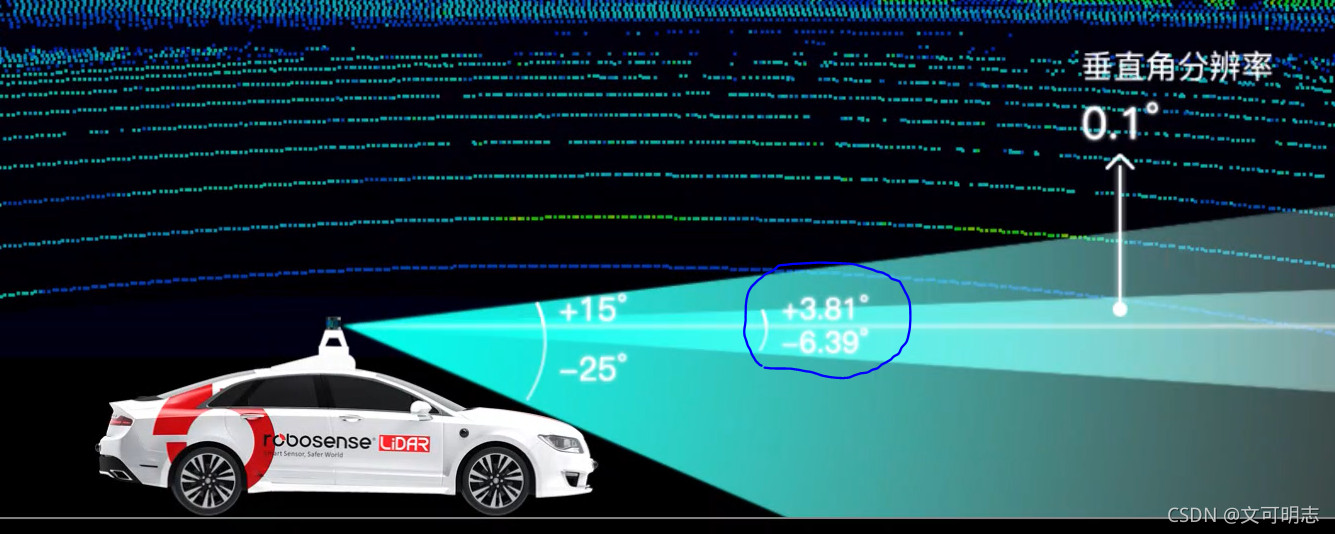
垂直视场角,垂直方位角指的是激光雷达垂直方向的检测角度,一般在 40°以内。而且光束也不是垂直均匀分布的,而是中间密,两边稀疏,而且激光光束会尽量向下偏置一定的角度,这也是为了扫描到更多的障碍物,在一定程度上可弥补上面说过的近处盲区。
下图这里我理解就是中间这里的3.81+6.39=10.2°,10.2/0.1=102,也就是说中间这里分布了102线,剩下的128-102=26线分布在两边比较稀疏。
⑦角分辨率
角分辨率,表示两个相邻测距点的角度。如下图,它也分为水平角分辨率和垂直角分辨率,如上面的 FOV 一样,水平角分辨率和垂直角分辨率分别表示水平面上点的夹角以及垂直面上点的夹角,这里就不过多赘述。
另外,角分辨率大小决定了一次扫描能返回的样本点数以及该激光雷达所能检测的最小障碍物大小,比如 2 个激光光束相邻测距点的角度为 0.4°,那么当探测距离为 200m 的时候,2 个激光光束之间的距离为 200m*tan0.4°≈1.4m。也就是说在 200m 之后,只能检测到高于 1.4m 的障碍物了。
⑧帧率
帧率,扫描频率表示一秒内雷达进行多少次扫描,其计量单位是 HZ(赫兹是电,磁,声波和机械振动周期循环时频率的单位。即每秒的周期次数“周期 / 秒”)。扫描频率越大,设备对外界环境的感知速度越快,系统实时性更高。
像参数表中的10Hz/20 Hz,10Hz应该就表示1s内雷达360°转了10圈。
⑨转速
转速,转速的国际标准单位为 rps (转 / 秒)或 rpm (转 / 分),1200rpm 意思是当前激光雷达的马达引擎转速是每分钟转 1200 圈。与帧率一样,转速越高设备对外界环境的感知速度越快。
像参数表中的600/1200rpm (10/20Hz),如果是10Hz,1s转10圈,1min就是600圈了,这个是可以对应上的。
⑩出点数
出点数(分单回波模式和双回波模式),就是单位时间内激光雷达可以扫描多少个点位。我们以速腾 128 线机械旋转激光雷达为例计算一下出点数:
已知:
机械旋转式激光雷达是 360°水平视场角,10Hz 帧率(每秒扫描转 10 圈),也就是每 100ms(10Hz)转 360 度,水平角分辨率为 0.2°,所以,当水平角分辨率为 0.2°,旋转一周将会产生 360/0.2=1800 个点,最终,出点数为 128 线1800 个点10HZ=2304000 点 / 秒(pts/s)
(pts=points,8pts就是8个点)
但为什么用禾赛的参数来计算确有问题呢,正常算出来应该是360/0.112810=4608000pts/s;然而写的是3456000pts/s,好像是96线算出来的数据360/0.19610=3456000.这是因为hesai里面只有中间的64线是0.1°的,两边比较稀疏的64线是0.2°的,所以写的是水平最高角分辨率为0.1°,也就是360/0.16410+360/0.26410=2304000+1152000=3456000(等价于96线算出来的结果)。
双回波模式
激光发射器发射的激光束是有面积的,当激光束探测某一个物体,在物体边缘处的激光束可能会一分为二,一部分在原物体处,一部分继续前进直到“触碰”到更远的物体。这时候一个发射信号就会得到两个回波信号,这就是双回波。
在激光雷达的系统配置里,可以选择单回波和双回波模式,在单回波模式下,可以选择接收光强高/低或距离远/近的回波,形象地讲就是双回波中面积大的激光对应强度高,距离远对应的飞行时间长的。
其他部分
对于车厂来说,车上所有电器元件的供电电压、产品功率、产品工作温度、IP 防尘风水等防护等级都是非常重要的采购指标,这里就不是我们需要关注的啦。
用一句话概括激光雷达的性能就是:通过激光良好的测距能力、穿透性和丰富的激光点云成像能力,可以帮助自动驾驶车辆看的更远、更清晰,随时获得车辆周围的三维信息。
4 相关计算公式
5 模组应用注意事项
涉及模块:
编码盘、光电编码器和激光雷达的制作方法
导电滑环的作用就是传电信号,传电力。它的功能特点是连接处相对旋转还能传电,电线不会缠绕。
导电滑环有什么作用
优缺点比较:
1.单线雷达只能平面式扫描,不能测量物体高度,有一定局限性。当前主要应用于服务机器人身上,如我们常见的扫地机器人。
6 相关供应商
目前国内供应商
禾赛科技(上海):目前产品线包括自动驾驶和机器人的激光雷达,以及用于能源行业安全巡检的激光遥测系统等,核心产品主要是PandarGT、Pandar64、Pandar40P、Pandar40,它也是国内固态激光雷达领先者,已推出混合固态40线激光雷达。
速腾聚创 (RoboSense):核心产品包括MEMS固态LiDAR系统技术解决方案(RS-LiDAR-M1)、机械式系列LiDAR系统技术解决方案RS-LiDAR-16、RS-LiDAR-32、RS-Ruby、RS-Bpear1等,当时新加坡装车车顶中央使用的就是RS-LiDAR-32,左右两侧则使用的是RS-LiDAR-16。
北科天绘(北京): 目前北科天绘的核心产品包括R-Fans-16、R-Fans-32、C-Fans-32、C-Fans-128。
镭神智能(深圳):目前镭神智能的激光雷达产品包括车规级128线混合固态激光雷达、CX系列16线激光雷达、CX系列32线激光雷达、导航型TOF激光雷达N301、W系列AGV防撞预警激光雷达等。
北醒光子(北京,Benewake):目前公司产品主要分为无人机定高雷达、小型避障雷达、多线长距雷达和AGV固态雷达。北醒光子的最新一代的固态激光雷达“Benewake-Horn-X(角龙)”可最远探测 350m,且服务目标为 L4 级别以上的自动驾驶。
大疆/览沃(深圳):Livox,Livox首款车规级激光雷达HAP(Horizon Automotive Platform),属于旋转棱镜式类固态激光雷达,小鹏P5上用的就是这个。
图达通(苏州,Innovusion):蔚来ET7上的混合固态激光雷达就是他们家的。
目前国外供应商
Velodyne(威力登):性价比很高的Puck、多功能的Ultra Puck、为自动驾驶服务的Alpha Prime、针对ADAS进行优化的Velarray。
Leddar Tech: 一款专为自动驾驶汽车设计的3D Flash激光雷达Leddar Pixell。
Ibeo:Ibeo和法雷奥合作量产可用于汽车的MEMS固态激光雷达ScaLa被搭载在了奥迪A8上。
Ouster:美国初创企业,产品有Ouster OS0,OS1,OS2等。
Ouster产品官网
Ouster 的数字激光雷达到底是什么?
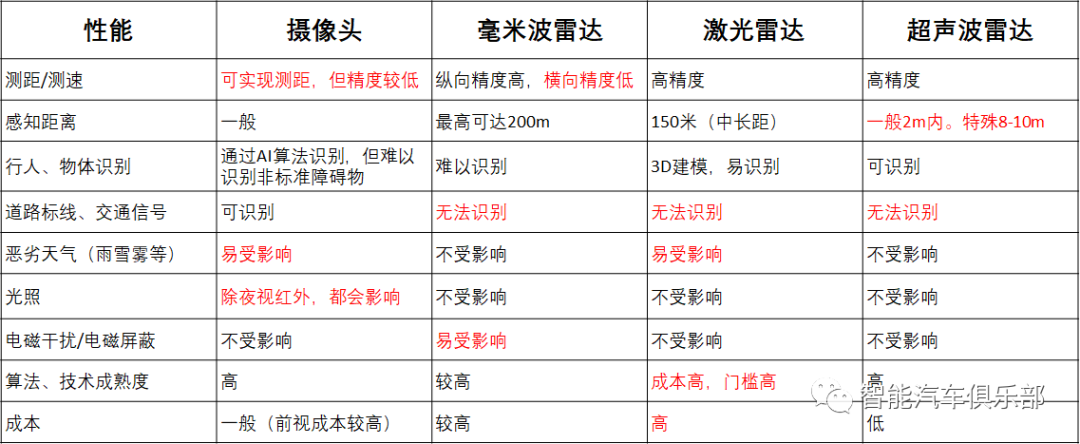
7 自动驾驶传感器性能对比
1.频率&波长区别:毫米波雷达的频段是属于微波,其频率高于无线电,低于可见光和红外线,比较关注10GHz—200GHz。而激光雷达的频段属于红外线的范围,频率大致为10^14Hz(100000GHz),常见的波长有850nm,905nm和1550nm.
10.1 电磁波 Electromagnetic Wave
谈谈激光雷达的波长
2.信号区别:激光雷达发射的电磁波是一条直线,主要以光粒子发射为主要方法,而毫米波雷达发射出去的电磁波是一个锥状的波束,这个波段的天线主要以电磁辐射为主。
3.抗环境干扰能力:从抗干扰能力上来讲,由于激光雷达通过发射光束进行探测,受环境影响较大,光束受遮挡后就不能正常使用,因此无法在雨雪雾霾天,沙尘暴等恶劣天气中开启,而毫米波导引头穿透雾、烟、灰尘的能力强,因此可以在糟糕的天气中探测,在这一点上毫米波雷达更胜一筹。
(如果是抗电磁干扰能力:激光雷达胜于毫米波雷达)
4.探测精度/分辨率:从探测精度上来讲,激光雷达具有探测精度高-厘米级、探测范围广及稳定性强等优点,在精确度方面,毫米波雷达的探测距离受到频段损耗的直接制约(想要探测的远,就必须使用高频段雷达),也无法感知行人,并且对周边所有障碍物无法进行精准的建模。这一点就大不如激光雷达。激光雷达最大优势:三维点云建模
(一般情况下,频率越高的信号能承载的信息和分辨力也会更高。因此,在这一点上,毫米波雷达就大不如激光雷达。)
5.成本:激光雷达由于获取的数据量远超毫米波雷达,需要更高性能的处理器来处理数据,所以成本也相对更高。

【20220108】【雷达】毫米波雷达(二)—— 毫米波雷达和激光雷达的区别及优缺点比较
8 参考资料
和机械式旋转激光雷达相比,MEMS固态激光雷达有哪些优势和劣势?
微信视频号-全球智能汽车供应链-激光雷达,MEMS方案将是主流?


















 5917
5917

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









