







 本文介绍了VLP-16激光雷达的参数对比,包括精度、反射率测量和激光返回模式。VLP-16能区分漫反射和后向反射物体,提供最强和最后返回模式。还探讨了双返回模式在林业应用中的用途,以及如何通过锁相功能减少多传感器干扰。此外,详述了以太网接口、GPS同步和NMEA语句的使用,以及与GPS接收器的连接方法。
本文介绍了VLP-16激光雷达的参数对比,包括精度、反射率测量和激光返回模式。VLP-16能区分漫反射和后向反射物体,提供最强和最后返回模式。还探讨了双返回模式在林业应用中的用途,以及如何通过锁相功能减少多传感器干扰。此外,详述了以太网接口、GPS同步和NMEA语句的使用,以及与GPS接收器的连接方法。
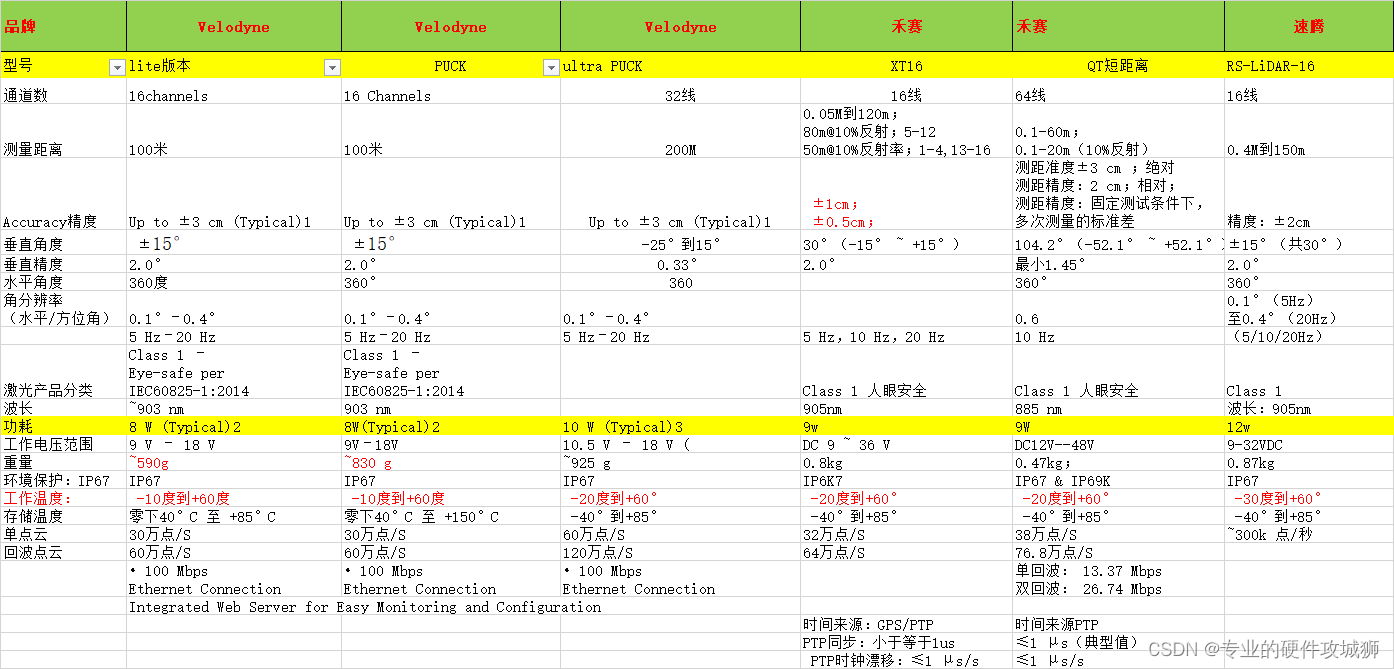
目前主流机械式激光雷达精度对比;
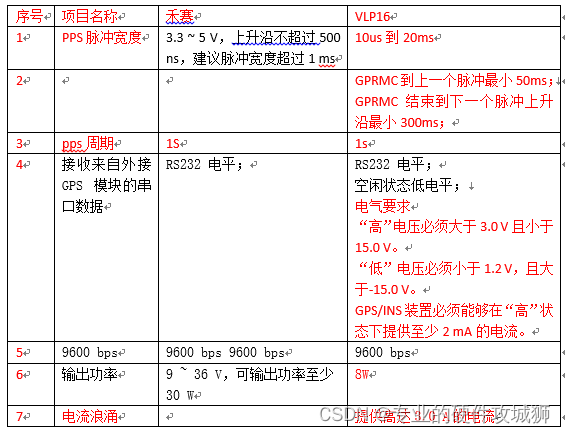
对于VLP-16接线盒资料翻译及记录
6.1 校准反射率
VLP-16 可以测量物体的反射率,而不受所涉及的激光功率和距离的影响。返回的反射率值基于在工厂针对 NIST 校准反射率参考目标的激光校准。
对于每次激光测量,除了距离之外,还会返回一个反射率字节。反射率字节值被分成两个范围,允许软件区分低范围内的漫反射体(例如树干、衣服)和高范围内的后向反射体(例如道路标志、车牌)。
后向反射器以最小的散射将光反射回其光源。 VLP-16 提供自己的光,发射激光和接收检测器之间的间隔可以忽略不计,因此与倾向于散射反射能量的漫反射器相比,回射表面会带有反射的 IR 光。
漫反射器报告的值为 0 到 100,反射率从 0% 到 100%。
后向反射器报告的值从 101 到 255,其中 255 代表理想的反射。
笔记:
当激光脉冲没有产生测量结果时,例如当激光射向天空时,距离和反射率值都将为 0。关键是距离为 0,因为 0 是有效的反射率值(即高出一步噪音)。
6.2 激光返回模式
VLP-16 支持三种激光返回模式:最强、最后和双。可以将传感器配置为通过传感器的 Web 界面(该设置称为“返回类型”)或通过 curl 命令以编程方式以这些方式之一以交互方式处理激光返回。 (有关设置激光返回模式的其他信息,请参阅第 71 页的配置屏幕或第 78 页的带卷曲的传感器控制。)
激光返回是对反射的检测。 VLP-16 支持每次激光射击最多两次返回。
6.2.1 单次返回模式:最强、最后
如对页上的图 6-1 所示,当激光脉冲击中固体壁时,将获得一次返回或测量结果。在这种情况下,读数被认为是最强的和最后的回报。 (有关传感器发射的激光脉冲的性质(包括脉冲的矩形形状)的更多信息,请参见第 121 页的激光脉冲。)
图6-1
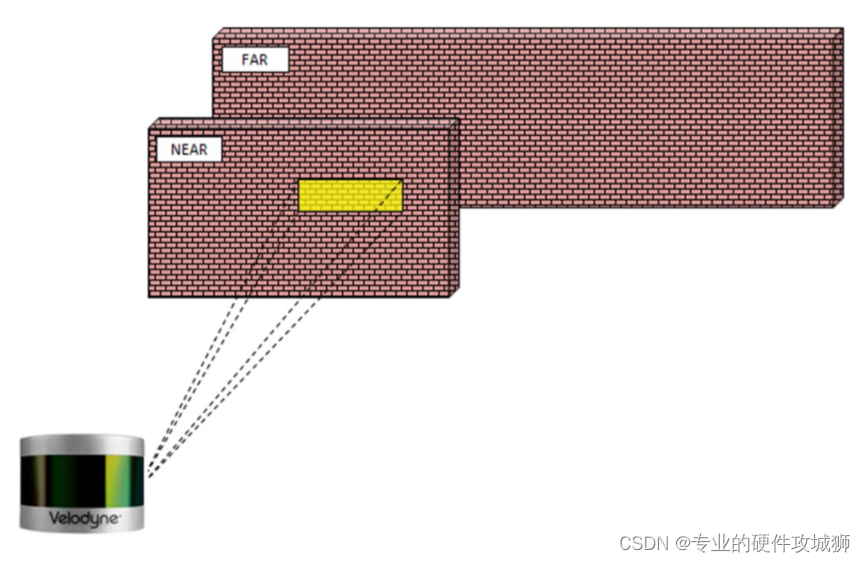
6.2.2 多次回波
由于光束发散,任何单次激光发射都可以进行多次激光返回。当激光脉冲离开传感器时,它会慢慢变大。一个脉冲可以大到
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2550
2550

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









